
国際特許分類[E02F3/43]の内容
固定構造物 (153,614) | 水工;基礎;土砂の移送 (25,595) | 掘削;土砂の移送 (7,953) | 掘削機;土砂移送機械 (1,445) | 動力駆動によるもの (1,404) | ディッパーアームまたはバケットアームに取り付けた堀削具,例.ディッパー,バケット,を有するもの (1,029) | 構成部品 (920) | ディッパー,バケット,ディッパーアームまたはバケットアームの駆動体 (145) | ディッパーまたはバケットの位置の制御;駆動操作順序の制御 (145)
国際特許分類[E02F3/43]に分類される特許
21 - 30 / 145
掘削機

【課題】ブーム及びアームの高さ制限を行う掘削機であって、ブーム及びアームを緩やかに停止させることができる掘削機を提供する。
【解決手段】掘削機100は、ブーム高さha及び設定上限高さh0に基づいて機械本体101に対するブーム120の目標ブーム角度α0を算出し、ブーム角度αと目標ブーム角度α0との差分値Δαの減少に伴って、ブーム上昇側油室131への作動油の供給量の減少割合を大きくし、アーム高さhb及び設定上限高さh0に基づいてブーム120に対するアーム140の目標アーム角度β0を算出し、アーム角度βと目標アーム角度β0との差分値Δβの減少に伴って、アーム上昇側油室151への作動油の供給量の減少割合を大きくする。
(もっと読む)
掘削機

【課題】ブームの可動角度を制限しつつ、ブームを緩やかに停止させることができる掘削機を提供する。
【解決手段】機械本体101に対するブーム120のブーム角度αを検出し、ブーム用シリンダー130aにおけるブーム上昇側油室131への作動油の供給によりブーム120が上昇してブーム角度αが予め設定した機械本体101に対するブーム120の設定ブーム角度α0に達する場合にはブーム上昇側油室131への作動油の供給を停止させる掘削機100において、ブーム角度αと設定ブーム角度α0との差分値Δαの減少に伴って、ブーム上昇側油室131への作動油の供給量の減少割合を大きくする。
(もっと読む)
作業機を備えた建設車両
【課題】走行駆動力120に基づく作業対象物からの大きな反力122が、作業機106に加わるのを防止する。
【解決手段】ホイールローダ100は、作業機106とコントローラ160を備える。コントローラは、作業機が所定の姿勢に該当するか否か判別する。さらに、コントローラは、走行駆動力に基づく反力が所定の油圧機器に所定値Th1以上の負荷fcを与える所定の大きさの走行駆動力であるか否かを判別する。コントローラは、所定の油圧機器に加わる負荷を軽減すべく、その負荷に対抗するための作動油を所定の油圧機器に供給する。
(もっと読む)
建設機械の油圧回路及びその制御方法
【課題】油圧が急激に変動することを抑制すること。
【解決手段】コントロールバルブ103の作動位置が連通位置X2から中立位置X1に戻された場合、コントローラ204が、供給路107内の油圧の低下に応じてアンロードバルブ123から排出される圧油の流量を増加させるようにアンロードバルブ123の流量を制御する。これにより、アンロードバルブ123において油圧が急激に低下することを抑制できるので、キャビテーションによってアンロードバルブ123が摩耗、若しくは破損することを抑制できる。
(もっと読む)
機械の生産性を最大化するとともに最終勾配を保つように器具を制御するためのシステムおよび方法
開示は、一態様において、器具に動作的に接続されたコントローラを含む器具制御システムを記載している。コントローラは、第1の信号および第2の信号を、器具と動作的に通信するシステムから受信するように適合されている。第1の信号は、所望される負荷制御状態を示し、第2の信号は、所望される勾配制御状態を示す。コントローラは、さらに、第1の信号に関連付けられた第1の比較可能な特性を有する第1の目標位置を決定するとともに、第2の信号に関連付けられた第2の比較可能な特性を有する第2の目標位置を決定するように適合されている。また、コントローラは、第1の比較可能な特性および第2の比較可能な特性に部分的に基づいて、器具を第1の目標位置または第2の目標位置に移動させる制御信号を生成するように適合されている。 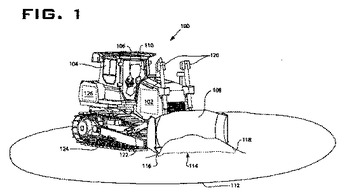 (もっと読む)
