
国際特許分類[B23P19/06]の内容
処理操作;運輸 (1,245,546) | 工作機械;他に分類されない金属加工 (71,475) | 金属の他の加工;複合作業;万能工作機械 (3,247) | ある程度の変形を伴うかどうかに関わらず,金属部品または金属対象物,または金属と非金属とによりなる部品を単に一体に結合または分離するための機械 (1,498) | 部品の組立て用,または分解用 (562) | ねじまたはナットの締付けまたは緩め機 (291)
国際特許分類[B23P19/06]に分類される特許
41 - 50 / 291
ロボット、ロボット制御装置、ロボット制御方法、およびロボット制御プログラム
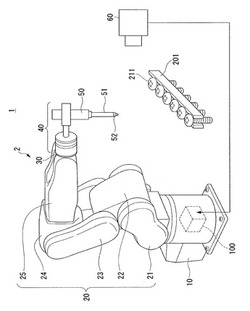
【課題】汎用性の高いねじ締めを行えるロボット、ロボット制御装置、ロボット制御方法、ロボット制御プログラムを提供する。
【解決手段】ドライバービット51の先端の係合部52が磁化されているドライバー50を把持するアーム部20と、アーム部20を制御する制御部100とを備え、制御部100は、ドライバー50の係合部52を磁力により係合可能な頭部を有するねじ211の頭部頂面の溝に押しつけた状態で、ドライバー50の係合部52にねじ211の頭部頂面の溝が嵌合した状態で磁力により生じる吸着力よりも小さく、ドライバーの係合部52にねじ211の頭部頂面の溝が当接した状態で磁力により生じる吸着力よりも大きい慣性力がねじ211に作用する第1の所定の加速度で、ねじ211が吸着されたドライバー50を移動させる。
(もっと読む)
締結弛緩装置

【課題】締結弛緩装置において、装置の信頼性の向上を可能とする。
【解決手段】複数のスタッドボルト65の配列方向に沿って移動可能な搬送装置73a,73b,73c,73dと、この搬送装置73a,73b,73c,73dを独立して制御する制御盤152a,152b,152c,152dと、複数のボルトテンショナ102a,102b,102c,102dと、このボルトテンショナ102a,102b,102c,102dを独立して制御する制御盤153a,153b,153c,153dと、制御盤152a,152b,152c,152dと制御盤153a,153b,153c,153dを制御する制御盤151を有する搬送操作装置77とを設け、搬送操作装置77に電源ケーブル81a,81b,81c,81dを介して制御盤152a,152b,152c,152dに接続し、故障診断装置を設ける。
(もっと読む)
自動ねじ締め機
【課題】ねじのねじ込み量の良否判定を正確に行うことができる自動ねじ締め機を提供する。
【解決手段】ドライバツール6とともに移動するビット63に押されたねじSがワークに当接することにより、ビット63に所定の移動抵抗が作用したことを検知し、この位置からねじ締め完了位置までのビット63の移動量を測定する。このビット63の移動量を測定する間、ねじ込み時の移動量とは異なるビット63の移動量を検出し、これを前記測定した移動量から除外する補正を行い、この補正した移動量を予め設定された基準移動量と比較してねじ込み量の良否判定を行う。
(もっと読む)
軸状部品供給装置および方法
【課題】装置の構成を簡易にすることができ、軸状部品の向きが所定方向でない場合に所定方向に整列させて供給することのできる軸状部品供給装置および方法を提供すること。
【解決手段】ボルト1が通る筒状通路21を有する筒部材20と、筒状通路を開閉するカム機構50と、切換機構60とを備え、カム機構は、第1〜第3のシャッタ51〜53を有し、第1〜第3のシャッタはいずれも、閉鎖領域と開放領域とを有し、閉鎖領域および開放領域は、ボルトの頭部が上向きの場合、第2のシャッタが頭部を係止している状態から開放領域に切り替わる第1のタイミングで、ボルトを通過させ、ボルトの頭部が下向きの場合、第1のシャッタが頭部を支持している状態から開放領域に切り替わる第2のタイミングで、ボルトを通過させ、切換機構は、第1または第2のタイミングで通過したボルトのうちのいずれか一方をそのまま通過させ、他方を反転させたのち通過させる。
(もっと読む)
探索装置、自動組付け装置、探索方法、およびプログラム
【課題】部品のワークへの組付け位置を精度よく探索できる探索装置を提供する。
