
国際特許分類[B62D109/00]の内容
処理操作;運輸 (1,245,546) | 鉄道以外の路面車両 (62,921) | 自動車;付随車 (46,083) | 運転者または操作者の存在,不在または不活動状態,例.クラッチ,ブレーキまたはスロットルの操作の検知によるもの (211)
国際特許分類[B62D109/00]に分類される特許
11 - 20 / 211
駐車場の自動駐車システム
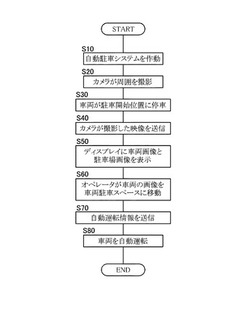
【課題】車両を、駐車開始位置から車両駐車スペースまで自動運転させて駐車できるようにする自動駐車システムの提供である。
【解決手段】車両8に搭載されたカメラ12が撮影した映像が、自動駐車センタ9の画像処理コンピュータ15に無線送信され、画像処理コンピュータ15は、カメラ12の映像から車両画像22と駐車場画像26とを作成し、ディスプレイ21に表示する。オペレータ25が模擬ステアリング23と模擬アクセルレバー24とを操作してディスプレイ21の車両画像22を駐車スペース画像27に駐車させたときのステアリング角度の変位とアクセルの変位とを車両8の自動駐車ECU13に無線送信し、車両8を駐車開始位置Pから駐車スペース5cまで自動運転させる。
(もっと読む)
車両の操舵力制御装置

【課題】制動制御によって操向車輪に制動力の左右差が発生している際における操向車輪のセルフアライニングトルクの変化を打ち消し得る車両の操舵力制御装置の提供。
【解決手段】この装置では、車両の運転者による制動操作に依存することなく車両の状態に基づく制動制御によって操向車輪に付与される制動力(Bq[f*])が調整される。車両の操舵操作部材に操舵力を付与する操舵力発生手段(TQ)が備えられる。制動制御によって操向車輪に付与される制動力(Bq[f*])の左右差(ΔBq)に基づいて、操舵力発生手段(TQ)により操舵操作部材に付与される操舵力が調整される。この操舵力は、操向車輪に付与される制動力(Bq[f*])の左右差(ΔBq)が大きいほど、より大きい値に調整される。
(もっと読む)
MDPSの自動フルターン作動制御方法
【課題】Uターンまたはフルターン時に操舵力を最小にすることができ、自動フルターンによってユーザの便宜性を増大することができるMDPSの自動フルターン作動制御方法を提供する。
【解決手段】本発明のMDPSの自動フルターン作動制御方法は、MDPSの自動フルターン作動条件を満たすか否かを判断する段階、MDPSの自動フルターン作動条件を満たす場合、MDPSをフルターンで操向する段階、MDPSの自動フルターン解除条件を満たすか否かを判断する段階、およびMDPSの自動フルターン解除条件を満たす場合、MDPSの自動フルターンを解除する段階を含み、MDPSの自動フルターン作動条件を満たすか否かを判断する段階は、MDPSの作動が正常であるかを判断する段階を含むことを特徴とする。
(もっと読む)
走行支援装置及び方法
【課題】車輌を走路内で走行させるように補助を行う際の車輌の操舵と車速の減速との調和を図り、車輌を安定的に走行させる技術を提供する。
【解決手段】車線境界を示す道路標示又は走行不可域を基準にして車輌の走行可能な走路を設定し、当該走路からの車輌逸脱時に、車輌を走路内で走行させるように補助を行う走行支援装置であって、車輌が走路を超えないための目標ヨーレートYtrgよりも実際のヨーレートYreaが小さい場合にその差△Yに応じて、車輌を走路内で走行させるように補助を行う際の車輌の操舵と車速の減速とを個別に制御する。
(もっと読む)
車両の制御装置
【課題】車両の走行環境や運転指向をより的確に反映した走行特性とすることによりドライバビリティを向上させる。
