
国際特許分類[E21B44/00]の内容
固定構造物 (153,614) | 地中もしくは岩石の削孔;採鉱 (8,211) | 地中もしくは岩石の削孔;探掘井からの石油,ガス,水,溶解性または溶融性物質または鉱物の懸濁液の採取 (2,475) | 削孔操作に特に適した自動制御システム,すなわち,運転者の介在なしに削孔操作を遂行また修正するために機能する自己操作システム,例.コンピュータにより制御される削孔システム (53)
国際特許分類[E21B44/00]の下位に属する分類
ツール送りの自動制御 (14)
作業面からツールが持ち上げられた場合の自動停止装置
国際特許分類[E21B44/00]に分類される特許
31 - 39 / 39
さく孔機の操作指示装置
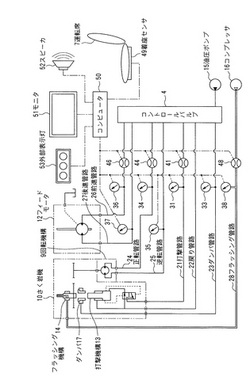
【課題】 複雑で高価な自動制御機器が不要で、必要に応じてオペレータが適切な判断とさく孔操作を行えるようにする。
【解決手段】 油圧クローラドリル1の打撃機構13、ダンパ17、回転機構9、及びフラッシング機構14の作動状況を検出する打撃圧力センサ31、ダンパ圧力センサ33、回転圧力センサ34、35、送り圧力センサ36、37、及びフラッシング圧力センサ38と、検出された作動状況の重要度を判断し、重要度に応じて段階的なオペレータへの操作案内情報をモニタ50、スピーカ52、外部表示灯53に出力するコンピュータ50とを備える。
(もっと読む)
掘削パラメータの制御装置及び方法

本発明は、削岩時の掘削パラメータを制御する方法及び装置に関する。本装置は、ドリル工具が一つ或いは複数のドリルストリング構成部材によって掘削機に接続可能であるように構成され、本装置は、削岩中ドリル工具を回転し、またドリル工具、一つ或いは複数のドリルストリング構成部材及び掘削機のグループから一つ或いは複数の間でジョイントを締め付けるための締め付けトルクを提供する手段を備えている。本装置は有効な締め付けトルクに基づいたドリル工具の回転速度を制御するように構成される。 (もっと読む)
バック・リーミング用自動制御システム
【課題】 「バック・リーミング」作業中のドローワークスの自動作業を行う制御システムを提供することにある。
【解決手段】 本発明の制御システムは、バック・リーミング作業中に或る吊上げ速度および吊上げトルクで掘管を移動させるホイストシステムを有する。オペレータ制御ユニットは、オペレータが少なくとも1つのバック・リーミングパラメータの所定値を入力することを可能にする。バック・リーミングパラメータセンサは、少なくとも1つのバック・リーミングパラメータの測定値を取得する。制御システムは、少なくとも1つのバック・リーミングパラメータをモニタする。ブレーキ組立体は、少なくとも1つのバック・リーミングパラメータの測定値と、少なくとも1つのバック・リーミングパラメータの所定値とが等しくなると、ドローワークスシステムの吊上げトルクに抵抗する。 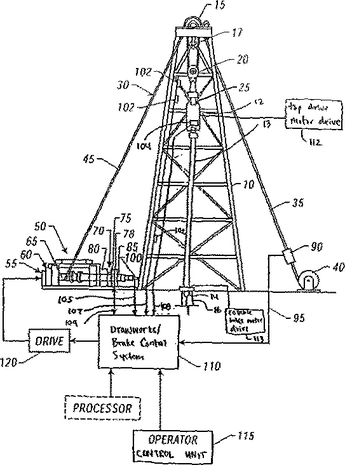 (もっと読む)
(もっと読む)
削岩制御装置
本発明は、削岩の制御方法および削岩装置に関する。送りアクチュエータ(3、33)の送りチャネル(37)の少なくとも一つには絞り弁(46)が設けられ、掘進速度が上がると、この弁によって圧力が低下し、この結果、絞り弁を通る流れが増える。圧力差および掘進速度の増加は、絞り弁の前段と絞り弁の後段で圧力を検出することで検出される。送り速度が増加すると、油圧系は打撃圧力を下げるように構成されている。  (もっと読む)
