
国際特許分類[F16H21/46]の内容
機械工学;照明;加熱;武器;爆破 (654,968) | 機械要素または単位;機械または装置の効果的機能を生じ維持するための一般的手段 (198,328) | 伝動装置 (51,171) | 主としてリンクまたはレバーのみからなり,滑動部をもつか,またはもたない伝動装置 (548) | 3次元的に運動するもの (86)
国際特許分類[F16H21/46]の下位に属する分類
回転運動伝達用 (7)
回転運動と往復運動の相互変換用 (22)
回転運動と振動の相互変換用 (6)
振動または往復運動の伝達または相互変換をするもの (12)
国際特許分類[F16H21/46]に分類される特許
31 - 39 / 39
ピボットジョイント
ピボットジョイントは、一端に配置されたボールを有する第1部材と、第1部材のボール上に位置する、1つまたは複数の支承表面を有する固定部材と、第1部材のボール上に位置する、一端に配置された1つまたは複数の支承表面を有する第2部材とを備える。第1部材と第2部材は、ボールの中心の周りで回転可能である。このタイプのピボットジョイントは、スチュアートプラットフォーム(Stewart platform)などの機械で使用するのに適する。 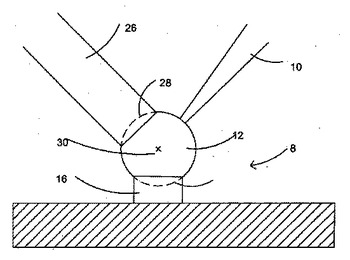 (もっと読む)
(もっと読む)
ロボットの駆動機構及びロボットハンド
【課題】本発明は、1つのアクチュエータで2つの関節を駆動する機構において、高負荷がかかる姿勢においても、対象物に対して十分な操作力を加えることが可能な多関節ロボット、特に小型化されたロボットハンドの駆動機構を提供することを目的とする。
【解決手段】本発明のロボットの駆動機構は、第一リンクと第二リンクの接合部にある第一関節と、第二リンクと第三リンクの接合部にある第二関節の2つの関節を、1つのアクチュエータとリンクアームにより連動して駆動できるようにしたロボットの駆動機構において、アクチュエータを第一リンク又は第二リンクに配置し、リンクアームは、その一端部が第一リンクに設けられた第一支軸を介して回転可能に軸支されるとともに、他端部が第三リンクに設けられた第二支軸を介して回転可能に軸支され、第一リンク、第二リンク及び第三リンクの伸展姿勢にて、前記第一支軸を、前記第一関節の軸と前記第二支軸を結ぶ線上に配置することを特徴とする。
(もっと読む)
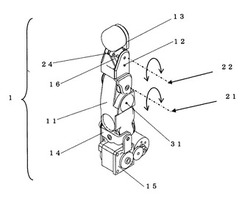
マニピュレータ、そのマニピュレータを備える多自由度マニピュレータ、6自由度マニピュレータ、二足歩行ロボット及び車両用電動シート装置、並びに、位置角度センサ

【課題】回転アクチュエータの小型化及び省電力化を図ることができる3自由度マニピュレータ等を提供することを目的とする。
【解決手段】3自由度マニピュレータ1は、内角を変更可能な6角形以上の多角枠状をなしている。そして、回転関節部のうち少なくとも3個は、回転アクチュエータからなり、残りは回転ジョイントからなる。特に、2個の回転ジョイントの間に、1個以上の回転アクチュエータが介在するようにするとよい。
(もっと読む)
リンク作動装置
【目的】 構造が簡単で、軽量コンパクトなリンク作動装置を提供する。
【構成】 静止部材1に対する可動部材4に、その軸線に対して垂直な平面内で軸中心から半径方向に三つの受け部6を円周等配位置に設け、可動部材4の各受け部6に球面部材5を半径方向に摺動可能にそれぞれ配置し、球面部材5の中心の静止部材1への投影位置が円周等配位置でそれぞれのPCR位置を保持するように、球面部材5を軸方向に摺動可能に静止部材1に設け、球面部材5と静止部材1間あるいは球面部材5と可動部材4間の少なくともいずれか一方に、可動部材4を静止部材1に対して所定の姿勢で固定する静止機構7を設ける。
(もっと読む)
パラレルメカニズム装置
【課題】 エンドエファクタの位置及び姿勢をより精度よく制御できるようにする一方で、その駆動機構をコンパクトに構成することを目的としている。