【解決手段】走行している車両の状態に基づいてパラメータ(指標)を求め、前記車両に搭載されているアクチュエータの制御量をそのパラメータに基づいて決定する車両の制御装置において、前記パラメータに対する前記制御量を複数のアクチュエータ毎に予め設定しておき、前記パラメータが求められた場合にその単一のパラメータに基づいて前記複数のアクチュエータ毎の制御量を求める(ステップS31,S32,S33)とともにその制御量に基づいて各アクチュエータを制御するように構成されている。
(もっと読む)
車両用挙動制御装置
【課題】カーブ進入時だけでなくカーブ内においてもドライバの危険感に合った減速制御を実行することができる車両用挙動制御装置を提供する。
【解決手段】自車がカーブ内に位置すると判定した場合には、減速制御において、接近離間状態評価指標KdBに基づいた第1修正目標相対速度算出式を適正道路境界距離とカーブ内適性道路境界距離との差分をもとに修正した第2修正目標相対速度算出式を用いて第2修正目標相対速度を算出する。
(もっと読む)
車両制御装置
【課題】個々のコントローラの冗長度を必要以上に上げることなく、システム全体でエラーをバックアップすることにより、簡潔なECUの構成で、低コストで、高い信頼性とリアルタイム性と拡張性とを確保した車両制御装置を提供する。
【解決手段】センサ信号を取り込むセンサコントローラと、センサコントローラが取り込んだセンサ信号に基づいて制御目標値を生成する指令コントローラと、指令コントローラから制御目標値を受けて車両を制御するためのアクチュエータを作動させるアクチュエータコントローラがネットワークで接続される車両制御装置であって、アクチュエータコントローラは、指令コントローラが生成する制御目標値に異常が生じたときには、当該アクチュエータコントローラが受信したネットワーク上のセンサコントローラのセンサ値に基づいて制御目標値に生成する制御目標値生成手段を有し、生成した制御目標値によってアクチュエータを制御する。
(もっと読む)
操舵力制御装置
【課題】車両姿勢が不安定になる状況下での車両の加速時あるいは発進時において、簡素な構成で適切な操舵補助力を付加でき、ハンドル取られなどの発生しない車両の安定性向上を図れる操舵力制御装置を提供する。
【解決手段】μスプリット路面上での車両発進時あるいは車両加速時において、左前輪または右前輪が空転したときの車両姿勢が不安定になる状況に対し、車両発進時あるいは車両加速時の車輪速センサにより検出した左前輪の車輪速と、車輪速センサにより検出した右前輪の車輪速と、左前輪と右前輪との車輪速差の変化率とをもとに、適切な操舵補助力を付加し、簡素な構成でコストの増加を招くことなく、μスプリット路面上での車両の発進時あるいは加速時におけるハンドル取られなどを回避して車両の安定性向上を図る。
(もっと読む)
車両用操舵制御装置
【課題】 運転者の意図しないステアリング操作を回避し、運転者に違和感を与えることのない車両用操舵制御装置を提供すること。
【解決手段】 運転者によって操舵されるステアリングの操舵状態に応じて操向輪を転舵する転舵手段と、ステアリングに操舵反力を付与する反力付与手段と、を備えた車両用操舵制御装置において、運転者の意図しない操舵操作が発生する状況を検出したときは、ステアリング操舵角の変化を抑制するように操舵反力を付与することとした。
(もっと読む)
車両の制御装置
【課題】シフトバイワイヤ機構によるパーキングレンジへの切替操作時における違和感の発生を抑制する車両の制御装置を提供する。
【解決手段】シフトバイワイヤ機構により非パーキングレンジからパーキングレンジへの切替操作が実行される際には、車両に前後方向の制動力を付与するようにステアバイワイヤ機構により車輪の方向を変化させる据え切り制御を実行するものであることから、Pスイッチ30等のシフト操作装置による操作から実際に切替が行われるまでのタイムラグにおける車両の前後方向の挙動を好適に抑制することができる。
(もっと読む)
11 - 20 / 211
[ Back to top ]