
国際特許分類[B62D117/00]の内容
国際特許分類[B62D117/00]に分類される特許
21 - 30 / 524
車両および車両制御プログラム
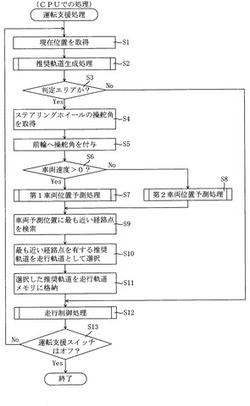
【課題】搭乗者の進行したい方向を正確に汲み取りながら走行予定軌道を選択して自動走行を行うことができる車両および車両制御プログラムを提供すること。
【解決手段】車両の搭乗者による回転操作によって車両の操舵方向が指示されるステアリングホイール13が設けられており、新たな走行軌道を選択して設定すべき判定エリアに車両1が位置した場合は、搭乗者によるステアリングホイール13の回転操作に基づいて、車両1が操舵され(S5)、その車両1の操舵に基づいて実際に車両1に発生したヨーレートを用いて所定時間後の車両位置を第1車両位置予測処理(S7)により予測する。これにより、車両1が走行している路面の傾きに左右されることなく、搭乗者の進行したい方向を正確に把握できる。よって、搭乗者の進行したい方向を正確に汲み取りながら走行軌道を選択して自動走行を行うことができる。
(もっと読む)
電動パワーステアリング装置の制御装置

【課題】操舵トルクに対して電流指令値が零に設定される不感帯が適正に設定できない場合でも、モータ電流零の状態を検出してモータ電流検出値のオフセット誤差を補正する電動パワーステアリング装置の制御装置を提供する。
【解決手段】電流指令値I、操舵トルクT、及び操舵速度Vを読み込み、操舵トルクTと電流指令値のコラム軸換算トルクTec(Tec=I×Kt ×G)との和P(P=T+Tec)を演算(P11、12)、値Pがコラム軸換算摩擦トルクTfc未満(P<Tfc)か否かを判定し、(P<Tfc)の場合はモータ電流零と見なせる状態が検出されたものと判定、その時点で検出されたモータ電流検出値iをオフセット補正値としてオフセット誤差の補正演算を行う(P13、15)。値Pがコラム軸換算摩擦トルクTfc未満(P<Tfc)でない場合はオフセット誤差の補正演算を中止する(P16)。
(もっと読む)
電動パワーステアリング装置およびこれを備えた車両
【課題】誤組判定を行うことで安価な電動パワーステアリング装置を提供する。
【解決手段】本発明の電動パワーステアリング装置は、車両1の操舵操作をアシストする電動パワーステアリング装置Sであって、運転者が操作するステアリングホイール3と、ステアリングホイール3の回転角度を検出するステアリングホイール回転角度検出手段と、車両1の転舵輪2l、2rを操舵するアシスト力を伝達するステアリングアシスト力伝達手段5と、ステアリングアシスト力伝達手段5に接続され、アシスト力を付与するモータ7と、モータ7の回転角度を検出するモータ回転角度検出手段と、モータ7を制御するステアリング制御手段8とを備え、ステアリング制御手段8は、ステアリングホイール3の回転角度とモータ7の回転角度とを基準減速比と比較し、ステアリングアシスト力伝達手段5とステアリング制御手段8とが適合しているか否かを判定する適合判定手段を有する。
(もっと読む)
車両の走行制御装置
【課題】車両挙動が安定した状態で且つドライバに違和感、不快感又は不安感を与えることなく軌跡制御を開始又は再開する。
【解決手段】車両の軌跡を該車両の運転者による操舵入力と無関係に変化させることが可能な軌跡可変装置を備えた車両における走行制御装置は、前記車両の軌跡が目標軌跡となるように前記軌跡可変装置を制御する軌跡制御手段と、前記車両の操舵速度を検出する操舵速度検出手段と、前記検出された操舵速度が、基準時間以上の期間について基準速度以下である場合において、前記軌跡制御手段による前記目標軌跡に応じた軌跡制御の実行を許可する許可手段と、車速が高い程低くなるように前記基準速度を設定すると共に車速が高い程長くなるように前記基準時間を設定する設定手段とを具備する。
(もっと読む)
電動パワーステアリング装置
【課題】ハンドル切り込み状態時における、快適な操舵フィーリングを得ることのできる電動パワーステアリング装置を提供することにある。