【解決手段】 加工装置は、6本のストラッド16を備え、これらストラッド16は、ベースフレーム20のノード22に2本1組で可動コア24を介して支持される。ストラッド16は自在軸継手17を介して加工ヘッド18に連結される。可動コア24は、半球型の一対の単位コアからなり、各ストラッド16は単位コア24aを貫通して設けられる。ストラッド16には、レール16aとラック16bとが固定され、単位コア24a内にはレール16aを案内するガイドと、ラック16bに噛合してモータ駆動されるピニオンとが設けられる。単位コア内において、ストラッド16の一方側にはガイドが配設され、他方側にはピニオンが配設され、ストラッド16等に被さるようにモータが配設される。
(もっと読む)
ロボットアーム
【課題】伸長状態でのアーム剛性と位置決め精度を向上することができるロボットアームを提供する。
【解決手段】第1及び第2のアーム311,321を連動させる連動部340が、一方が第2のアーム321に固定された等長の第1の連動リンク341,342と、これらに連結された等長の第2の連動リンク343,344とを有する交差リンク機構と、一方が第2の連動リンク343,344の片方に固定された等長の第3の連動リンク343,344と、一方が第1のアーム311に固定され他方が第1の連動リンク341,342のうち他方に固定された等長の第4の連動リンク347,348とを有する交差リンク機構とからなり、一方の第1の連動リンク341と一方の第4の連動リンク347とのいずれかは、第1又は第2のアーム311又は321に対し該アームの軸線から外れるよう傾けて固定されている。
(もっと読む)
4自由度高速パラレルロボット
本発明は、その一端において、工具(5)を支持する可動プラットフォーム(4)に関節式に連結され、その他端において、回転継手(2)を介してベースプレート(3)と一体構造のアクチュエータに関節式に連結される4つの連鎖(1)で構成される4自由度高速パラレルロボットに関する。可動プラットフォーム(4)は、関節式連結装置(13)によって互いに連結される4個の部材(11),(11’),(12),(12’)により構成され、これら部材の少なくとも2個は互いに平行で、可動プラットフォームの平面において1自由度を有する関節式可動プラットフォームを構成する。アクチュエータは、ベースプレート(2)においていずれの方向にも配置でき、好ましくは45°、35°、225°、315°で配置される。  (もっと読む)
(もっと読む)
運動伝達装置およびその部品
運動伝達装置であって、対称軸に関して1以上の自由度を提供する平行運動伝達構造を具え、前記平行運動伝達構造がベース部材と、可動部材と、当該ベース部材および可動部材を連結する1以上の平行運動チェーンとを具え、各平行運動チェーンが1の運動面内で動く第1アームを具え、前記運動面が対称軸から離れている装置である。 (もっと読む)
並進3自由度を提供する平行運動伝達構造を有する運動伝達装置
本発明は、並進3自由度を提供する平行運動伝達構造(3)を有する運動伝達装置に関し、上記構造は、1つのベース部材(1)と、1つの可動部材(2)と、ベース部材(1)上に配置される少なくとも1つの回転アクチュエータ(30)と、ベース部材を可動部材に連結する、それぞれが枢動制御アーム(10)を備える平行運動チェーンとを備える。少なくとも1つの回転アクチュエータ(30)の回転運動は、可動部材の並進運動が制御アームの回転運動に、又は制御アームの回転運動が可動部材の並進運動に伝達されるように、各枢動制御アーム(10)に伝達される。少なくとも1つの回転アクチュエータ(30)は、その軸(31)が制御アーム(10)の回転軸に対してほぼ垂直であるように配置される。平行運動伝達構造は、3つの平行運動チェーンを備え、各チェーンは、枢動制御アームと、一端が回転2自由度継手によって制御アームの端に、他端が可動部材にヒンジ式に取り付けられることによりデルタタイプの配置を形成する、一対の平行リンク棒とを備える。各チェーンには各回転アクチュエータが設けられ、回転アクチュエータは、その軸が互いに対してほぼ平行であるように配置される。回転アクチュエータと制御アームとの間の運動は、ケーブル部材(51)によって伝達される。  (もっと読む)
(もっと読む)
31 - 39 / 39
[ Back to top ]