
国際特許分類[B60L11/14]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 電気的推進車両の推進装置;車両用磁気的懸架または浮揚装置;電気的推進車両の変化の監視操作;電気的推進車両のための電気安全装置 (20,799) | 乗物の内部に動力供給源をもつ電気的推進装置 (11,220) | 機関駆動発電機を用いるもの (6,487) | 直接機械的に推進される設備をもつもの (5,945)
国際特許分類[B60L11/14]に分類される特許
61 - 70 / 5,945
車両および車両の制御方法
【課題】バッテリレス走行制御中にモータに印加される電圧が不安定となることを抑制する。
【解決手段】エンジン、モータ、ジェネレータ、モータおよびジェネレータに電気的に接続されたバッテリを備える車両において、ECUは、バッテリの故障時に、バッテリをモータおよびジェネレータから切離し、ジェネレータが発電した電力でモータを駆動させて車両を走行させる「バッテリレス走行制御」を行なう。ECUは、バッテリレス走行制御中(S20にてYES)、車速Vが基準車速Vshを越えると(S24にてYES)、モータとジェネレータとを電気的に結ぶ一対の電力線間の直流電圧(以下「システム電圧VH」という)を増加させる処理を行なう(S25)ことで、仮に矩形制御に移行されたとしてもシステム電圧VHが極端に低下することを防止する。
(もっと読む)
ハイブリッド電気自動車の制御装置

【課題】車両発進時の負荷が大きい場合にも不要な電力消費を排除し、バッテリのSOCの低下を抑制することのできるハイブリッド電気自動車の制御装置を提供すること。
【解決手段】エンジン2とモータ4との間にクラッチ6が設けられたハイブリッド電気自動車の発進時において、統合ECU22は、要求トルクが最大モータトルクに達した場合には(t1)、モータトルクを0にするとともに、クラッチ6を接続していくことでエンジントルクを増加させ、車両が発進し始めた時点(t2)からモータトルクを復帰させる。
(もっと読む)
電源管理装置、電源管理方法、および、電源管理システム
【課題】電力変換器の故障が発生した場合でも、高電圧回路から低電圧回路へ電力を供給することができ、車両の補機類を停止させることがなく、安定的に走行を継続する。
【解決手段】第1の蓄電器1と、第2の蓄電器2と、第1の蓄電器1の電力を変換して第2の蓄電器2や車両の補機類5に供給する電力変換器4と、第1の蓄電器1に接続されたモータジェネレータ3とを備えた車両に設けられた電源管理装置であって通常時は第1の蓄電器1と第2の蓄電器2との間を非導通状態とし、電力変換器4の故障が検出された時に導通状態に切り替えるスイッチ6と、スイッチ6を非導通状態から導通状態へ切替える前に、第1の蓄電器1の電圧と第2の蓄電器2の電圧との差が所定電圧差以内となるようにモータジェネレータ3を制御する電源管理部7とを備えている。
(もっと読む)
車両および車両の制御方法
【課題】バッテリレス走行制御中にモータに印加される電圧が不安定となることを抑制する。
【解決手段】エンジン、モータ、ジェネレータ、モータおよびジェネレータに電気的に接続されたバッテリ、モータと駆動輪に連結された出力軸との間に設けられた変速機を備えるハイブリッド車両において、ECUは、バッテリの故障時に、バッテリをモータおよびジェネレータを含む電気システムから切離し、エンジンの動力を用いてジェネレータが発電した電力でモータを駆動させて車両を走行させる「バッテリレス走行制御」を行なう。ECUは、バッテリレス走行制御への移行要求がある(S20にてYES)、変速機の変速段が低速段Loであるとき(S24にてYES)は、低速段Loから高速段Hiへの変速を行なう(S25)ことで、バッテリレス走行制御中にモータの制御モードが矩形制御モードに移行され難くする。
(もっと読む)
ハイブリッド車両の制御装置
【課題】車両後進走行時の走行駆動力を内燃機関のモータリングによって上昇させる場合に、段差を乗り越える際の走行駆動力を高く得ることができるハイブリッド車両の制御装置を提供する。
