
国際特許分類[B60T8/175]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 車両用制動制御方式またはそれらの部品;制動制御方式またはそれらの部品一般;車両への制動要素の構成一般;車両が不意に動くのを阻止するためのもち運びできる装置;制動装置の冷却を助長するための車両の改造 (12,974) | 車両の状態または路面状況の変化に適合するための車輪制動力の調整装置,例.制動力の配分を制限または変更するための装置 (5,901) | ブレーキを制御するために電気調整手段または電子調整手段を用いるもの (3,677) | 車両の加速時の過度な車輪回転の防止に特に適したブレーキ調整,例.トラクション制御のためのもの (131)
国際特許分類[B60T8/175]に分類される特許
101 - 110 / 131
トラクション制御装置

【課題】 エンスト傾向にある場合にトラクション制御に入ってしまうことで、エンストが起こることが的確に判定できなくなることを防止する。
【解決手段】 エンスト傾向にある場合にはトラクション制御が開始されないように、エンスト傾向でないことをトラクション制御開始条件とする。また、トラクション制御開始後にも、エンスト傾向にあることを的確に判定できるように、エンスト傾向にあるか否かの判定に用いるエンジン回転数のしきい値を車両状態に応じて変更する。これにより、エンジン回転数のしきい値を一定値(所定回転数)とした場合と比べて、エンスト傾向を的確に検出することが可能となる。これにより、エンストが起こる可能性が低いときにまで頻繁にトラクション制御開始が禁止されることを防止することが可能となる。
(もっと読む)
トラクション制御装置

【課題】 トラクション制御中に車輪速度センサの故障等が発生して、ABS制御が実行されることになった場合に、車両が不安定になることを防止できるトラクション制御装置を提供する。
【解決手段】 トラクション制御中に非駆動輪の車輪速度センサ5の故障等によってABS制御が開始された場合に、駆動輪となる後輪RL、RRのW/C14b、15bのW/C圧を保持する。このため、そのときにM/C13a内に発生しているM/C圧の残圧が駆動輪となる後輪RL、RRのW/C14b、15bに加えられないようにすることができ、車両が不安定になることを防止することが可能となる。
(もっと読む)
デジタルデータバス
車軸に夫々の軸回転速度を計測する車軸回転速度センサ1,2,4,5を備える鉄道車両用ブレーキシステム。車軸回転速度センサの出力信号はブレーキ圧を個別かつローカルに制御するデータプロセッサ7に送られる。データープロセッサは各車軸ごと、各台車ごと或いは各車両ごとにブレーキ圧をコントロールするローカル知能を備え、更にデータープロセッサはブレーキ制御ユニットとの間の信号送受を行なうためのデータバス18を備え、各センサからの出力信号は、他の車軸或いは他の台車上に設けられた他のセンサからの出力信号を処理する他のデータプロセッサ17と上記データプロセッサ7との間での通信を可能とするように処理される。 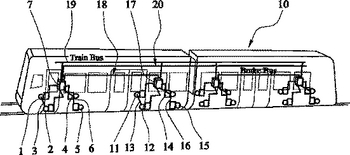 (もっと読む)
(もっと読む)
自動車や他の車両の走行運転の制御方法
本発明は、個々の車輪および/又は動力伝達系の構成要素に付設された回転センサを介して、所定の走行状態が検出され、制御装置で評価され、車両の所定の機能に対する制御指令や警報信号に転換される、自動車などの走行運転の制御方法に関する。このようにして、例えばABS装置(アンチロックブレーキシステム)、ASR装置(アンチスリップレギュレーションシステム)あるいはEBS装置(電子制御ブレーキシステム)が制御される。
本発明は、従来公知の回転数センサに代えて、回転方向センサを利用することを提案する。回転方向センサは、実際回転方向の検出のほかに、そもそも回転運動が存在するか否かも検出できる。回転方向センサにより、車両の多くの機能を簡単に制御できる。また、回転方向を求めるために従来利用されていた種々のパラメータによる確定計算法を省くことができる。
(もっと読む)
車両のスタック脱出装置
【課題】車両のスタックを検出した場合に自動的にスタックを脱出できる。
【解決手段】スタック脱出装置は、車両発進時に車両のスタックを検出した場合(ステップS1、ステップS2)、スタック脱出を検出するまで(ステップS7)、四輪操舵装置の機能としての逆相制御、同相制御及び張出し防止制御を禁止して(ステップS3)、駆動輪を転舵制御するとともに、当該駆動輪がスリップしないように駆動力抑制制御を行う(ステップS4)。
