
国際特許分類[B62D117/00]の内容
国際特許分類[B62D117/00]に分類される特許
81 - 90 / 524
車両用運転操作補助装置、車両用運転操作補助方法および自動車
【課題】運転者に対し、より適切に車両の運転操作の支援を行うこと。
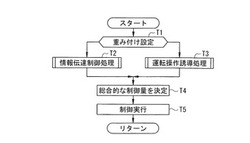
【解決手段】本発明に係る自動車では、情報伝達制御手段が、運転者の上下方向の動きを、リスクポテンシャルの大きさに応じて抑制して、外乱情報を運転者に伝達する制御量を算出する。擬似車両挙動発生手段が、リスクポテンシャルが増大する運転操作を行った場合の車両挙動を、動作制御手段を制御することによって擬似的に発生させるための制御量を算出する。協調制御手段が、情報伝達制御手段によって算出された制御量と、擬似車両挙動発生手段によって算出された制御量とに基づいて、車両を制御する。
(もっと読む)
車両用運転操作補助装置、車両用運転操作補助方法および自動車

【課題】運転者に対し、より適切に車両の運転操作のための情報を伝達すること。
【解決手段】本発明に係る自動車では、情報伝達制御手段が、運転者に入力される上下方向の動きを、リスクポテンシャルの大きさに応じて抑制して運転者に伝達し、リスク伝達手段が、リスクポテンシャルの大きさに応じて、操作反力付与手段における反力を付与する。
(もっと読む)
操舵制御装置
【課題】インバータの出力低下を少なくとも抑制しつつ、そのインバータの発熱を抑制できる操舵制御装置を提供する。
【解決手段】インバータ13bのPWM制御におけるキャリア周波数を、搬送波生成部28がインバータ温度Tiに応じて制御する。搬送波生成部28は、インバータ温度Tiが所定のキャリア周波数低減設定温度を超えているときに、インバータ温度Tiが所定のキャリア周波数低減設定温度以下であるときよりもキャリア周波数を低く設定することにより、インバータ13bにおけるスイッチング損失を低減して当該インバータ13bの発熱を抑制する。
(もっと読む)
電動パワーステアリング装置
【課題】路面状態に応じてダンピング力を可変制御する電動パワーステアリング装置を提供する。
【解決手段】操舵角センサ11と、操舵トルクセンサ12と、操舵トルクに基づいて補助操舵力に対応したベース電流を設定するベース電流設定部と、操舵角を微分することによって得られる操舵速度に基づき、操舵を減衰するダンピング力に対応するダンピング補償電流ベース値を設定するダンピング補償電流ベース値設定部31と、ラック軸の軸方向に加わる負荷をラック軸力として推定するラック軸力推定部33と、ラック軸力に基づいてダンピング力を補正するためのダンピング補正係数を設定するダンピング補正係数設定部とを有し、ダンピング補償電流ベース値にダンピング補正係数を乗じてダンピング補償電流を算出し、ベース電流とダンピング補償電流とに基づいて補助操舵力を発生させる。
(もっと読む)
車両用操舵制御装置
【課題】バッテリ電圧が低下した場合に、バッテリにかかる負荷を抑えつつ、操舵ハンドルの中立位置と転舵輪の車両直進位置との間のずれを補正する。
【解決手段】車両用操舵制御装置10は、操舵ハンドル12に連結された操舵軸14上に設けられ、転舵輪18に対して転舵角を与えるVGRSアクチュエータ20を備える。VGRS−ECU22は、バッテリ28の電圧が所定の第1閾値電圧以下になったことが検出されたときに、VGRSアクチュエータ20の回転角を固定する。そして、操舵ハンドル12が切り戻されているときに、VGRSアクチュエータ20の回転角が固定された際に発生した操舵ハンドル12の中立位置と転舵輪18の車両直進位置との間のずれを補正する。
(もっと読む)
車両用操舵装置
【課題】回転角センサを用いない新たな制御方式で駆動源としてのモータを制御する構成の車両操舵装置を提供する。
【解決手段】仮想回転座標系であるγδ座標系のγ軸電流Iγでモータが駆動される。γδ座標系は、制御上の回転角である制御角θCに従う座標系である。制御角θCとロータ角θMとの差は負荷角θLである。この負荷角θLに応じたアシストトルクTAが発生する。一方、操舵トルクTがフィードバックされ、指示操舵トルクT*に操舵トルクTを近づけるように、加算角αが生成される。この加算角αが制御角θCの前回値θC(n-1)に加算されることにより、制御角θCの今回値θC(n)が求められる。加算角αは、加算角リミッタ24による制限を受ける。手放し状態であると判定されたときには、リミッタゲイン設定部43およびゲイン乗算部44により、目標ヨーレートの絶対値|YR*|に基づいて、加算角リミッタ24の制限値が制御される。
(もっと読む)
駐車支援装置および駐車支援方法
【課題】トルクセンサを用いることなく、ドライバーによるステアリングの操作介入を判断する。
【解決手段】駐車位置に対する目標駐車経路に応じて設定される目標操舵角に基づいて電動モータ13を制御することにより、駐車時のステアリング操作が自動的に行われる。この場合、ステアリングの角加速度ω’に基づいて、ドライバーによるステアリングの操作介入が判断される。
(もっと読む)
運転操作支援装置及び運転操作支援方法
【課題】回避制御に対し運転者が感じる違和感を低減する。
【解決手段】マイクロプロセッサ10が、回避制御を実行するべきと判定した時点における自車両1の運転者の車両操作量に基づいて回避制御の動作範囲を設定し、設定された回避制御の動作範囲内で自車両1が障害物Oと接触することを回避する走行経路を回避経路として算出し、算出された回避経路に沿って走行するように運転者の車両操作を支援する。これにより、個々の運転者によって異なる回避操作の許容範囲を反映した回避制御を行うことができるので、運転者が回避制御に対して感じる違和感を低減することができる。
(もっと読む)
車両用運転操作補助装置、車両用運転操作補助方法および自動車
【課題】より運転者の意図に整合する運転操作支援を行うこと。
【解決手段】本発明に係る自動車では、制御仮値設定手段が、自車両のリスクが縮小する方向に車両制御手段における車両制御の仮値を設定し、仮値に基づいて車両制御手段が実行した車両制御に対する運転者の応答操作を応答検出手段が検出する。制御本値設定手段は、応答検出手段によって検出された運転者の応答操作に基づいて、車両制御の本値を設定する。
(もっと読む)
運転操作支援装置及び運転操作支援方法
【課題】回避制御に対し運転者が感じる違和感を低減する。
【解決手段】コントロールユニット13が、操舵操作から自律操舵制御へ切り換える時点における操舵角θnext及び操舵角速度ωnextから操舵角補正量及び操作角速度補正量を減算した値を運転者による操舵操作から自律操舵操作へ切り換える時点における目標操舵角及び目標操舵角速度として算出し、算出された目標操舵角及び目標操舵角速度となる回避操舵パターン上の時刻を算出する。そしてコントロールユニット13は、算出された時刻から回避操舵パターンに従って障害物に自車両が接触することを回避するための操舵制御を実行する。
(もっと読む)
81 - 90 / 524
[ Back to top ]