(もっと読む)
建設機械の作業方法及び建設機械
【課題】 一連の作業を確実に実行することのできる建設機械の作業方法を提供することを課題とする。
【解決手段】 建設機械を用いて行なう一連の作業を複数の動作区間に分ける。動作区間毎に、実行すべき動作に対する動作目標値を設定する。各動作区間において動作目標値を達成するまでは、次の動作へ移行できないようにし、動作目標を達成したら次の動作区間への移行を許可する。
(もっと読む)
産業用車両
【課題】産業用車両の掘削作業中に牽引力とリフト力の調整がより精細に行われるようにする。
【解決手段】車体2に揺動可能に取り付けられ、掘削対象物50を掘削し持上げるためのアーム5及びバケット6と、アーム5及びバケット6に駆動力を付与し、バケット6から掘削対象物50に作用するリフト力を発生させるアクチュエータ7,9と、車体2に作用する牽引力を発生する原動機10と、原動機10を制御する制御装置30,42とを備え、制御装置30,42は、アーム5及びバケット6の荷役姿勢を入力パラメータとして得た目標牽引力が車体2に作用するよう、原動機10を制御する。
(もっと読む)
高さ調節可能なリフト装置を備えた貨物運搬車
【課題】高さ調節可能なリフト装置を備えた貨物運搬車における転倒危険をさらに低減させることである。
【解決手段】貨物運搬車は、貨物を受け取るための高さ調節可能なリフト装置と、さらに少なくとも1つの運動方向の加速度を測定するための加速度センサ装置と、受け取られた貨物重量を決定するためのセンサと、前記リフト装置のリフト高さを決定するためのセンサと、を備えている。制御/操作装置内において、走行状態を調節する少なくとも1つの車両内装置を設定するための操作信号が発生可能である。加速度センサ装置はリフト装置上に配置されている。
(もっと読む)
油圧ショベルの作業腕制御装置
【課題】簡単な構成で、水平面、法面などの均し作業を行うことができ、かつオペレータにとって操作が容易な、油圧ショベルの作業腕制御装置を提供する。
【解決手段】制御装置26を備え、制御装置26は、作業腕12のアーム16およびアーム16を連結したブーム14のアームシリンダ20およびブームシリンダ18の同時操作によって作業具が連結されるアーム16の先端が一定の時間略直線の軌跡Kに沿って移動しているときには、アーム16の作業具連結中心17とブーム14のアーム連結中心15を結ぶ連結線Lがこの直線軌跡Kに対して直角に近づくにつれ、ブームシリンダ18の作動速度をブーム操作器24の操作に応じた速度よりも遅くする。
(もっと読む)
油圧回路、及びそれを備える車両
【課題】 操作レバー等の操作手段の操作量に応じた速度で油圧アクチュエータを駆動でき、且つエネルギーロスが少ない油圧回路を提供する。
【解決手段】 油圧回路20は、エンジン3により駆動する可変容量型の前記油圧ポンプ18から吐出される作動油をバケットシリンダ16に供給して、バケットシリンダ16を駆動するようになっている。油圧回路20は、エンジン3の回転数を検出する回転数センサ54と、バケット用操作弁31の操作量を検出する操作量検出手段41と、油圧ポンプ18の容量を変更する容量調整装置50とを有する。油圧回路20は、更にコントローラ13を備えており、コントローラ13は、検出された操作量に基づいて目標吐出流量を演算し、この目標吐出流量と検出されるエンジン3の回転数とに応じて容量調整装置50を制御するようになっている。
(もっと読む)
21 - 30 / 145
[ Back to top ]