(もっと読む)
車両統合制御装置
【課題】 各制御ユニットの要求を適切に調停できる車両統合制御装置の提供。
【解決手段】 本発明による車両統合制御装置では、複数の制御ユニットのうちの特定のマネージャ制御ユニットが、乗員の要求又は第1の他の制御ユニット(P−DRM,DSS)からの要求に基づいた第1の物理量次元の制御目標値と、第2の他の制御ユニット(VDM)からの第1の物理量次元の要求値とを調停する第1の調停部と、第1の調停部で調停を経た第1の物理量次元の制御目標値を、第2の物理量次元の制御目標値に変換する変換部と、変換部で第2の物理量次元に変換された制御目標値と、T/M制御ユニットからの第2の物理量次元の要求値とを調停する第2の調停部と、第2の調停部で調停を経た制御目標値を、該制御目標値を実現すべきエンジン制御ユニットへと出力する出力部とを備える。
(もっと読む)
車両挙動制御装置
【課題】 差動装置を介して左右の駆動車輪が接続される車両において、駆動力の回り込み現象が生じた場合でも車両の挙動が乱れるのを防止する。
【解決手段】 車両の旋回走行中の車両状態量から車輪T毎に車輪ブレーキの制動力を制御し制動力を付与させる横滑り抑制手段15と、この制御中において、左右の車輪Tのうち一方の車輪Tに伝達される駆動力が該制御により付与される制動力で抑制されるにつれ、他方の車輪Tに伝達される駆動力が増加する駆動力の回り込みが生じる場合、トラクション制御の開始閾値を、該制御の開始が遅れる側に補正する補正部21とを具備する。
(もっと読む)
車両およびその制御方法
【課題】モータからの動力により走行する車両において、駆動輪の空転によるスリップが発生したときにモータによるスリップ抑制制御とブレーキによるスリップ抑制制御とが干渉するのを防止する。
【解決手段】回転位置検出センサからのモータの回転角加速度αが閾値を超えたときに回転角加速度αに基づくトルク上限値Tmaxに向けて比較的大きな勾配のレートΔT1をもってレート処理によりモータのトルクを制限し、その後に車輪速センサからの車輪速が目標車輪速度を超えたときにスリップ輪にブレーキによる制動力を出力すると共にレートΔT1に代えて比較的小さな勾配のレートΔT2をもってレート処理によりモータのトルクを制限する(S160〜S220)。これにより、スリップを迅速に抑制できると共にモータによるスリップ抑制制御とブレーキによるスリップ抑制制御とが干渉するのを抑制して運転フィーリングを良好なものとすることができる。
(もっと読む)
駆動力制御装置
【課題】 極低μ路等の走行時に各車輪を少しずつスリップさせながら車両を走行させた場合においても、車速を正確に推定して駆動スリップを抑制に抑制できるようにする。
【解決手段】 スリップ制御手段18に、全ての車輪2〜5がスリップする状況が発生したか否かを判定するスリップ状況判定部19と、全ての車輪2〜5がスリップする状況が発生したと判定された場合に、所定時間に亘って前後輪の一方を駆動輪としつつ、他方を従動輪とするように駆動力配分機構6を制御する駆動力配分制御部20と、全ての車輪2〜5がスリップする状況の発生時に従動輪とされた車輪に油圧カップリング7から入力される駆動力を打ち消すための制動力を付与する制動力付与制御部21と、上記従動輪の回転速度に基づいて車速を推定するとともに、この車速の推定値に基づいて各車輪2〜5の駆動スリップを抑制する制御を実行する駆動スリップ抑制部22とを設けた。
(もっと読む)
車両のスリップ状態取得装置、並びに、そのスリップ状態取得装置を用いた車両のトラクション制御装置及びアンチスキッド制御装置
【課題】 全輪駆動車両において、車輪のスリップ状態をより適切に取得することができる車両のスリップ状態取得装置を用いた車両のトラクション制御装置等を提供すること。
【解決手段】 この装置は、車輪の加速スリップ量(車輪速度Vw−前後加速度センサ出力に基づく推定車体速度Vrefacc)がしきい値Sth以上となった場合にその車輪に対してトラクション制御を実行する。Sthは原則的に基本しきい値Sthbaseに設定される。一方、「0<アクセル操作量<所定の微小値」と、「車輪速度センサ出力に基づく車体加速度DVwmin(最小車輪速度Vwminの時間微分値)>前後加速度センサ出力に基づく車体加速度Gup(前後加速度センサ検出値に所定値を加えた値)」の2つの条件が所定時間T1に亘って成立したとき、「低μ路面走行中における僅かなアクセル操作により全輪の加速スリップ量が緩やかに増大していく現象」が発生していると判定して、Sthを値β1だけ小さくする。
(もっと読む)
101 - 110 / 131
[ Back to top ]