
国際特許分類[B62D109/00]の内容
処理操作;運輸 (1,245,546) | 鉄道以外の路面車両 (62,921) | 自動車;付随車 (46,083) | 運転者または操作者の存在,不在または不活動状態,例.クラッチ,ブレーキまたはスロットルの操作の検知によるもの (211)
国際特許分類[B62D109/00]に分類される特許
21 - 30 / 211
自律走行制御装置
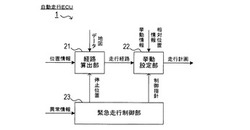
【課題】緊急時に車両の状態に応じてより迅速かつ的確な走行制御を行うことが可能な自律走行制御装置を提供する。
【解決手段】自律走行ECU1では、車両の周囲の状況(相対位置情報)に応じて走行計画を設定すると共に、他のECUからの異常情報に基づいて車両を緊急停止させる必要があると判定した場合には、制御系統の異常部位以外の特定部位である使用可能部位と予め設定された緊急停止モードとから一意に決まる制御指針に従って、車両を停止させるための走行計画を再設定する。しかも、車両における乗員および危険物の有無の少なくとも一方の情報に基づいて緊急停止モードを選択し、車内優先モードまたは車外優先モードのいずれかを走行計画の再設定に反映させることにより、緊急時の車内の状況に応じて、車両と車両の周囲とのいずれかの安全を的確に重視した制御を行うことが可能となる。
(もっと読む)
車両の操舵感改善装置

【課題】パワーステアリング構成部品の仕様変更や、新たな手段の追加なしに、運転者が感じる操舵を適切な重さにして、修正操舵を行うことのないような操舵感を実現する。
【解決手段】t1以後の操舵中、設定時間TM1s中のモータトルク増大補正と、設定時間TM2s中のモータトルク減少補正とを順次行い、車輪駆動力を、運転者が加減速を感じない程度に繰り返し増減させる。車輪駆動力の繰り返し増減は、ステアリングラックのスラスト増減量として示すような操舵力の増減を生起させる。操舵力が繰り返し増減される場合、運転者は全体としては大きい方(増大中)の操舵力を強く感じ、運転者が感じる操舵力の重さをモータトルク増減時間TM1s,TM2sの設定のみにより適切な重さにし得て、運転者が車両との一体感や安心感を持てるように操舵感を改善することができる。
(もっと読む)
車両の操舵時挙動改善装置
【課題】操舵時におけるヨーイング挙動の線形性およびロールの抑制を、サスペンション装置の変更なしに実現する。
【解決手段】モータ駆動トルクを操舵開始時t1から所定時間TM1sが経過するt2までの間、目標モータトルクよりも実線波形で示す量だけ増大された値に補正し、t2から所定時間TM2sが経過するt4までの間、目標モータトルクよりも実線波形で示す量だけ減少された値に制御する。t2〜t4間のモータトルク減少補正は車両のロール速度を速くする内外輪荷重変化を生じさせ、内外輪側ショックアブソーバ・ストローク速度VsaboutおよびVsabinが、モータトルク減少補正非実行時のVsabin'およびVsabout'よりも速くなる。これによりショックアブソーバの振動減衰力が大きくなり、当該期間においてロール角を小さくでき、操舵中の車体ロール感を改善することができる。
(もっと読む)
操舵制御装置
【課題】駐車時における操作性を向上させた操舵制御装置を提供する。
【解決手段】操舵制御装置10のECU40は自車両100の左前輪21〜右後輪24の操舵角を制御する。ECU40は、自車両100が駐車枠Pに平行ではないときは、左前輪21、右前輪22と左後輪23、右後輪24との操舵方向が異なる方向である逆相となるように制御する。逆相とすることにより自車両100の方向を変更しやすくなり、自車両100を駐車枠Pに平行にすることが容易となる。また、ECU40は、自車両100が駐車枠Pに平行であるときは、左前輪21、右前輪22と左後輪23、右後輪24との操舵方向が同じ方向である同相となるように制御する。同相とすることにより自車両100の方向を維持しつつ平行に移動させ、自車両100と駐車枠Pとの左右の間隙を調整することが容易となる。
(もっと読む)
車両の運動制御装置
【課題】具体的な制御指針をドライバに提示することにより、ドライバが自己の運転操作に対する指針を得られるような車両の運動制御装置を提供することにある。
