
国際特許分類[B62D105/00]の内容
国際特許分類[B62D105/00]に分類される特許
1 - 10 / 42
車両の走行制御装置
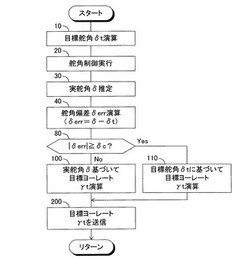
【課題】車両を目標走行ラインに沿って走行させるため操舵輪の舵角が目標舵角になるよう舵角可変装置を制御する方法を提供する。
【解決手段】操舵輪の舵角δが目標舵角δtになるよう舵角可変装置を制御することにより車両を目標走行ラインに沿って走行させる車両の走行制御装置に於いて、操舵輪の目標舵角に対する実舵角の追従性悪化の指標値δerrが基準値δcよりも大きいときには、車両の目標状態量γtは目標舵角に基づく車両の目標状態量に設定され、これにより舵角の追従性悪化に起因する車両の走行ラインの目標走行ラインからのずれが車両の目標状態量に基づく走行運動の制御によって低減される。
(もっと読む)
電動パワーステアリング装置

【課題】簡素な構成にて、精度よく、且つ安定的に、左右の車輪速に基づく転舵角の推定による操舵角検出を行なうことが可能な電動パワーステアリング装置を提供すること。
【解決手段】マイコン21は、左右の車輪速Wr,Wlに基づいて、転舵輪に生じた転舵角θtを推定する転舵角推定部31と、転舵角θtをステアリングに生じた操舵角θsに換算する操舵角換算部32とを備える。そして、操舵角換算部32は、モータ12の回転角速度ωmに示される操舵速度に基づいて、その転舵角θtを操舵角θsに換算する際の換算係数を可変する。
(もっと読む)
電動パワーステアリング装置
【課題】路面から入力されるハンドル戻りを抑え、キックバックを抑制し、ドライバーへの負荷を軽減し、悪路走行においても良好な操舵フィーリングが得られる電動パワーステアリング装置を提供する。
【解決手段】車体の車輪速度を検出し、左右車輪速の差の大きさから悪路を判定し、アシスト特性に基づいて電動モータに流すモータ電流値を決定するアシスト制御手段の操舵補助指令値の応答性を高め、キックバックにより発生する入力トルクを打ち消すようにアシスト特性を高める。
(もっと読む)
車両挙動センサの中点学習方法と車両挙動検出システム
【課題】車両挙動センサの温度変化の影響を回避して車両挙動センサの中点学習ができる車両挙動センサの中点学習方法と車両挙動検出システムを提供する。
【解決手段】VSA_ECUは、エンジンルーム内に設置され、ヨーレートセンサSYと、ヨーレートセンサ温度TYを検出する温度センサSTYを有する。エンジン制御ECUから吸気温度を外気温度TAirとしてCAN通信50を介して取得する。中点学習条件成立判定部42は、中点学習条件を満たしていると判定した場合に、中点決定部43に中点学習許可の信号を出す。中点決定部43は、ヨーレートセンサ温度TYと外気温度TAirとの差が、予め決められた閾値未満のときは、ヨーレートセンサSYからの信号を中点値として取得して、学習中点記憶部44に出力して、記憶させる。ヨーレートセンサ温度TYと外気温度TAirとの差が、閾値以上の場合は、中点値として取得しない。
(もっと読む)
車両の舵角制御装置
【課題】良好な走行安定性を確保し得る車両の操舵制御装置を提供する。
【解決手段】車両の運転者のステアリング操作に応じて操舵対象車輪の車輪舵角を制御する車両の操舵制御装置において、車両のアンダーステア傾向の強さを示すアンダーステア状態量の増大に応じてステアリングギヤ比を大きくするためのアンダーステア状態量対応ステアリングギヤ比補正係数を設定し、当該設定されたアンダーステア状態量対応ステアリングギヤ比補正係数によって所定の標準ステアリングギヤ比を補正し、当該補正後のステアリングギヤ比とステアリング操作角とに基づいて操舵対象車輪の車輪舵角を演算し、操舵対象車輪の車輪舵角を検出し、上記演算された車輪舵角と上記検出された車輪舵角とが一致するように車輪舵角を制御する。