(もっと読む)
衝撃式削岩の制御方式
本発明は、衝撃式削岩の制御方法およびソフトウエア製品に関するものであり、さらに本方法が適用される削岩掘削機に関する。本発明は、回転抵抗をモニタし、その目的は、回転抵抗を所望の基準値より下に保つことにある。回転抵抗を調節するために、送り力の低減、衝撃力の低減および送りの停止などの連続的制御動作を行なうことができる。制御に対して設定された限界値を超えると、制御動作が開始する。少なくとも1つの限界値は、2つの連続する制御機能間の時間差を判定する時間限界値である。
 (もっと読む)
(もっと読む)
削岩機搭載台車における穿孔位置決め制御方法
【課題】ガイドシェル、ブームを作動させるサーボ機構を有しない、既存の削岩機搭載台車に対して、穿孔位置決め制御機能を持たせるようにする。
【解決手段】走行可能な台車14に対し、多関節ブーム11を介して、削岩機13を搭載したガイドシェル12を支持したドリルジャンボ1における穿孔位置決め制御方法であって、ガイドシェル12の少なくとも2箇所以上に発光ダイオード8A1、8B1を設けるとともに、前記ドリルジャンボ1上の少なくとも2箇所以上に撮像装置9A、9Bを夫々設け、穿孔前に、前記ドリルジャンボ1の座標及び姿勢、前記撮像装置9A、9Bの各設置座標を既知とした状態で、前記撮像装置9A、9Bの画像G1,G2に写る発光ダイオード8A1、8B1の座標を3次元画像処理によって求めることにより、前記ガイドシェル12の位置及び方向を計測し、前記削岩機13を所定の穿孔位置まで移動させる。
(もっと読む)
監視弁、削岩装置、およびそのような監視弁および削岩装置用の少なくとも2つの油圧アクチュエータの制御方法
本発明は、少なくとも2つの油圧アクチュエータを制御する方法、監視弁および削岩装置に関する。監視弁(10)は、検出チャネル(9)を介して第1のアクチュエータの入力チャネルに接続され、第2のアクチュエータの負荷検出回路(6')を制御する。負荷検出回路(6')の圧力はバネ要素(12)の力によって設定され、差圧検出により監視弁の制御要素(42)によってバイアスされる。 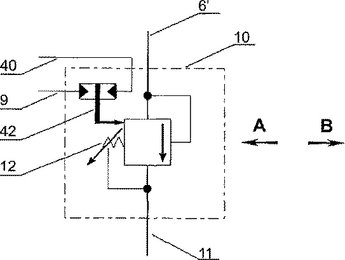 (もっと読む)
(もっと読む)
穿孔装置の穿孔位置決め方法及び建設機械の位置計測方法
【課題】中間に障害物が存在していても測量作業に支障を来すことがなく、かつ安価で穿孔装置の位置決めが行える制御方法を提供する。
【解決手段】走行可能な台車14に対し、多関節ブーム11を介して、削岩機13を搭載したガイドシェル12を支持したドリルジャンボ1における穿孔位置決め制御方法であって、ガイドシェル12の少なくとも2箇所以上に超音波発信器8A1、8B1を設けるとともに、前記ドリルジャンボ1上の少なくとも3箇所以上に超音波受信器9A〜9Cを夫々設け、穿孔前に、前記ドリルジャンボ1の座標及び姿勢、前記超音波受信器9A〜9Cの各設置座標を既知とした状態で、前記各超音波発信器8A1、8B1から発せられた超音波を前記各超音波受信9A〜9Cにより受信し、その到達所要時間から前記ガイドシェル12の位置及び方向を求め、前記削岩機13を所定の穿孔位置まで移動させるようにする。
(もっと読む)
カラーリング方法及びシステム
本発明は、穿孔機械を用いた岩盤の穿孔の初期段階の間、穿孔パラメータを制御する方法に関する。本発明によれば、穿孔機械の衝撃圧力及び送り圧力は、初期の段階の間、連続増加関数に従って制御される。本発明は、また、同様のシステムにも関する。 (もっと読む)
31 - 39 / 39
[ Back to top ]