【解決手段】中央コントローラ40の理想運動制御部42は、車両の前後方向の加加速度情報を用いて、車両の操舵を制御する。HVI(Human Vehicle Interface)55には、運転者に操舵を開始するタイミング決定のための情報が提示される。運転者は、HVI(Human Vehicle Interface)55により提示される情報に基づいて、操舵開始タイミングを制御する。情報提示手段は、運転者に操舵を開始するタイミング決定のための情報を提示する。情報提示手段により提示される情報に基づいて、運転者により前記操舵開始タイミングが制御される。
(もっと読む)
車両操作支援装置
【課題】運転における安全性を高めることが可能な車両操作支援装置を提供する。
【解決手段】車両挙動制御装置10は、自車両の運転操作を制御する車両操作支援装置であって、自車両のドライバのくしゃみといった所定の生理現象を検知する生理現象検知部1と、生理現象検知部1により所定の生理現象が検知された際に、ドライバによる所定の操作が行われたか否かを判定する操作量検知部3及び条件判断部5と、操作量検知部3及び条件判断部5により所定の操作が行われたと判定された場合に、所定の操作による自車両の挙動を緩和する緩和制御を行なう緩和制御部6と、を備える。これにより、ドライバのくしゃみといった所定の生理現象を原因とする意図しない急な所定の操作を原因とする急な車両挙動を緩和して運転における安全性を高めることが可能になる。
(もっと読む)
電動アクチュエータ制御装置およびこれを備えた車両の後輪トー角制御装置
【課題】後輪トー角制御装置において、作動量検出手段が故障した際に故障判定期間中に車両の走行フィールが悪化することを抑制する。
【解決手段】設定した制御指示値および作動量検出手段による実測値に基づいて電動アクチュエータ11を制御する後輪トー角制御装置10であって、ストロークセンサ17による実測値と制御指示値との差が所定の閾値S以上あり、且つストロークセンサ17による実測値が変化しない場合に故障が疑われる異常状態と判定し、異常状態が第1判定時間T1にわたって継続した場合にストロークセンサ17の故障と判定するものであり、異常状態が判定された場合、ストロークセンサ17の故障が判定される前に電動アクチュエータ11の作動を停止させるように構成する。
(もっと読む)
車両運動制御システム
【課題】単一の前輪とその前輪より車両後方側に配設された左輪および右輪とを有する車両に搭載されて車両の運動を制御するシステムの実用性を向上させる。
【解決手段】前輪12Fの車体10に対する平面視における位置を変更する前輪位置変更装置84Fを備え、その前輪位置変更装置84Fを制御するために制御装置が有する制御部を、車両の旋回時において、前輪12Fを、車両が直進する際の位置である直進時前輪位置から旋回外側に移動させるように構成する。本車両運動制御システムによれば、車両の旋回時に、前輪12Fの車体10に対する位置を旋回外側に変更することで、車両の斜め前方への転倒を防止することが可能となる。
(もっと読む)
車両用制御装置
【課題】操舵部材を操作して車両を旋回させるときに、運転者が違和感を覚えたり、操舵部材の切増しが必要になったりすることがないようにする。
【解決手段】車両のボディと、複数の車輪と、所定の車輪に配設され、車輪にキャンバを付与するためのキャンバ可変機構と、所定の車輪にキャンバが付与されているかどうかを判断するキャンバ付与状態判断処理手段と、所定の車輪にキャンバが付与されていると判断された場合に、操舵部材における操舵特性を、所定の車輪に付与されたキャンバに応じて変更する操舵特性変更処理手段とを有する。所定の車輪にキャンバが付与されている場合に、操舵特性がキャンバに応じて変更されるので、車両がアンダーステアの挙動を示すのを防止することができる。
(もっと読む)
電動パワーステアリング装置
【課題】操舵補助力に関して、運転者の意図に反応する電動パワーステアリング装置を提供する。
【解決手段】本発明の電動パワーステアリング装置は、アクセル開度の変化率、ブレーキ圧の変化率、及び、横加速度等の、車両の運転状況に関する複数のデータを取得するデータ取得部11mと、複数のデータをそれぞれ正規化してそれらの中から現在の最大値を求め、当該最大値を運転者の意図として判定する意図判定部11nと、操舵補助力を生じさせるにあたって、意図判定部11nによる判定結果に応じてアシスト特性を変更する制御部11kとを備えたものである。そして、意図判定部11nにより、運転者がどのような運転をしようとしているかについての意図を判定し、その判定結果に応じてアシスト特性を変更するので、運転者の意図に沿うように反応する操舵補助を行うことができる。
(もっと読む)
21 - 30 / 211
[ Back to top ]