
国際特許分類[E02F3/43]の内容
固定構造物 (153,614) | 水工;基礎;土砂の移送 (25,595) | 掘削;土砂の移送 (7,953) | 掘削機;土砂移送機械 (1,445) | 動力駆動によるもの (1,404) | ディッパーアームまたはバケットアームに取り付けた堀削具,例.ディッパー,バケット,を有するもの (1,029) | 構成部品 (920) | ディッパー,バケット,ディッパーアームまたはバケットアームの駆動体 (145) | ディッパーまたはバケットの位置の制御;駆動操作順序の制御 (145)
国際特許分類[E02F3/43]に分類される特許
61 - 70 / 145
作業車両
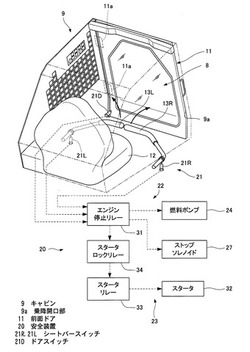
【課題】前面ドアを有するキャビンを搭載した作業車両の安全性を、簡易な構成で向上させる。
【解決手段】キャビン9の前面に形成された乗降開口部9aに前面ドア11を開閉自在に設け、エンジンにより駆動される油圧ポンプと、油圧ポンプから供給される作動油により駆動されるブームシリンダおよびバケットシリンダを設け、前面ドア11の開閉を検出するドアスイッチ21Dと、当該ドアスイッチ21の前面ドア11の開放信号によりエンジンへの燃料の供給を停止するエンジン停止手段22と、ドアスイッチ21Dの前面ドア11の開放信号によりエンジンの始動許可を停止する始動停止手段23とを有する安全装置20を設けた。
(もっと読む)
作業用機械における干渉防止装置

【課題】干渉防止領域へのアタッチメントの侵入を規制する干渉防止装置を設けるにあたり、作業現場の広狭や、アタッチメントのバリエーション等に応じて、オペレータが任意に干渉防止領域を設定できるようにする。
【解決手段】干渉防止制御装置16に、オペレータが干渉防止領域(侵入禁止領域Aおよび減速領域B)の外側境界線LA、LBとして設定したい位置にアタッチメント9を移動せしめることに基づいて、任意に干渉防止領域を設定することができる任意干渉防止領域設定部25を設けた。
(もっと読む)
建設機械
【課題】建設機械の油圧アクチュエータを使った作業において、エネルギーのロスを減少させる。
【解決手段】ブームと、ブームに取り付けられたバケットを有する建設機械において、バケットレバーがチルト位置になっていて(S24:Yes)、かつ、バケットがチルトエンドになっているとき(S26:Yes)、コントローラは、方向制御弁を制御してバケットシリンダへの圧油の供給を停止させる。
(もっと読む)
作業機械における干渉防止制御装置
【課題】キャブおよび作業装置の一方が動いている最中に他方を動かしても作業装置のツールとキャブとの干渉を防止でき、作業能率を向上できる干渉防止制御装置を提供する。
【解決手段】キャブを可動的に設けた作業機械にて、キャブ位置を検出するキャブ位置センサ43と、作業装置先端のツール位置を検出するブーム角センサ41およびアーム角センサ42をコントローラ77に接続する。作業装置を作動するブームシリンダ23およびアームシリンダ26の動作を規制する電磁比例弁71〜74をパイロット操作式コントロール弁47のパイロット通路中に設け、それらのソレノイドをコントローラ77に接続する。コントローラ77は、キャブ位置センサ43で検出したキャブ位置と微分演算したキャブ移動速度から移動ベクトルを求め、一定時間後のキャブ位置を予測し、その予測位置とツール位置とが干渉しないように電磁比例弁71〜74によりブームシリンダ23およびアームシリンダ26を制御する。
(もっと読む)
作業機械における干渉防止制御装置
【課題】ツール位置に応じてキャブの動きを規制することでキャブがツールと干渉することを防止でき、作業能率を向上できる作業機械における干渉防止制御装置を提供する。
【解決手段】可動的に設けたキャブ位置を検出するキャブ位置センサ43と、作業装置先端のツール位置を検出するブーム角センサ41およびアーム角センサ42をコントローラ77に接続する。キャブ昇降シリンダ32の動作を規制する電磁比例弁75,76をパイロット操作式コントロール弁47のスプール50のパイロット通路中に設け、それらのソレノイドをコントローラ77に接続する。コントローラ77は、キャブ位置センサ43により検出したキャブ(キャブ干渉域)の位置と、ブーム角センサ41およびアーム角センサ42により検出したツールの位置から、それらの位置関係に基づきキャブとツールとが干渉しないように電磁比例弁75,76によりキャブのアクチュエータ動作を制御する。