【解決手段】操舵トルクが所定値以上であり、かつ操舵トルクの微分値が0より大きい場合か、又は、操舵トルクが所定値以下であり、かつ操舵トルクの微分値が0より小さい場合には、切り込み状態と判定し、切り込み状態と判定した条件以外の場合には、切り戻し状態と判定する。そして、切り込み状態と判定した場合のみ、ダンパー補償制御、及び慣性補償制御を有効となるようにする。
(もっと読む)
車両の走行制御装置
【課題】ドライバ操舵との干渉による違和感を緩和しつつ、操舵入力情報を検出するデバイスの機能失陥時においても好適な軌跡追従性を確保する。
【解決手段】車両の走行制御装置は、車両の軌跡が目標路に近付くように舵角可変手段を制御する軌跡制御手段と、車両の運転者によりハンドルを介して操舵入力軸に与えられる操舵入力に関する操舵入力情報を取得する取得手段と、取得された操舵入力情報に応じて軌跡制御手段による軌跡制御の応答性を変更すると共に、操舵入力が取得出来ない場合に軌跡制御の応答性を向上させる応答性変更手段とを具備する。
(もっと読む)
車両の操舵制御装置
【課題】車両挙動の安定化に係る各種の後輪舵角制御を、車両挙動の安定化に効果的に活用する。
【解決手段】後輪舵角可変装置を介して後輪の舵角δrを変化させることが可能な車両を制御する車両の操舵制御装置は、前記後輪のスリップ角βrを特定する特定手段と、前記特定されたスリップ角の信頼度を判定する判定手段と、前記特定されたスリップ角と前記判定された信頼度とに基づいて、前記スリップ角が増加する方向への前記後輪の舵角の変化を制限する制限手段とを具備する。
(もっと読む)
モータ制御装置、および、これを用いた電動パワーステアリング装置
【課題】回転角検出手段を用いることなくモータを駆動し、このときのモータの巻線の異常を確実に検出できるモータ制御装置および電動パワーステアリング装置を提供する。
【解決手段】マイコン30は、第1駆動手段として機能し、トルクセンサ82により検出した操舵トルクに基づき加算角を演算し、当該演算により導出した加算角に基づきモータ10を制御する。マイコン30は、演算により導出した加算角に基づきモータ10を制御しているとき、第1異常検出手段として機能し、前記加算角、電流センサ81により検出した電流、および、インバータ部20に供給される第1制御信号(PWM制御信号)の値に基づき、モータ10の巻線の異常を検出する。
(もっと読む)
運転支援装置
【課題】自車両を効率的に走行させるような運転支援を実現することができる運転支援装置を提供する。
【解決手段】運転支援装置1のECU7は、自車両周辺の道路状況を認識する道路状況認識部24と、自車両の走行状態を予測する自車状態予測部26と、他車両の走行状態を予測する他車状態予測部27と、他車両に対する自車両のリスクポテンシャルマップを算出するリスクポテンシャルマップ算出部28と、自車両周辺の道路状況と自車両の走行状態と他車両の走行状態とに基づいて自車効率ポテンシャルマップを算出する自車効率ポテンシャルマップ算出部52と、リスクポテンシャルマップと自車効率ポテンシャルマップとに基づいて総合ポテンシャルマップを算出する総合ポテンシャルマップ算出部31と、総合ポテンシャルマップに基づいて操作反力を算出する操作反力算出部32とを有している。
(もっと読む)
電動パワーステアリング装置
【課題】トルクセンサが故障して操舵トルクを検出することができなくなった場合において、SAT(セルフアライニングトルク)が弱い極低速域での操作子の切り戻し時の操舵力を低減する電動パワーステアリング装置を提供する。
【解決手段】残留切り戻し角θsc3が残った状態で切り込み方向のアシスト電流Iaがゼロ値近傍となったときに回転角検出部により検出されている回転子回転角θscを基準角度θfとして切り戻し回転角θscを検出し、切り戻し回転角θscと特性102とに基づき、切り込み方向とは逆方向の切り戻し方向にモータを駆動するようにしたので、操作子の操作角が中立位置に近づく方向にアシストが可能となり、戻し側の操舵力を低減して、操作子を中立位置付近に戻し易くすることができる。
(もっと読む)
21 - 30 / 524
[ Back to top ]