(もっと読む)
摩擦状態推定装置
【課題】 直進走行時や急旋回走行時等における誤推定を抑制した摩擦状態推定装置を提供する。
【解決手段】 ATTS−ECU16は、ステップS31で直進走行フラグFsr,急旋回走行フラグFft,急制動フラグFpb,オーバステアフラグFos,バンク走行フラグFbrが全て0であるか否かを判定し、この判定がYesであればステップS32で実ヨーレイトγrを標準ヨーレイトγeで除すことにより路面μの今回値μnを推定/出力する。一方、各フラグFsr,Fft,Fpb,Fos,Fbrのうち少なくとも1つが1であり、ステップS31の判定がNoとなると、ATTS−ECU16は、ステップS33で路面μの前回値μn−1を今回値μnとしてそのまま出力する。
(もっと読む)
油圧パワーステアリング
【課題】スネーキング現象の振動モードに陥ることを抑制する油圧パワーステアリングを提供する。
【解決手段】2つのシリンダ室23b、23cを有し、車両の前輪を操舵するハンドルの操舵力を補助する油圧シリンダ23と、2つシリンダ室23b、23cへのオイルの供給、排出を制御するロータリバルブ27とを有し、シリンダ室23bとロータリバルブ27との間を接続する配管Lに、通過するオイルの流量を制限可能な流量可変バルブ24を設け、車両が被牽引車を牽引しているときには、流量可変バルブ24を通過するオイルの流量を調整し、油圧シリンダ23の動きを抑制している。
(もっと読む)
車両制御装置
【課題】車輪速から得られる車両の走行状態情報を用いて車両挙動を制御することのできる車両制御装置を得る。
【解決手段】車両の左右車輪速と予め車両に応じて記憶されたスタビリティファクタと車両の車速とから車両の実ヨーレートを検出し、この検出した実ヨーレートとハンドル回転角等から得られる車両の基準ヨーレートとから車両の不安定状態を検出するようにしたもので、車両に標準的に装備されるABSの車輪速センサの情報から実際のヨーレート相当の信号を得るので、車両に高価なヨーレートセンサを装備する必要がなくなる。
(もっと読む)
車両用操舵制御装置
【課題】
μスプリット路において、制動力を付与した場合、運転者のカウンタステアの有無に関わらず、或いは、パニック状態でハンドルを保持した場合、制動力左右差による高μ路面側に車両が偏向することを抑えることができ、カウンタステアを促すことができる車両用操舵制御装置を提供する。
【解決手段】
第2ECU40は制動力差制御量とACT角度指令値を加算した値に基づき出力角を制御し、操舵輪FR,FLの舵角を制御する。第1ECU30は左右制動力差に起因するヨーモーメントが生じた際、カウンタステアアシスト電流指令値とアシスト電流指令値を含むEPS電流指令値との加算した値に基づき操舵輪FR,FLの転舵トルクを制御し、カウンタステアをするべき方向にトルクが足し込まれる。操舵輪FR,FLはカウンタステアをするべき方向に左右制動力差に応じて操舵される。
(もっと読む)
車両の回生制動制御装置及びそれを含む車両制御装置
【課題】回生制動が可能な車両に於いて、左右駆動力配分システムの如き複数の駆動輪の駆動力を各々独立に調節可能なシステムを搭載し、回生制動力の配分制御を実行して、車両のエネルギー効率を向上すること。
【解決手段】本発明の回生制動制御装置は、左右の駆動輪の回生制動力の配分が変更可能な車両に於いて、左右の駆動輪への回生制動力の配分量を決定する手段と、左右輪の各々で最大発生可能制動力を決定する手段とを含み、左右輪のうちの最大発生可能制動力が大きい方の車輪の回生制動力の配分量が増大される。また、配分制御に伴う駆動力配分システムの消費電力による損失を考慮して、配分制御実行によりエネルギー効率が向上する場合にのみ、配分制御が実行されるようになっていてよい。
(もっと読む)
1 - 10 / 42
[ Back to top ]