(もっと読む)
建設機械
【課題】積み込み作業を補助して、オペレータの負担軽減を図る。
【解決手段】ブーム5の上昇を指示するポジション、下降を指示するポジション及び中立を指示するポジションをとり得るブームレバー13と、バケット3のチルトを指示するポジション、ダンプを指示するポジション及び中立を指示するポジションをとり得るバケットレバー11と、ブームレバー13及びバケットレバー11のポジションを検出して、検出されたポジションに従ってブーム5及びバケット3を制御するコントローラ1と、を備える。コントローラ1は、ブームレバー13がブーム5の上昇を指示するポジションにセットされていて、ブーム5を上昇させているときに、ブームレバー13に対して所定の操作が行われたことを検出すると、バケット3をダンプさせるように制御する。
(もっと読む)
重機の高さ制限装置
【課題】重機の作業機が既設高架物に接触する危険を超音波センサを利用して容易かつ確実に回避できる高さ制限装置を提供する。
【解決手段】バックホウ浚渫船1におけるバックホウ3の運転室7の外側面に、作業機6のブーム8の揺動範囲に向けて超音波センサ13を設置すると共に、該超音波センサ13の感知エリアS内にブーム8が侵入したことを検出して警報音を発する警報発生手段(警報器16)を運転室7内に設置する。既設高架物12の下方に設定した危険ラインLに作業機6が到達したときのブーム8の位置に感知エリアSを合せておくことで、作業機6が危険ラインLに到達すると警報器16から警報音が発し、これによって、運転者Mは、直ちに既設高架物12に対する作業機6の接触を回避する操作を行うことができる。
(もっと読む)
油圧ショベルのフロント制御装置
【課題】効率よく領域制限制御ができる油圧ショベルのフロント制御装置を提供する。
【解決手段】アーム1b、バケット1cの実際の角速度を基にしてバケット先端の速度ベクトルVcを演算し、これから減速ベクトルVRを演算してブーム1aを制御することで、バケット先端が設定領域に沿って動作する領域制限掘削制御を行う。また、フロント作業機1Aのバケット1cの先端を下げるような操作指示がなされているにもかかわらず、バケット1cの先端位置が以前の位置と同じであると判断されると、領域制限制御の設定値(掘削領域の直線式)を補正するように構成した。
(もっと読む)
2段折れ式高所解体機の作業範囲規制装置
【課題】解体作業モードにおいて安定性が確保された転倒限界作業半径内で安心して高所解体作業及び低所解体作業を行ない、またバックホウ作業モードにおいて低所解体作業よりも広く且つ、深い地下位置に至るまで安定性が確保された転倒限界作業半径内で安心してバックホウ作業を行うことができる2段折れ式高所解体機の作業範囲規制装置を提供することを目的とする。
【解決手段】本発明は上記目的を達成するために、破砕機8を装着したときの解体作業モードを選択する解体作業モードスイッチ15aと、バケットを装着したときのバックホウ作業モードを選択するバックホウ作業モードスイッチ15bと、ブーム5の下げ角度を検出するとともに該下げ角度を作業モードに応じた設定下げ角度に規制するブーム角度検出スイッチ11と、アーム7の開き角度を検出するとともに該開き角度を作業モードに応じた設定開き角度に規制するアーム角度検出スイッチ12とを有する2段折れ式高所解体機の作業範囲規制装置を提供するものである。
(もっと読む)
浚渫における施工管理方法
【課題】バックホウ浚渫船によって水底土砂の浚渫施工を行なう際に、高い浚渫精度の施工が可能で、しかもバックホウのオペレータの操作が容易であって、効率的な浚渫施工が可能となる浚渫における施工管理方法を提供する。
【解決手段】バックホウ浚渫船による浚渫時に、バックホウの操縦室内の表示機器のモニタ画面上に、事前に測量した地形データや事前設定の目標浚渫線を描画し、バックホウの爪先の軌跡を短時間保持可能とし、バックホウのブームとアームとバケットをその表示機器のモニタ画面上にリアルタイムに表示する浚渫における施工管理方法。
(もっと読む)
61 - 70 / 145
[ Back to top ]