
国際特許分類[F16H21/50]の内容
機械工学;照明;加熱;武器;爆破 (654,968) | 機械要素または単位;機械または装置の効果的機能を生じ維持するための一般的手段 (198,328) | 伝動装置 (51,171) | 主としてリンクまたはレバーのみからなり,滑動部をもつか,またはもたない伝動装置 (548) | 3次元的に運動するもの (86) | 回転運動と往復運動の相互変換用 (22)
国際特許分類[F16H21/50]に分類される特許
11 - 20 / 22
パラレルリンクステージの調整方法、基準位置決め治具、およびパラレルリンクステージ
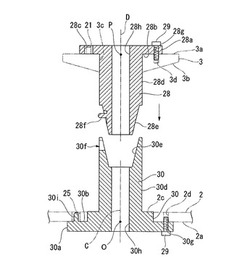
【課題】パラレルリンクステージの調整方法、基準位置決め治具、およびパラレルリンクステージにおいて、ベースに対するエンドエフェクタの基準位置出しとアクチュエータの原点補正とを、高精度かつ容易に行うことができるようにする。
【解決手段】パラレルリンクステージの調整方法であって、各パラレルリンク機構の動作を自由化するリンク自由化工程と、ベース2およびエンドエフェクタ3を相対移動させ、上基準部材28および下基準部材30を介して、ベース2およびエンドエフェクタ3を一定の位置関係に連結する位置出し工程と、各パラレルリンク機構のエンコーダから、各リンク長を取得して制御部に記憶させる調整位置取得工程と、上基準部材28および下基準部材30をパラレルリンクステージから取り外す基準位置決め治具取り外し工程と、各パラレルリンク機構の各リンク長を、制御部に記憶された各リンク長に設定する位置初期化工程とを備える。
(もっと読む)
パラレルメカニズム

【課題】何らかの理由で減速機の出力軸から潤滑剤が漏洩するような場合でも、漏洩潤滑剤がテーブルやコンベアの上面に滴下するのを確実に防止して、漏洩潤滑剤による食品や医薬品の汚損等を確実に防止できるパラレルメカニズムを提供する。
【解決手段】モーターブラケットを間に挟んで駆動モーターの減速機と締結プレートとを対向配置し、これら三者を締結固定する。潤滑剤の流下経路に臨むモーターブラケットと締結プレートの接合面に潤滑剤受を設け、減速機の出力軸から漏洩する潤滑剤を潤滑剤受で受け止めて、それ以上漏洩潤滑剤が流下するのを防止する。潤滑剤受の一部に潤滑剤溜を設け、潤滑剤溜に臨んで漏洩潤滑剤を検知するセンサーを設ける。以て、潤滑剤が漏洩したことをセンサーで速やかに検知し、この検知信号に基づきアラーム装置を作動させる。
(もっと読む)
パラレルメカニズム
【課題】使用時に樹脂ソケットが球体と同行変位するのを確実に防止して、操作ヘッドを常に適正に駆動操作できるパラレルメカニズムを提供する。
【解決手段】ベースに配置される複数個の駆動モーターと、駆動モーターで駆動操作される駆動アームおよびロッドと、ロッドで支持される1個の操作ヘッドとを備えている。ロッドの両端は、駆動アームおよび操作ヘッドに対してボール継手で連結する。ボール継手は、球体を備えたボール軸と、ボール軸に連結されるソケットロッドと、樹脂ソケットとからなる。樹脂ソケットとソケットロッドの装着座の間に、互いに係合して樹脂ソケットの移動を規制するストッパー構造を設ける。ストッパー構造は突起と、突起と係合する凹部(または穴、溝)で構成する。
(もっと読む)
パラレルメカニズム
【課題】 アームをより軽量化して、アームの慣性モーメントを減少させることが可能なパラレルメカニズムを提供する。
【解決手段】 アーム本体6は、ベース部2に取り付けられた電動モータ4にその一端が連結される第1アーム7と、一対のロッド9,9を有し、第1アーム7の他端とブラケット14とを連結する第2アーム8と、第2アーム8を構成する一対のロッド9,9を互いに引っ張る方向に付勢する連結部材11,12とを備える。各連結部材11,12は、板ばね30と、該板ばね30の両端に該板ばね30と一体的に形成された一対の取付部31,31とを有している。板ばね30は、該板ばね30の湾曲部における接平面が、一対のロッド9,9それぞれの軸線を含む平面に対して垂直となるように、一対のロッド9,9に取り付けられる。
(もっと読む)
立体カム機構
【課題】従節側の目標軌跡の選定の自由度を格段に向上させ、直交軸間の動力伝達に限ることなく、強力かつ確実な動力の伝達が可能で、可逆的な動作も可能な立体カム機構を提供する。
