
国際特許分類[E02F3/43]の内容
固定構造物 (153,614) | 水工;基礎;土砂の移送 (25,595) | 掘削;土砂の移送 (7,953) | 掘削機;土砂移送機械 (1,445) | 動力駆動によるもの (1,404) | ディッパーアームまたはバケットアームに取り付けた堀削具,例.ディッパー,バケット,を有するもの (1,029) | 構成部品 (920) | ディッパー,バケット,ディッパーアームまたはバケットアームの駆動体 (145) | ディッパーまたはバケットの位置の制御;駆動操作順序の制御 (145)
国際特許分類[E02F3/43]に分類される特許
81 - 90 / 145
作業機械

【課題】フロント作業装置の把持装置で把持した把持物と運転室の干渉を抑制することができる作業機械を提供する。
【解決手段】走行体1と、運転室2を有し走行体1上に旋回可能に設けた旋回体3と、旋回体3に対して俯仰動可能に設けた作業アーム8と、作業アーム8の先端に旋回可能に設けた把持装置9と、作業アーム8の姿勢を検出するブーム角度検出器71及びアーム角度検出器72と、これら検出器71,72からの検出信号θ1,θ2を基に作業アーム8のピン73の位置を演算する演算装置551と、演算装置551により演算されたピン73の位置が、把持装置9で把持する被把持物101の外形寸法を想定し被把持物101が運転室2に干渉し得る領域として設定された干渉防止領域200にあるとき、把持装置9の旋回動作速度及び作業アーム8の動作速度を制限する制限装置552とを備える。
(もっと読む)
作業車両

【課題】作業現場ごとに異なる積み込み作業の態様に適するように、エンジン出力を作業機及び走行装置に分配する。
【解決手段】エンジン21の出力を作業機のシリンダ13,15へ伝達する可変容量型油圧ポンプ27と、エンジン21の出力を走行装置のトルクコンバータ23へ伝達する可変クラッチ22と、ホイールローダの運転者が操作可能であって、作業機が作業を行っているときの走行装置の走行距離を調節するための作業設定ダイヤル60と、作業設定ダイヤル60が受け付けた入力に基づいて可変容量型油圧ポンプ27及び可変クラッチ22の可変度合いを制御するコントローラ200とを備える。
(もっと読む)
資材の載荷または掘削用車両を制御する方法およびシステム
車両250を制御する方法およびシステムは、車両250の少なくとも1つの車輪254に加えられた第1のトルクレベルおよび第2のトルクレベルを検出するトルク検出装置10を備える。第1のトルクレベルは、ブーム252の低い方のブーム位置に関連し、第2のトルクレベルは、低い方のブーム位置より高い、高架されたブーム位置に関連する。第1の油圧シリンダ14は、有効なトルクを第1のトルクレベルから高めるように、ブームを、低い方のブーム位置から上昇させることが可能である。第2の油圧シリンダ20は、たとえば、検出された第2のトルクレベルが第2のトルク閾値を満たすか、または超える場合、車両250に関連したバケット251を上方回転させ、またはひねるように適合される。 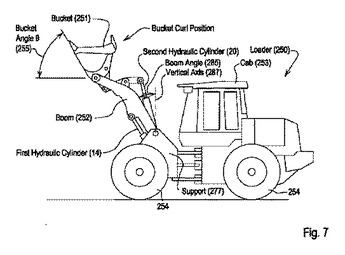 (もっと読む)
(もっと読む)
荷役車両の荷役装置
【課題】盛り土作業など低位置への荷積み作業を容易に短時間で行える。
【解決手段】車体にブームシリンダ16により上下方向に揺動自在に設けられた作業ブームと、作業ブームの先端部に荷役シリンダ18により前後方向に傾動自在に設けられたバケットと、ブームシリンダ16を駆動して作業ブームを上方に揺動させた時にブームシリンダ16から排出される圧油の一部を荷役シリンダ18に供給しバケットを前傾させてバケットを水平に保持するレベル保持装置31を具備し、レベル保持装置31に、作業ブームを上方に揺動した時に、ブームシリンダ16から荷役シリンダ18に供給する圧油量を調整する高速前傾バルブ52と、高速前傾バルブ52を操作する高速前傾スイッチ54とを有する高速前傾機構50を設けた。
(もっと読む)
掘削機の3D集積レーザおよび無線測位誘導システム
掘削機の3D集積レーザおよび無線測位誘導システム(Ex_3D_ILRPGS)は、掘削機(14)の2D水平座標を得るよう構成された移動無線測位システム受信機(12);掘削機のブーム(36)、スティック(38)およびバケット(40)の座標を得るよう構成されたバケット−機械本体測位システム(16);少なくとも1本のレーザビーム(26)を受信するよう構成され、実質的に高い精度で局所的な垂直座標を与えるよう構成されたレーザ検出器(24);移動無線測位システム受信機によって得られた掘削機の2D水平座標と、バケット−機械本体測位システムによって得られた掘削機のブーム、スティックおよびバケットの座標と、レーザ検出器によって得られた局所的な垂直座標とを受信して統合するよう構成され、実質的に高い垂直精度で掘削機のバケットの切刃を誘導するよう構成されたオンボードナビゲーションシステム(28)を含む。 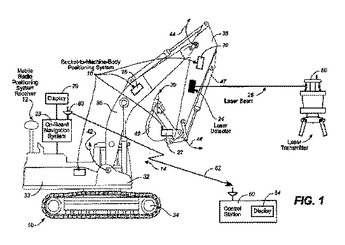 (もっと読む)
