
国際特許分類[B66C15/04]の内容
処理操作;運輸 (1,245,546) | 巻上装置;揚重装置;牽引装置 (23,365) | クレーン;クレーン,キヤプスタン,ウインチまたはタツクル用の荷物係合要素または装置 (4,090) | 安全装置 (235) | 衝突を防止するためのもの,例.同一軌道上で運転しているクレーンまたはトロリー間での衝突 (21)
国際特許分類[B66C15/04]に分類される特許
11 - 20 / 21
ヤードクレーンの距離測定装置、ヤードクレーン、距離測定装置の光軸調整治具および距離測定装置の光軸調整方法
【課題】 赤外線などの不可視光を用いても光軸の調整を容易に行うことができるヤードクレーンの距離測定装置および、ヤードクレーン、距離測定装置の光軸調整治具および距離測定装置の光軸調整方法を提供する。
【解決手段】 不可視光を出射する光源部と、出射された不可視光を反射する反射部41と、出射された不可視光の反射を妨げる遮蔽部42とを有し、光源部から見た反射部41と遮蔽部42との相対位置が変更可能とされたターゲット22と、反射された不可視光を検出する検出部と、が設けられていることを特徴とする。
(もっと読む)
クレーン制御システム装置

【課題】 中抜き、中落し時に吊具もしくは吊具に保持されたコンテナと既存に積まれているコンテナとの衝突を防止または回避することができるクレーン制御システム装置を提供する。
【解決手段】 トロリーに設置されるものであって、あるコンテナの積み上げ/積み下ろしする位置に隣接する他のコンテナと前記あるコンテナとの空隙の中心の鉛直上方に配置された複数個の検出器(20A,20B)と、前記検出器が走査し検出する前記空隙方向の距離を演算し、前記あるコンテナと前記他のコンテナとの衝突を前記距離と規定値との比較に基づいて判断する第1の演算処理部(30)と、前記演算処理部(30)において衝突が判断された場合、クレーンの巻上または巻下速度を制限する第2の演算処理部(31)と、を備えた。
(もっと読む)
ジブクレーンの制御システム
【課題】現場状況や時間などの変化に応じて臨機応変に稼動範囲の切り替えをおこなうことで作業性と安全性の両方を確保することができるとともに、フックの高さの規制を切り替えることで立体的な制御が可能なジブクレーンの制御システムを提供する。
【解決手段】このタワークレーン5の稼動範囲を規制する制御システム1は、タワークレーン5のブーム位置及びフック高さを算出するための計測手段21a,21b,21cと、その計測手段からの出力を演算するクレーン側制御部23と、ブーム位置の平面視の稼動範囲及びフック高さを規制する複数の規制パターンを記憶する記憶部24,33と、前記規制パターンを切り替える規制切替スイッチ32と、ブーム位置を平面図上に表示するモニタ34と、規制パターンとブーム位置及びフック高さとを比較した結果を報知するモニタ34及びスピーカ35とを備えている。
(もっと読む)
搬送装置の衝突防止制御装置と方法
【課題】同一の走行レール上で往復動する搬送装置において、他機の移動前にその目的位置、移動方向、移動距離を高速かつ高い信頼性で検知でき、これに基づき、無駄な減速、停止、待機等を発生させずにリアルタイムで自機を制御でき、かつ他機に異常が生じた場合、他機を制御でき、これにより安全装置の多重化が可能となる搬送装置の衝突防止制御装置と方法を提供する。
【解決手段】同一の直線軌道3上を往復動する自機1及び他機2の搬送装置にそれぞれ搭載される搬送装置の衝突防止制御装置。この衝突防止制御装置は、自機と他機の離隔距離Aを非接触かつリアルタイムに直接検出する距離センサ12(レーザ距離計)と、自機と他機の目的位置、移動方向、移動距離を排他的かつリアルタイムに相互通信する相互通信装置14(パラレル光伝送装置)と、自機と他機の離隔距離と自機と他機の目的位置、移動方向、移動距離から、自機と他機の衝突を防止するように自機と他機を制御する走行制御装置16とを備える。
(もっと読む)
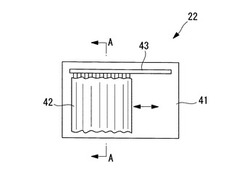
クレーン間衝突防止装置
【課題】 太陽光のセンサへの入射を防止することができ、センサの誤作動を防止することができるクレーン間衝突防止装置を提供すること。
【解決手段】 クレーンの隣接機同士の衝突を防止するクレーン間衝突防止装置であって、一のクレーンに取り付けられるセンサ43と、他のクレーンに取り付けられ、前記センサ43の投光部45から投光された光を、前記センサ43の受光部46に向けて反射させる反射部と備え、前記センサ43が、前記反射部の側に開口部を有する筐体44内に収容され、前記センサ43の前方側で、かつ前記筐体44の内側に、スリット48bが形成された遮光板48が配置されているとともに、前記反射部で反射された光が、前記スリット48bを介して前記センサ43の受光部46に入射されるように構成されている。