【解決手段】支持部材5に軸支された所定のカム回転軸1Aの周りを回転する立体カム1のカム案内面2(3)に、支持部材5の他の部分に軸支された従節側リンク4が案内される立体カム機構とする。立体カム1に3次元的なカム案内面2(3)を形成し、このカム案内面2に、従節側リンク4の一端に形成したカムフォロワ6(7)をガイドさせる。立体カム1の回転によって、カム案内面2のカムフォロワ6がガイドされる箇所のカム回転軸1Aからの半径とカム回転軸1A方向の高さが徐々に変化するように設けることで、立体カム1の回転運動を従節側リンク4の他端の揺動運動に変換させる。
(もっと読む)
シリンダー駆動による回転駆動装置
【課題】ダンパー、弁類等を開閉するためのシリンダー駆動による回転駆動装置を提供する。
【解決手段】ケーシング内部に回転軸1を有し、ケーシング外部に該回転軸1の駆動機構を設けた軸回転により開閉させるダンパー等の駆動において、回転軸1を支える軸受部4と連結したシリンダー支持板12を設け、かつ、シリンダーの駆動アーム5への作用点とシリンダー反力受け部を、シリンダー支持板12と同一平面上に構成し、かつ、シリンダー支持点も該シリンダー支持板面と同一平面上になるようにしたことを特徴とするシリンダー駆動による回転駆動装置。
(もっと読む)
パラレルリンク型作業装置
【課題】パラレルリンク型作業装置において、可動部に動力を伝達する動力伝達部のリンク等がベースの領域からはみ出ないようにする。
【解決手段】ベース4に扁平な回転型アクチュエータ6を3つ設ける。アクチュエータ6は、その回転出力軸がベース4に対して平行で、ベース4の中央に向き、かつベース4の中央から放射状に並ぶように配置、固定されている。各回転型アクチュエータ6の回転出力軸と可動部5とを平行リンク機構21で構成される動力伝達部で連結する。3つの回転型アクチュエータ6を駆動して可動部5の位置を制御する。ベース4に設けられたエンドエフェクタ姿勢制御用のアクチュエータ7で回転動力伝達手段15を介して可動部5に設けたエンドエフェクタ20を回転させる。平行リンク機構21はベース4の内側領域で移動することから、リンク等がベースの領域からはみ出ることはなく、安全が確保できる。
(もっと読む)
立体カム機構
【課題】 カム案内面形状の自在な選定を可能として、従節側の目標軌跡の選定の自由度を格段に向上させ、直交軸間の動力伝達に限ることなく、強力かつ確実な動力の伝達が可能で、可逆的な動作も可能な立体カム機構を提供することを目的とする。
【解決手段】 立体カム1に3次元的なカム案内面2(3)を形成するとともに、このカム案内面2に前記従節側リンク4の一端に所定の角度にて形成したカムフォロワ6(7)をガイドさせるようにして、立体カム1の回転運動を従節側リンク4の他端の揺動運動に変換するように構成したことにより、カム案内面形状の自在な選定を可能として、従節側の目標軌跡の選定の自由度を格段に向上させ、支持部材の形状の選定と相まって、直交軸間の動力伝達に限定されることなく、また、バックラッシを伴うことなしに、カム案内面形状の自在な設計により立体カムの円滑な動作が得られる。
(もっと読む)
非線形弾性機構及びロボット用関節機構
【課題】可及的に小さなハードウェアサイズで、ロボットの手首関節等の動きと剛性の可変制御を可能とするハードウェアを提供する。
【解決手段】非線形弾性機構において、モータ15と、モータ15によって動力が伝達される入力部14と、入力部14の動きに対応する出力部12と、入力部14と出力部12との間に設けられ弾性特性を有する弾性部材11と、を備える機構であって、モータ15によって入力部14が第一の動きをするとき、弾性部材11の弾性特性が該入力部14の動きに応じて変化する第一駆動モードと、モータ15によって入力部14が第一の動きとは異なる第二の動きをするとき、該入力部14の動きに連動して出力部12が変位する第二駆動モードと、を有する。
(もっと読む)
ボールねじ装置
【課題】 ナットの直線運動を一旦揺動アームの揺動運動に変換し、再び回転運動に変換して被駆動体を駆動する、寿命の長いボールねじ装置を提供する。
【解決手段】 ボールねじ軸12の軸心に対して揺動アーム21の中心軸が垂直位置にあるとき、揺動アームの先端部21aとナットの凹部13cとの接触点はPにある。ナット13が右或いは左に移動すると揺動アームの先端部21aはナットの凹部13cの円弧状凹部13pの中で傾斜するが、揺動アームの傾斜は摺動連結部21Cにおいて第1の部材21Aと第2の部材21Bとの距離が調整され、前記接触点Pは移動しない。揺動アーム21の揺動中心は常にボールねじ軸12の軸心を含み、且つ被駆動軸30と平行な平面上にあり、ナット13に発生する作用力はナットボール循環路の中心を通るためナット13に反力モーメントを発生させることがない。
(もっと読む)
11 - 20 / 22
[ Back to top ]