(もっと読む)
油圧ショベルのフロント制御装置
【課題】作業領域を設定して作業している場合の車体のジャッキアップを防止する。
【解決手段】フロント作業機10による掘削位置を検出する位置検出手段38〜41と、位置検出手段により検出された掘削位置がフロント作業機10の深さ方向の設定作業領域を超えないように油圧制御弁51,52の駆動を制限する制限手段30と、車体20のジャッキアップを検出するジャッキアップ検出手段41,30と、ジャッキアップ検出手段41,30によりジャッキアップが検出されると、ジャッキアップを抑制するように制限手段30,51,52による制限量を増加するジャッキアップ抑制手段30とを備える。
(もっと読む)
作業機械の周囲監視装置
【課題】作業機械の周囲の障害物の状況を運転者に適切に報知する。
【解決手段】作業機械71の周囲の障害物の作業機械に対する相対位置を検出する障害物検出手段31〜34と、障害物検出手段31〜34により検出された障害物を、所定時間以上停止している場合に静止障害物と判定し、所定時間以上停止していない場合には移動障害物と判定する障害物判定手段41と、障害物検出手段31〜34による検出結果と障害物判定手段41による判定結果とに基づき、静止障害物70に対応した静止障害物画像90、移動障害物72,73に対応した移動障害物画像92,93、および作業機械71に対応した作業機械画像91を、運転室内に設けられた表示用モニタに互いに異なった形態で表示する監視コントローラ40,45とを備える。
(もっと読む)
油圧ショベルの油圧駆動装置
【課題】従来の技術では着目されていなかった油圧回路中の圧油の残存エネルギーを利用して水平均し作業が効率的に行える油圧ショベルの油圧駆動装置を提供する。
【解決手段】
ブームシリンダ1及びアームシリンダ2と、両シリンダ1,2へ圧油を供給する主油圧ポンプ4と、ブームシリンダ1及びアームシリンダ2へ供給する圧油の流れをそれぞれ制御するブーム用方向制御弁7及びアーム用方向制御弁8と、アーム用方向制御弁8を作動油タンク6へ連結するタンク油路8cとを備えた油圧ショベルの油圧駆動装置において、タンク油路8cを選択的に閉鎖できる流量制御弁15を設けて、ブーム上げとアームクラウドの複合操作で水平均し作業をしている場合においてアームシリンダ2のロッド側の油圧が設定値以上に上昇したときに、流量制御弁15でタンク油路8cを閉鎖して作動油タンク8cへのアームシリンダ2のロッド側の圧油の流出を阻止し、同ロッド側の圧油をブームシリンダ1のボトム側へ供給するように構成した。
(もっと読む)
掘削・積込機械及び自動掘削方法
【課題】エンジンの出力を充分に高めながら、バケットが土砂に突っ込むときの衝撃を抑えることができるようにする。
【解決手段】ホイルローダ1には、レーザ距離センサ10が設けられており、このレーザ距離センサ10により、斜め下方にレーザ光11が照射されて、ホイルローダ1が前進走行しながら地面での照射位置P1までの距離L1を計測している。ホイルローダ1が掘削対象の土砂9に近づき、その計測距離L2が規定の距離Lsになると、指令によってホイルローダ1のエンジン(図示せず)の回転数がアップし、これとともに、この回転数を後輪6bに伝達する傾転量が制御されて、エンジンの回転数アップに伴うホイルローダ1の前進走行速度の上昇が抑えられる。これにより、バケット2が土砂9に貫入するときの衝撃が緩和される。
(もっと読む)
作業機干渉防止装置およびその制御方法
【課題】作業機と運転室との干渉を防止するとともに、運転室の近傍においても良好な作業性を得ることができる作業機干渉防止方法およびその制御方法を提供する。
【解決手段】作業機のブーム回転角、オフセット回転角、アーム回転角および作業機の寸法情報を用いて計算した作業機の先端位置を、作業機と運転室との干渉の有無に応じて定められる領域区分と照合して作業機の先端位置が属する領域を判定するとともに、作業機の先端位置から計算した作業機と運転室との距離に基づいてブーム上げ速度の上限値を計算し、このブーム上げ速度の上限値およびアーム回転角を用いてブーム上げ速度の上限値を再設定し、再設定したブーム上げ速度の上限値および作業機の先端位置が属する領域区分に応じて求められるブームの制御電流を少なくとも計算して出力する。
(もっと読む)
81 - 90 / 145
[ Back to top ]