
国際特許分類[B62D117/00]の内容
国際特許分類[B62D117/00]に分類される特許
51 - 60 / 524
車両用ステアリング装置
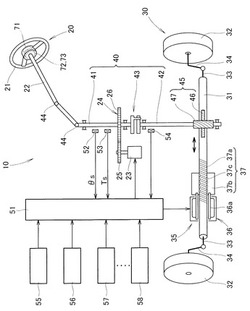
【課題】車両用ステア・バイ・ワイヤ式ステアリング装置において、ステアリングホイールの操舵角を容易に且つ確実に制限すること。
【解決手段】ステアリングホイール21に対して、転舵機構30を機械的に分離するとともに電気的には接続した車両用ステアリング装置10であり、ステアリングホイールに連結された第1回転軸41と、転舵機構に連結された第2回転軸42と、これら第1・第2回転軸同士を一定の相対的な回転角の範囲で互いに空転可能に連結する連結機構43とを有している。
(もっと読む)
電動パワーステアリング装置

【課題】簡素な構成にて、精度よく、且つ安定的に、左右の車輪速に基づく転舵角の推定による操舵角検出を行なうことが可能な電動パワーステアリング装置を提供すること。
【解決手段】マイコン21は、左右の車輪速Wr,Wlに基づいて、転舵輪に生じた転舵角θtを推定する転舵角推定部31と、転舵角θtをステアリングに生じた操舵角θsに換算する操舵角換算部32とを備える。そして、操舵角換算部32は、モータ12の回転角速度ωmに示される操舵速度に基づいて、その転舵角θtを操舵角θsに換算する際の換算係数を可変する。
(もっと読む)
ステアリングシステム
【課題】 回転伝達比が変化するステアリングシステムの操作フィーリングを向上させることを課題とする。
【解決手段】 操作力によって回転する操作側シャフトと、操作側シャフトの車輪側に配設された転舵側シャフトと、操作側シャフトの回転を転舵側シャフトに伝達する回転伝達機構と、転舵側シャフトの回転トルクを検出するトルク検出器と、車輪の転舵を助勢する助勢装置と、助勢装置の作動を制御する助勢力制御装置とを備えるステアリングシステムにおいて、助勢力制御装置は、転舵側シャフトの回転トルクから、回転伝達比に基づいて操作力を推定し、操作力に基づいて目標助勢力を決定し、目標助勢力に基づいて助勢装置の作動を制御する。このような制御により、回転伝達比が変化する場合においても、目標助勢力が操作力を基に決定され、操作フィーリングを良好に保つことが可能となる。
(もっと読む)
電動パワーステアリング装置
【課題】アンチロックブレーキ装置の作動時においても、安定的に、左右の車輪速に基づく転舵角の推定に基づき検出される操舵角を基礎としたパワーアシスト制御を実行することのできる電動パワーステアリング装置を提供すること。
【解決手段】操舵角検出部は、アンチロックブレーキ装置の作動時には、その転舵角θtの推定に基づく操舵角θsの検出を停止し、当該アンチロックブレーキ装置が作動する直前(前回の検出周期)において検出された操舵角θsの前回値θs_bを新たに検出された操舵角θsとする。
(もっと読む)
電動パワーステアリング装置
【課題】操舵補助力に関して、運転者の意図に反応する電動パワーステアリング装置を提供する。
【解決手段】本発明の電動パワーステアリング装置は、アクセル開度の変化率、ブレーキ圧の変化率、及び、横加速度等の、車両の運転状況に関する複数のデータを取得するデータ取得部11mと、複数のデータをそれぞれ正規化してそれらの中から現在の最大値を求め、当該最大値を運転者の意図として判定する意図判定部11nと、操舵補助力を生じさせるにあたって、意図判定部11nによる判定結果に応じてアシスト特性を変更する制御部11kとを備えたものである。そして、意図判定部11nにより、運転者がどのような運転をしようとしているかについての意図を判定し、その判定結果に応じてアシスト特性を変更するので、運転者の意図に沿うように反応する操舵補助を行うことができる。
(もっと読む)
モータ制御装置および車両用操舵装置
【課題】回転角センサを用いない新たな制御方式でモータを制御することができるモータ制御装置を提供する。
