
国際特許分類[E02F3/43]の内容
固定構造物 (153,614) | 水工;基礎;土砂の移送 (25,595) | 掘削;土砂の移送 (7,953) | 掘削機;土砂移送機械 (1,445) | 動力駆動によるもの (1,404) | ディッパーアームまたはバケットアームに取り付けた堀削具,例.ディッパー,バケット,を有するもの (1,029) | 構成部品 (920) | ディッパー,バケット,ディッパーアームまたはバケットアームの駆動体 (145) | ディッパーまたはバケットの位置の制御;駆動操作順序の制御 (145)
国際特許分類[E02F3/43]に分類される特許
51 - 60 / 145
建設機械の油圧回路及び同回路に使用する減圧弁
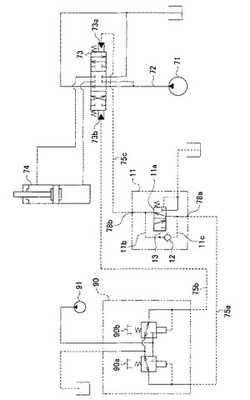
【課題】油圧シリンダの伸張操作から中立状態に戻したときに減圧弁のスプールの復帰が遅れによる油圧シリンダの停止の遅れを防止すること。
【解決手段】減圧弁11の2次側ポート78bと一方のパイロットポート73aとを結ぶ第2パイロット油路75cと、減圧弁11の1次側ポート78aと一方のリモコン弁90の出力ポートを結ぶ第1パイロット油路75aとに減圧弁11を挟んで該減圧弁11に並列な分岐油路11cを設け、該並列な分岐油路11cにパイロットポート73aからリモコン弁90の出力ポートにパイロット圧油が流れる向きにチェック弁12を介装した。
(もっと読む)
作業機のフロート制御システム

【課題】アームにおけるフロート制御を行うにあたって、そのフロート動作をスムーズ且つ確実に行うことができるようにする。
【解決手段】コントローラ75は、アーム22をフロート動作させるためのフロートモード76を備え、コントローラ75には、切換装置65を動作させるフロートスイッチ77が接続され、コントローラ75のフロートモード76は、アーム用油圧アクチュエータ26のボトム側の圧力が所定値以下となったときにおいてフロートスイッチ77の操作を行ったときに切換装置65の開動作を許可する。
(もっと読む)
作業機の油圧システム
【課題】 接続した油圧アクチュエータに対応して確実に作動油を流すことができるようにする。
【解決手段】 操作手段83に応じてハイフロー弁51における作動油の増量を制御するコントローラ75と、このコントローラ75に接続されていて運転席の周辺に設けられた報知手段85とを備える。コントローラ75には、操作手段83によるハイフロー弁51の増量制御を有効又は無効に切り換えるハイフロースイッチ84が接続されている。コントローラ75は、接続装置50に増量油路uからの作動油の増量が不要の油圧アクチュエータ34bが接続されていて、且つ、ハイフロースイッチ84によってハイフロー弁51による増量制御が有効になっているときに、報知手段85による警告を作動させる。
(もっと読む)
建機車輌における荷役作業機の傾き角度の自動制御装置
【課題】このリフトアームを上向き回動させて荷役用バケットによる荷役作業を行うときに、その荷役用バケットを略水平な姿勢に保持せしめるようリフトアームに対し傾斜回動させるよう行う荷役用バケットの傾斜角度の操作制御が、付設に取付空間を要するリフト機構を用いることなく、格別に取付空間を要しないで、リフトアームを回動させたときにそれに連動して、自動的に、荷役用バケットを略水平な姿勢に回動させる制御作動が適確に行えるようにする。
【解決手段】リフトブームを回動させるリフトシリンダと荷役用バケットを回動させるバケットシリンダとを、略同容積に構成してリフトブームを回動させるリフトシリンダの油圧回路と、荷役用バケットを回動させるバケットシリンダの油圧回路とを、リフトシリンダに送給された圧油の戻り油が、バケットシリンダに送給されて該バケットシリンダを経てタンクに戻るよう接続回路により接続する。
(もっと読む)
オフセット式作業機
【課題】作業アタッチメントがフロント機構の減速停止制御を行なう減速領域に侵入した状態にあって、作業アタッチメントを左右方向に揺動させたときでも、オフセットシリンダの減速停止制御を実現させることができる。
【解決手段】干渉防止用指令値演算手段35と、オフセットシリンダ用指令値演算手段44とを備えるとともに、干渉防止用指令値演算手段35から出力される指令値と、オフセットシリンダ用指令値演算手段44から出力される指令値とを比較し、バケット12が減速領域Yに侵入した状態でオフセットシリンダ8が駆動されるときには、オフセットシリンダ用指令値演算手段44から出力される指令値と干渉防止用指令値演算手段35から出力される指令値のうちの値の小さい方の指令値を、電磁比例弁22を切り換え制御する目標指令値に選定する指令値選定手段45を備えた構成にしてある。
