
国際特許分類[B62D117/00]の内容
国際特許分類[B62D117/00]に分類される特許
61 - 70 / 524
車両用接触回避支援装置
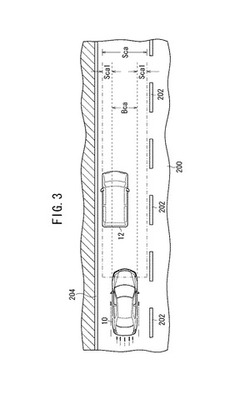
【課題】 自動ブレーキ制御と操舵アシスト制御の的確な協調制御を行う。
【解決手段】 自車(車両10)と自車前方の障害物(車両12)との相対位置を検出する相対位置検出手段により検出された障害物(車両12)との相対位置が、自車前方の第1領域Bca内にある場合には、自動ブレーキ制御を行い、検出された障害物(車両12)との前記相対位置が、第1領域Bca外の車幅方向に広い第2領域Sca内にある場合には、操舵アシスト制御を行うようにしたので、自動ブレーキ制御と操舵アシスト制御の的確な協調制御が実施される。
(もっと読む)
車両用操舵制御装置

【課題】トルクステアの影響を軽減し、ドライバの操舵負荷軽減と、安定した操舵状態の実現を可能とする車両用操舵制御装置を得ることを目的とする。
【解決手段】この発明による車両用操舵制御装置は、車輪速信号に基づいて演算したステアリング軸の回転に関連する第一のステアリング軸回転関連値と、ハンドル角信号に基づく第二のステアリング軸回転関連値とを比較し、前記比較の結果に基づいて前記車両に於けるトルクステアの発生の有無を検出するトルクステア検出手段を備え、前記トルクステア検出手段が前記トルクステアの発生を検出したとき、前記トルクステアを抑制するように前記アシストトルクを補正するようにしたことを特徴とする。
(もっと読む)
パワーステアリング機構
【課題】エンジンに直結された油圧ポンプにおける無駄な動力を削減することが出来て、車両の既存部品を生かして後付けが可能なパワーステアリング機構の提供。
【解決手段】油圧ポンプの吐出口(2o)と吸入口(2i)とを連通するバイパスライン(Lb)を有し、該バイパスライン(Lb)には流量調整弁(16)が介装されており、該流量調整弁(16)には制御装置(20)から開閉制御信号が入力され、制御装置(20)は、操舵角度センサ(18)が計測したステアリングの操作量と、操舵力センサ(19)で計測したパワーシリンダ(3)或いはナックルアーム(11)に作用する力とに基づいて、前記流量調整弁(16)を開閉制御する機能を有している。
(もっと読む)
車両接触回避支援装置
【課題】障害物との接触回避の支援制御において、路面摩擦係数を好適に推定することが可能な車両接触回避支援装置を提供する。
【解決手段】車両接触回避支援装置14の車両接触回避支援制御手段20は、左右の後輪24L、24R又は左右の前輪22R、22Lに対する制動力に基づく第1路面摩擦係数μ1と、左右の前輪22R、22L及び左右の後輪24L、24Rに対する制動力に基づく第2路面摩擦係数μ2とが異なる場合、第2路面摩擦係数μ2に基づき接触回避の支援制御を行う。
(もっと読む)
自動車のパワーステアリングシステムにおいて、ステアリングホイールのトルク設定値を決定するための方法
【課題】パワーステアリングシステムにおいて、自動車が如何なる状況にあってもドライバに快適な乗り心地を提供することができるように、各種のパラメータ及び情報に基づいて、トルク設定値又は荷重設定値を決定する。
【解決手段】トルク設定値又は荷重設定値は自動車の横加速度に基づいて決定され、横加速度は、主にラックに作用する推定荷重に基づいて決定され、さらに他の方法によって得られる横加速度を重み付けして決定されることが好ましい。
(もっと読む)
電動パワーステアリング装置
【課題】より適切なフィードバックゲインの変更を可能として良好な操舵フィーリングを維持しつつ静粛性の向上を図ることのできる電動パワーステアリング装置を提供すること。
【解決手段】モータ制御信号出力部には、F/Bゲイン演算部52が設けられており、F/B制御部によるフィードバック制御は、同F/Bゲイン演算部52が演算する比例ゲインKp及び積分ゲインKiを用いて行なわれる。そして、F/Bゲイン演算部52は、アシスト勾配α(の絶対値)が所定値α0以下である場合(|α|≦α0)には、そのフィードバックゲインを高く設定し(Kp=P0,Ki=I0)、アシスト勾配αが所定値α0を超える場合(|α|>α0)には、そのフィードバックゲインを低く設定する(Kp=P1,Ki=I1、P1<P0,I1<I0)。
(もっと読む)
ポンプ装置
【課題】直進走行時におけるポンプのエネルギ損失を抑制し得るポンプ装置を提供する。
【解決手段】電子コントローラ40により、少なくとも車速Vが第1所定車速以上である場合を直進走行状態とみなし、電磁弁16に与える指令電流を操舵角θ、操舵角速度ω及び操舵角加速度ωdの実際の検出値又は算出値に基づいて算出するのではなく、操舵角θ、操舵角速度ω及び操舵角加速度ωdを「0」として必要最小限の目標吐出流量から指令電流を算出して、これによって算出された指令電流をもって電磁弁16を介してカムリングの偏心を抑制するように制御したことにより、直進走行状態において僅かなステアリング操作やキックバック等の外乱によるステアリング動作等が発生した場合でも、ポンプの固有吐出量(吐出流量)が過敏に増加してしまうおそれがなく、当該ポンプのエネルギ損失の低減化に供される。
(もっと読む)
運転中に車両の運転者を支援する方法およびシステム
本発明は、運転者に所望の舵取り感を提供することによって運転中に車両の運転者を支援する方法に関し、前記車両は、手動操作舵取り装置(3)、少なくとも1対の地面係合部材(4)、および前記舵取り装置と前記地面係合部材との間の機械相互接続(5)を含む舵取り機構(2)を有する。前記方法は、舵取り角を検出する段階と、前記検出された舵取り角に基づいて所望の舵取り装置案内力を決定する段階と、前記所望の舵取り装置案内力に基づいて前記所望の舵取り感を前記運転者に提供する段階を含み、前記舵取り機構(2)内の弾性舵取り力伝達要素(10)の地面係合部材横の位置で前記舵取り角を検出する段階を含む。 (もっと読む)
運転中に車両の運転者を支援する方法およびシステム
この発明は、運転者に所望の舵取り感を提供することによって運転中に車両の運転者を支援する方法に関し、前記方法は、舵取り機構内の所望の摩擦を表わす部分を含む所望の舵取り装置案内力を決定する段階と、前記決定された舵取り装置案内力に基づく前記所望の舵取り感を前記運転者に提供する段階とを含む。 (もっと読む)
運転中の車両のドライバーを補助するための方法及びシステム
本発明は、現在の運転シナリオに基づいて望ましくない状況を回避するために、運転中の車両のドライバーを補助する方法であって、前記望ましくない状況を回避するために、車両操舵装置に対する第1案内力が望ましいか否かを予測するステップ、そして、第1案内力が望ましい場合には、前記望ましくない状況を回避するために前記操舵装置に付与されることになる前記第1案内力を含む合計案内力を予測するステップ、予測された合計案内力と限界値とを比較するステップ、そして、該予測合計案内力が前記限界値を超える場合には、前記望ましくない状況を回避するために前記操舵装置に前記予測合計案内力を付与すべきか否かを事前に決定するステップを特徴とする方法に関する。 (もっと読む)
61 - 70 / 524
[ Back to top ]