(もっと読む)
クレーン接近警報システム
【課題】クレーンの先端部の位置を正確に求めることのでき、ジブ同士が接近したときには確実に報知することのできるクレーン接近警報システムを提供する。
【解決手段】クレーン1,10のジブ2,12同士が互いに接近したとき報知するクレーン接近警報システムであって、各ジブの先端部に装着したGPSアンテナ3,13と、各GPSアンテナの受信データに基づいて各ジブの先端部の位置を求める演算手段4,6、14,16と、GPS補正情報を配信する配信サーバ22と、 演算手段との間や演算手段と配信サーバとの間でネットワーク23を介して情報の送受信を行う無線カード6,16と、各演算手段は、GPSアンテナの受信データと配信サーバから配信されるGPS補正情報とに基づいて各ジブの先端部の位置を求め、この求めた位置情報を互いにネットワークを介して送受信して、ジブ同士が接近したか否かを判断して、接近したとき報知する。
(もっと読む)
機器搬入出システム
【課題】設置が容易でしかも安価な移動クレーンによる機器、制御盤の搬入、搬出システムを提供する。
【解決手段】搬入、搬出建物近傍の固定位置に既知寸法の基準構造物(基準直方体、基準正方形、基準ポール)を設置し、既知寸法を持つクレーンにより吊り上げられた搬入、搬出品の各座標軸に関連した既知寸度とともに撮像する。取得された画像データに対して搬入或いは搬出位置、搬入或いは搬出品を画像上でマウス、ライトペン、キーボード等により指示することにより演算処理を施し、基準構造物および既知寸度の3次元の位置関係、即ち基準構造物と搬入、搬出位置の3次元距離、基準構造物と搬入、搬出品の3次元距離とを求めることにより、搬入、搬出品の目標値である搬入、搬出位置との3次元偏差を計測する。この偏差により、移動クレーンの各駆動部を制御する。
(もっと読む)
クレーン用の風安全装置
本発明は、特定の風速を超えるときにクレーン(2a、2b)が持ち上がって引き離されるのを防止するようにクレーン軌道(1)の領域に保持装置が係合しており、かつ少なくとも2機の隣接するクレーン(2a、2b)を走行装置(6)の領域で一緒に連結することができるように構成された、共用するクレーン軌道(1)上を走行装置(6)によって移動することのできる少なくとも2機の屋外クレーン(2a、2b)用、特にクローラ型フルガントリクレーン用の風安全装置に関する。高い風速が支配的であるために運転を停止されるクレーン(2a、2b)が持ち上がって引き離されるのを防止する高い安全性を達成するために、少なくとも2機の隣接するクレーン(2a、2b)が一緒に連結されているときに相互に寄りかかる少なくとも2機の隣接するクレーン(2a、2b)の連結器の上に、衝撃要素(10a、10b)を配設することを提案する。 (もっと読む)
コンテナヤード及びコンテナヤードの走行制御方法
【課題】 コンテナヤード内で、走行路の交差点に進入してくる複数のシャーシを円滑に走行させ、衝突などの危険を回避する。
【解決手段】 走行路16A,16Bの交差点40の上方には、交差点40に進入してくるシャーシ14A,14B,14C及びトランスファクレーン20の速度及び距離を検知するセンサ22A,22Bが配設される。交差点40の進入位置の側方には、信号装置42A,42B,42Cが配設される。センサ22AはCPU44に接続されており、検知された速度及び距離に基づき、走行させるシャーシ14A,14B,14C及びトランスファクレーン20の優先順位を速度、距離、待機時間の順で決定する。そして、決定した優先順位に従ってシャーシ14A,14B,14C及びトランスファクレーン20が交差点40を走行するように、信号装置42A,42B,42Cの点灯を制御する。
(もっと読む)
建設機械の安全装置
【課題】 騒音が発生する状況下でも、建設機械が障害物に近接している危険な状態を建設作業中のオペレータに確実に伝達することができる建設機械の安全装置を提供する。
【解決手段】 操作装置4a〜4fの操作レバーの操作により走行し、作業を行う建設機械に備えられ、建設機械周辺の作業者や物体等の障害物に建設機械が接触するのを予防する建設機械の安全装置を、操作レバーの操作時にその操作に抵抗するような力である操作反力を操作レバーに付与できる反力機構7a〜7fと、障害物が予め設定した危険範囲内に位置すると障害物検出器10a〜10cの検出結果に基づいて判定され、建設機械が障害物に接近する方向に操縦されていると操作レバーの操作信号に基づいて判定されたときに操作反力を操作レバーに付与するように反力機構7a〜7fを制御する制御ユニット9とを設けて構成した。
(もっと読む)
11 - 20 / 21
[ Back to top ]