(もっと読む)
ハイブリッド建設機械の制御装置
【課題】 旋回モータRMの単独操作におけるブレーキ時に、そのエネルギーを回収して発電をし、エネルギーの有効活用を図る。
【解決手段】コントローラCは、中立状況検出手段(6,8,9,11および16,18,19,21)の検出信号に基づいて上記回路系統のすべての操作弁1〜5,12〜15が中立位置にあると認識し、かつ、ブレーキ圧検出用の圧力センサー49の圧力信号があらかじめ設定された圧力に達したとき、通路抵抗制御手段(51)を介して安全弁50による通路抵抗を少なくする機能と、傾角制御器36を介して流体モータHMの傾転角を制御する機能と、通路抵抗制御手段を制御して保った通路抵抗と流体モータの傾転角との両者を相対的に制御して旋回モータのブレーキ圧を維持する機能とを備えている。
(もっと読む)
作業用機械における干渉防止装置
【課題】運転室とアタッチメントとの干渉を防止する干渉防止装置が設けられた作業用機械において、該作業用装置の輸送時に、干渉防止制御を解除しなくてもよいようにする。
【解決手段】 アタッチメント軸支位置Poが解除高さCよりも上方に位置している状態では、干渉防止領域A、Bへのアタッチメント9の侵入を規制する干渉防止制御を実行する一方、アタッチメント軸支位置Poが解除高さCよりも下方に位置している状態では干渉防止制御を実行しない構成にすると共に、前記解除高さCは、アタッチメント9と運転室4とが干渉する可能性のある下限のアタッチメント軸支位置PoDよりも下方で、且つ、フロント作業装置6が所定の輸送姿勢のときのアタッチメント軸支位置PoTよりも上方に位置するように設定した。
(もっと読む)
フロントローダの制御システム
【課題】自動でフロントローダを制御することができて、操作性、荷役作業性、及び脱着作業性を向上させることができるフロントローダの制御システムを提供する。
【解決手段】作業用車輌本体2に連結される揺動アーム4と、この揺動アーム4の先端に着脱自在に取付けられるアタッチメント1とを備えたフロントローダの制御システムである。アーム4の回動角度を検出するためのアーム回動角度検出手段71と、アタッチメントの回動角度を検出するアタッチメント回動角度検出手段72と、アーム回動角度検出手段71とアタッチメント回動角度検出手段72とから検出された情報に基づいて油圧作動手段6、7の動作速度を制御しつつフロントローダ1を離脱可能位置にまで自動的に移動させる制御手段とを備えた。
(もっと読む)
掘削作業機械の掘削制御装置
【課題】掘削動作のためのオペレータのレバー操作量を低減し、オペレータに大きな負担を掛けずに適正な作業を行なうことができるようにする。
【解決手段】操作レバー20a,20bのバケット,アームの上げ方向の操作量に応じた正値の速度指令信号SCa(+),SCb(+)を速度指令生成部24a,24bが出力するとき、オフセットコントローラ29は、センサ33〜36の検出出力を用いて、重負荷状態でバケット,アームが掘削対象物の掘削動作を行なっていることを検出すると、スイッチ28をオンし、オフセット値設定器37でのオフセット値OFが、スイッチ28を介し、オフセット信号生成部27a,27bでオフセット信号SOa,SObに変換されて加算部25a,25bに供給され、速度指令信号SCa(+),SCb(+)に加算される。加算部25a,25bの出力信号は、バケットやアームのシリンダの駆動信号の生成に用いられる。
(もっと読む)
作業車両
【課題】前面ドアを有するキャビンの床部を占有することなく、簡易な構成で安全性を向上させる。
【解決手段】油圧式のシリンダ6,7により作動される作業装置を設け、キャビンの前面の乗降開口部に開閉自在に設けた前面ドアに、ドアスイッチ53Dを設け、メインポンプ14とシリンダ6,7とを接続する作動油供給ライン35に、メインポンプ14とシリンダ6,7を操作するパイロット油圧式のコントロールバルブ31〜33と、これらコントロールバルブ31〜33をパイロット圧油により操作するパイロットバルブ31P〜33Pに、パイロット圧油を供給するパイロット供給ライン34を接続するとともに、このパイロット供給ライン34に荷役ロックバルブ52を設け、ドアスイッチ53Dによる前面ドア11の開放検出信号に基づいて、荷役ロックバルブ52に荷役ロック信号を出力する走行・荷役インターロックコントローラ54を設けた。
(もっと読む)
51 - 60 / 145
[ Back to top ]