【解決手段】モータ制御停止・再開タイミング検出部41は、モータ制御を停止させるべきタイミングと、モータ制御停止後においてモータ制御を再開させるべきタイミングとを検出する。モータ制御停止処理部43は、モータ制御停止・再開タイミング検出部41によってモータ制御停止タイミングが検出されたときに、制限値ωmaxを0まで漸減させた後に、指示電流値Iγ*を所定値以下となるまで漸減させる。モータ制御再開処理部44は、モータ制御停止・再開タイミング検出部41によってモータ制御再開タイミングが検出されたときに、制限値ωmaxを0に固定した状態で、指示電流値Iγ*を所定値以上となるまで漸増させた後に、制限値ωmaxを所定値以上となるまで漸増させる。
(もっと読む)
後輪操舵装置
【課題】四輪操舵自動車で低速走行時にハンドル取られが生じた場合でも、車体の進行方向がハンドルが取られた方向へ助長されるのを抑制する。
【解決手段】操舵角速度算出部22aと、操舵角と操舵角速度とから操舵状態を判定する操舵状態判定部22bと、操舵角と車速とから後輪転舵の制御を決定する後輪転舵制御部22cと、操舵状態判定信号と後輪転舵信号とにより後輪の逆相制御のゲインを調整する逆相ゲイン調整部22dとを設け、操舵状態がハンドル取られ状態になったら逆相ゲインを小さくする。ハンドル取られによる車両の挙動が後輪の操舵増大により増大されてしまうことを抑制し得るため、低速走行時の前輪操舵走行状態でハンドル取られが生じても何等違和感が生じること無く運転し続けることができる。
(もっと読む)
電動パワーステアリング装置
【課題】電源電圧が低下した場合において、当該電圧の低下をより確実に抑制するとともに、アシスト可能領域を好適に維持することができる電動パワーステアリング装置を提供する。
【解決手段】マイクロコンピュータは、電源電圧の値が特定の閾値以下に低下した旨判断される場合、モータに印加される電力の値を通常時よりも小さな値に制限するべく昇圧制御する。この構成によれば、モータ特性の最大値付近で操舵補助を実施していた場合であれ、バッテリの電圧が低下した旨判断されるときには、昇圧回路の昇圧制御を通じてモータ電力が通常時よりも小さな値に制限される。このため、バッテリの電圧のさらなる低下がより確実に抑制される。また、大きな電力を必要としない操舵補助領域については継続して操舵補助を実行することが可能となる。
(もっと読む)
電動パワーステアリング装置
【課題】トルクセンサ異常時の代替的なアシスト制御時においても過剰アシストの発生を抑えて安定的にアシスト力付与を継続することのできる電動パワーステアリング装置を提供すること。
【解決手段】マイコン(セルフステア抑制制御部)は、過剰アシスト力により転舵がステアリング操作に先行する所謂セルフステアの有無を判定し、当該セルフステアが発生している場合には、抑制ゲインKslfとして「0」を演算することにより、その操舵系に付与するアシスト力を停止する。また、マイコンは、上記セルフステア判定及び抑制ゲインKslfの演算に先立って、ステアリング操作の状態(操舵状態)が「切り戻し」状態であるか否かを判定する。そして、切り戻し状態であると判定した場合(ステップ102:NO又はステップ103:NO)には、セルフステアの如何に関わらず、そのアシスト力付与を停止すべく抑制ゲインKslfを演算する(Kslf=0、ステップ104)。
(もっと読む)
車両制御装置、車両模擬装置、及びプログラム
【課題】ドライバにとって快適な車両運動を実現することができるようにする。
【解決手段】操舵トルクセンサ12によって、ドライバの操舵によるステアリングの操舵トルクを検出する。操舵初期状態である場合、車両運動目標設定部28によって、ドライバの操舵トルクの知覚いき値と、ドライバの視覚情報に基づく車両運動の知覚いき値とが対応した操舵トルクと車両運動との対応関係に基づいて、検出された操舵トルクに対応する車両運動を目標値として設定する。舵角目標算出部30によって、車両運動の目標値を実現する前輪の転舵角の目標値を算出する。舵角制御部32によって、前輪の転舵角の目標値が実現されるように、舵角アクチュエータ22の作動を制御する。
(もっと読む)
51 - 60 / 524
[ Back to top ]