【解決手段】ワークは、バカ穴とバカ穴の底面に形成されたネジ穴とを有する。探索装置は、ネジと底面とを接触させた状態で、u軸方向の正および負の向きと、v軸方向の正および負の向きとに、ネジを移動させる。探索装置は、u軸方向の正および負の向きと、v軸方向の正および負の向きとに、ネジを各々移動させたときに反力が閾値Th1以上となる位置Pα,Pβ,Pγ,Pδを特定する。探索装置は、位置Pαと位置Pβとの間の距離が閾値Th2未満の場合には、位置Pαと位置Pβとの中間位置を起点としたv軸方向への移動と、位置Pγおよび位置Pδの特定とを実行する。探索装置は、位置Pγと位置Pδとの間の距離が閾値Th2未満の場合には、位置Pγと位置Pδとの中間位置をネジの組付け位置と判断する。
(もっと読む)
ネジ供給装置
【課題】 ネジ締め位置の近傍でネジを取り出すことができ、且つ、取り出したネジを直ちにネジ締め位置に移動することができネジ供給装置を提供することを課題とする。
【解決手段】 収容したネジ12をネジ取り出し位置に移動させる供給レール14の前端部に固定ガイド20が取り付けられる。固定ガイド20は、供給レール14が所定の角度で傾斜した状態で供給レール14の前端部がネジ締め位置の近傍に配置されるように位置決めする。供給レール14の前端部に取り付けられたネジ締めガイド40は、ネジ取り出し位置にあるネジ12を装着したドライバビット70aに当接し、ネジ締め位置で垂直となるように案内する。
(もっと読む)
作業の良否判定システム及び良否判定方法
【課題】ロボット1等の機械装置においてワークの保持部近傍の大型化やケーブル数の増加を抑制するとともに、センサ等の故障を防止する。
【解決手段】ロボット1等の機械装置におけるワークの保持部(例えばチャック8)と、その支持部(例えば手首部6)との間に可動部(例えばコンプライアンス装置7)を設け、作業に伴う保持部及び支持部の位置の変化からその良否を判定する。例えば、可動部の保持部側及び支持部側の部材に夫々マーカーMを設けて、カメラ11により撮影した画像中のマーカー位置を画像処理により検出し、保持部及び支持部の間隔の変化から作業の良否を判定する。
(もっと読む)
ねじ締め装置
【課題】作業者が誤ってワークを取り替えることのないねじ締め装置の提供。
【解決手段】ドライバビット4cを先端に有するドライバツール4と、このドライバツール4を支持して水平および垂直方向に可動するアーム3とから成り、ドライバツール4を作業者が把持してワークの上空で操作し、目標のねじ締めポイントへ下降させてねじ締め付け作業を行うように構成されたねじ締め装置1において、ドライバツール4の位置情報を検出するロータリエンコーダ14,23,34と、ワークの有無を検出するセンサ6と、複数のねじ締めポイント及びこれらポイントの経由順序を予め設定し、この順序通りにドライバツール4が経由せずにセンサ6による検出信号が切り替わった場合には、その旨を表示するように構成した制御ユニット50とを備えるねじ締め装置1による。
(もっと読む)
ねじ締め装置
【課題】作業者が段取り作業を忘れることのないねじ締め装置の提供。
【解決手段】ドライバビット4cを先端に有するドライバツール4と、このドライバツール4を支持して水平および垂直方向に可動するアーム3とから成り、ドライバツール4を作業者が把持してワークの上空で操作し、目標のねじ締めポイントへ下降させてねじ締め付け作業を行うように構成されたねじ締め装置1において、ドライバツール4の位置情報を検出するロータリエンコーダ14,23,34と、ねじ締めポイント、及び当該ねじ締めポイントではない位置に待機位置ポイント、並びにこれらポイントの経由順序を予め設定し、これらポイントとドライバツール4の現在位置とを照合判定し、予め設定された順序通りにドライバツール4が経由しない場合には、その旨を表示するように構成した制御ユニット50とを備えるねじ締め装置1による。
(もっと読む)
ねじ部品締結機
【課題】歯付きクラッチによる伝達系の切り替えを円滑に行うことができるねじ部品締結機を提供する。
【解決手段】本発明のねじ部品締結機1は、ドライバビットを先端に有する出力軸11と、モータ3に連結して高速低トルク駆動を出力軸11へ伝達する高速低トルク伝達系と、モータ3に減速機12を介して連結して低速高トルク駆動を出力軸11へ伝達する低速高トルク伝達系と、歯部141a,142aが形成された入力部141および出力部142を有し、これらに前記伝達系をそれぞれ連結して歯部141a,142aの噛合いによって伝達系を切り替え可能に構成された歯付きクラッチ14と、この歯付きクラッチ14を回転自在に支持するクロスローラベアリング10a,10bとを備える。
(もっと読む)
41 - 50 / 291
[ Back to top ]