【解決手段】FF方式のハイブリッド車両1において、後進走行時、後輪が段差を乗り越したことを加速度センサによって検知し、その後の後進走行距離が車両のホイールベースに近づき、その差が所定値未満となって前輪6a,6bが段差に当接する直前で第1モータジェネレータMG1によるエンジン2のモータリングを行い、前輪6a,6bへのトルクを増大させる。これにより段差乗り越しのための走行駆動力を最適なタイミングで高めることができる。
(もっと読む)
ハイブリッド車両用システム
【課題】電気車モードでの走行能力を強化すると共に、これを実現するための材料費などの原価を節減できるハイブリッド車両用システムを提供する。
【解決手段】
ハイブリッド車両用システムはエンジン、変速機、及びバッテリを含み、前記システムは、前記エンジンと前記変速機を連結して、第1部分と第2部分で構成される第1クラッチ、前記第1部分と連結して、前記変速機に直接連結する第1モータ/ゼネレータ、前記第2部分と連結する第2モータ/ゼネレータ、及び前記第2モータ/ゼネレータと前記変速機を連結する第2クラッチ、を含み、前記第1部分と第2部分は個別に作動可能なクラッチとすることを特徴とする。
(もっと読む)
ハイブリッド車両の駆動制御装置
【課題】 エンジン回転数と車速との関係により設定される擬似的な変速段の走行状態において、電力収支の破綻を回避させることを目的とする。
【解決手段】 エンジンとモータ・ジェネレータと蓄電装置とを備え、エンジンの回転数に制限回転数Nemax,Neminを設定することで車速に対するエンジン回転数の比率が一定になるようにエンジン回転数を制御することができるハイブリッド車両の駆動制御装置において、蓄電装置の出力可能な電力量Woutが減少する状態に応じてエンジンに係る回転数上限値Nemaxを高回転数側に変更させる制限回転数変更手段を備える。
(もっと読む)
ハイブリッド車両の制御装置
【課題】従来よりも効率良く発電を行うことが可能なハイブリッド車両の制御装置を提供する。
【解決手段】内燃機関2と接続された入力軸11と、駆動輪7と動力伝達可能に接続された出力軸12とを有し、入力軸11と出力軸12との間の変速比を変更可能な変速機10と、モータ・ジェネレータ3と入力軸11とが動力伝達可能に接続される入力軸接続状態とモータ・ジェネレータ3と出力軸12とが動力伝達可能に接続される出力軸接続状態とに切り替え可能な第2クラッチ25と、モータ・ジェネレータ3と電気的に接続されたバッテリ4とを備えたハイブリッド車両1に適用され、車両1の速度が所定の判定速度以上の場合に第2クラッチ25を出力軸接続状態から入力軸接続状態に切り替える制御装置において、バッテリ4の蓄電率が所定の判定蓄電率未満の場合には、バッテリ4の蓄電率が判定蓄電率以上の場合よりも判定速度を小さくする。
(もっと読む)
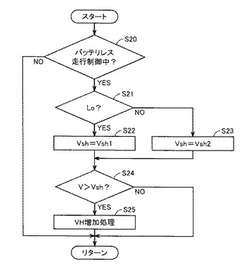
車両および車両の制御方法
【課題】バッテリレス走行制御中にモータに印加される電圧が不安定となることを抑制する。
【解決手段】エンジン、モータ、ジェネレータ、モータおよびジェネレータに電気的に接続されたバッテリを備えるハイブリッド車両において、ECUは、バッテリの故障時に、バッテリをモータおよびジェネレータを含む電気システムから切離し、エンジンの動力を用いてジェネレータが発電した電力でモータを駆動させて車両を走行させる「バッテリレス走行制御」を行なう。ECUは、バッテリレス走行制御中である場合(S20にてYES)、車速Vが制限車速Vshを超えているとき(S21にてYES)は、車速制限を行なう(S22)ことで、バッテリレス走行制御中にモータの制御モードが矩形制御モードに移行され難くする。
(もっと読む)
ハイブリッド電気自動車の制御装置
【課題】車両発進時の負荷が大きい場合にも不要な電力消費を排除し、バッテリのSOCの低下を抑制することのできるハイブリッド電気自動車の制御装置を提供すること。
【解決手段】駆動源としてエンジン及びモータを選択可能なハイブリッド電気自動車において、統合ECU22はアクセルオフ時にモータ4による回生積算量を算出し(S1、S2)、アクセルの踏み込みが検出されたときには(S3)、当該回生積算量が判定閾値より大であり且つバッテリ18のSOCが所定SOC以上であるか否かを判別し(S4)、真(Yes)である場合はモータ4での加速を選択し(S6)、偽(No)である場合にはエンジン2による加速を選択する。
(もっと読む)
61 - 70 / 5,945
[ Back to top ]