
国際特許分類[E02F3/43]の内容
固定構造物 (153,614) | 水工;基礎;土砂の移送 (25,595) | 掘削;土砂の移送 (7,953) | 掘削機;土砂移送機械 (1,445) | 動力駆動によるもの (1,404) | ディッパーアームまたはバケットアームに取り付けた堀削具,例.ディッパー,バケット,を有するもの (1,029) | 構成部品 (920) | ディッパー,バケット,ディッパーアームまたはバケットアームの駆動体 (145) | ディッパーまたはバケットの位置の制御;駆動操作順序の制御 (145)
国際特許分類[E02F3/43]に分類される特許
41 - 50 / 145
制御システム、制御方法、操作制御装置及び作業装置
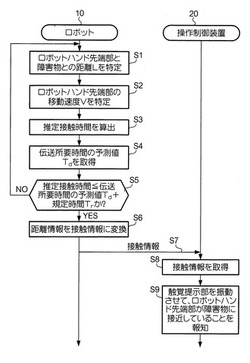
【課題】被制御体とその周辺にある障害物とが接近していることを操作者に伝えて遠隔制御に係る操作性を向上させる。
【解決手段】ロボット10は、ロボットハンド先端部とその周辺にある障害物との距離Lと、ロボットハンド先端部の移動速度Vを特定し(S1,S2)、ロボットハンド先端部が障害物に接触するまでの推定接触時間を算出する(S3)。ロボット10は、ロボットハンド先端部が障害物に接近している旨を通知する接触情報を操作制御装置20宛てに送信した時から、通信路を経由して接触情報が操作制御装置20に到達するまでの伝送所要時間の予測値Tdを取得する(S4)。ロボット10は、推定所要時間が予測値Tdと規定時間Trとの和以下になると(S5;YES)、接触情報を送信する(S6,S7)。これにより通信遅延の程度に関わらず、操作制御装置20は、現に接触がある前に接触情報に基づき両者の接近を報知する(S8,S9)。
(もっと読む)
作業アームの位置制御装置を備えた移動作業機械および移動作業機械の作業アームを位置制御する方法
本発明は作業アーム(6)の位置制御装置を備えた移動作業機械(1)に関する。本発明による移動作業機械(1)は、第1端が関節により前記作業機械(1)の上部旋回体(3)取り付けられた作業アーム(6)と、作業アーム(6)の第2端に取り付けられたツール(9)とを有している。上部旋回体(3)には少なくとも1つの傾きセンサが取り付けられており、作業アーム(6)には少なくとも1つの別の傾きセンサが取り付けられており、作業アーム(6)にはさらに少なくとも1つの回転速度センサが取り付けられている。移動作業機械(1)はさらに、前記少なくとも1つの傾きセンサの信号、前記少なくとも1つの別の傾きセンサの信号および前記少なくとも1つの回転速度センサの信号を処理するための計算ユニット(17)を有している。  (もっと読む)
(もっと読む)
建設機械

【課題】建設機械において、バケットチルトエンド位置付近での緩停止制御を行なうとともに、バケットチルトエンド位置付近での荷位置調整操作や暖機運転も行えるようにする。
【解決手段】高速バケットチルト操作が、バケットチルトエンド位置の近傍区間(B区間)より遠い位置(A区間)で開始された場合には、バケットが上記B区間に入った時点からバケットチルトの速度を強制的に減速するよう、緩停止制御を行う。他方、高速バケットチルト操作がB区間内の位置(S点)で開始された場合には、緩停止制御による減速開始位置(T点)を、高速バケットチルト開始位置(S点)より所定のオフセット距離分だけバケットチルトエンド位置に近い位置にずらす。さらに、高速バケットチルト操作が、バケットチルトエンド位置にほぼ相当する位置(C区間)で開始された場合には、緩停止制御を実行しない。
(もっと読む)
掘削支援装置および掘削支援方法
【課題】建設機械による直線掘削を簡便に且つ精度良く行うことができる掘削支援装置を提供する。
【解決手段】建設機械を用いた掘削作業を支援する装置であって、掘削箇所近傍に設置され、レーザ光を基準面Sに沿って出射する投光器2と、レーザ光を受光する受光部を長手方向に沿って複数有し、アーム4に取り付けられる受光器11と、アーム4の傾斜角度を検知する傾斜センサ12と、受光器11及び傾斜センサ12の検出信号に基づいて基準面Sからバケット3先端までの実際の掘削深さH1を演算し、これを予め設定された指定掘削深さH3と比較して掘削誤差H2を求める制御部とを備える。
(もっと読む)
ブームスイング式油圧ショベル
【課題】 アーム先端までの前方旋回半径を小径とし得るようにしたブームスイング式油圧ショベルを提供する。
【解決手段】 走行体1に旋回可能に配置された旋回体2と、旋回体2に配置された運転室3と、旋回体2にスイング及び起伏可能に枢支されたブーム7と、ブーム7の先端に垂直面内を回動し得るよう枢支されたアーム9と、アーム9の先端に垂直面内を回動し得るよう枢支されたバケット11とを備えたブームスイング式油圧ショベルであって、ブーム7がスイングするスイング中心点を、平面視で旋回体2の左右何れか一側に、運転室3の旋回体2幅方向中心側側部に位置するよう設け、ブーム7のスイング及び起伏を油圧シリンダ8により行うようにし、油圧シリンダ8の作動を油圧回路及びシーケンス回路を用いて行うよう構成する。
(もっと読む)
掘削支援装置および掘削支援方法
【課題】建設機械による直線掘削を簡便に且つ精度良く行うことができる掘削支援装置を提供する。
【解決手段】建設機械を用いた掘削作業を支援する装置であって、掘削箇所近傍に設置され、レーザ光を基準面Sに沿って出射する投光器2と、レーザ光を受光する受光部を長手方向に沿って複数有し、アーム4に取り付けられる受光器11と、アーム4の傾斜角度を検知する傾斜センサ12と、受光器11及び傾斜センサ12の検出信号に基づいて基準面Sからバケット3先端までの実際の掘削深さH1を演算し、これを予め設定された指定掘削深さH3と比較して掘削誤差H2を求める制御部とを備える。
(もっと読む)
作業機のアーム位置制御システム
【課題】アームを目標停止位置の近傍に安定的に停止させることができるようにする。
【解決手段】アーム用停止弁26は、操作弁27からのパイロット油をアーム用制御弁25に供給する供給位置と操作弁27からのパイロット油を遮断してアーム用制御弁25に供給しない非供給位置とに切り替わる2方向切換弁とされ、当該2方向切換弁のパイロット油の導入ポート33側又は吐出ポート側に当該パイロット油の油温を測定する油温センサ30が設けられ、制御部32は、油温センサ30の油温におけるアーム用油圧シリンダ23の動作遅れに基づいてアーム19を設定位置に停止させるべく2方向切換弁の非供給位置への切換動作を決定するアーム位置制御手段35を備えている。
(もっと読む)
作業機械及びピン型ロードセル
【課題】荷重の作用方向が変化しても高精度な測定が可能で安価に製造できるピン型ロードセルと、そのピン型ロードセルを備えた作業機械を提供する。
【解決手段】リンク機構部204のピン4Aとして利用され種々の方向から作用する荷重を検出するピン型ロードセル4を備える作業機械200において、ピンの軸方向に設けられたピン穴4Bと、ピン穴の壁面又はピンの外周における同一周上に位置し、かつ互いに直交する2面に取り付けられた2つのひずみセンサ8,9とを備え、ピン穴の径4D/ピンの外径4Cの値を0.2以下とする。
(もっと読む)
建設機械の干渉防止装置
【課題】2台の建設機械を並設して作業を行う場合、能率良く作業を行うことができ、かつ作業用アタッチメントどうしの干渉を確実に防止しうる建設機械の干渉装置を提供する。
【解決手段】各建設機械の作業用アタッチメントの旋回位置をそれぞれセンサ素子38a〜38d等の旋回位置検出手段により検出する。旋回範囲設定手段により、相手側建設機械の反対側において、左右両方向の旋回動作を許容し、旋回許容範囲から旋回終点を超えると旋回許容範囲側へ復帰する旋回動作のみ許容する。減速範囲設定手段は各旋回許容範囲の両端の2つの旋回終点の手前にそれぞれ減速範囲を設定する。旋回方向検出手段により出力される旋回方向について、旋回位置検出手段により検出される旋回位置が減速範囲に至ると旋回モータを減速させる。減速旋回中に旋回位置検出手段により旋回終点が検出されると、旋回停止手段により旋回モータを停止する。
(もっと読む)
油圧ショベルの干渉防止装置
【課題】油圧ショベルの干渉防止装置としての安全性を維持しつつ、使い勝手を向上し、作業効率を向上する。
【解決手段】バケット101cの先端が減速領域Aを超えて停止領域Bに達すると、制御ユニット32は、電磁比例減圧弁33a,33b,33cの対応するものを全閉して油圧システムを動作不能とし、フロント作業機102の動作を自動停止させる。フロント作業機102のバケット101cが更に危険領域Cに侵入すると、制御ユニット32は油圧ロック弁34を切り換えて油圧システムを動作不能とし、油圧ショベルの全動作を停止させる。同時に、危険領域Cへの侵入距離を計算し、その侵入距離に応じて停止領域Bの反危険領域C側の境界線E2を外側に移動して停止領域Bを拡大するよう補正する。補正した境界線E2が限界域E2limitに達するとそれ以上の補正を禁止し、警報装置36を鳴らす。
(もっと読む)
41 - 50 / 145
[ Back to top ]