
国際特許分類[G01B11/245]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 長さ,厚さまたは同種の直線寸法の測定;角度の測定;面積の測定;表面または輪郭の不規則性の測定 (22,327) | 光学的手段の使用によって特徴づけられた測定装置 (13,565) | 輪郭または曲率の測定用 (3,716) | 複数の,固定された,同時に作動する変換器を用いるもの (241)
国際特許分類[G01B11/245]に分類される特許
101 - 110 / 241
3次元モデルの作成方法および物体認識装置
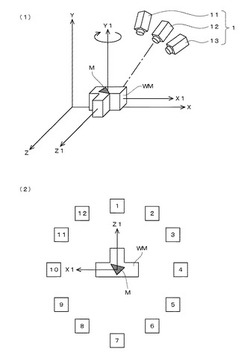
【課題】実物モデルとカメラとの位置関係を任意に変更して3次元計測を行い、各計測により復元された3次元情報を位置合わせして統合する方法でも、精度の良い3次元モデルを作成できるようにする。
【解決手段】3次元認識の対象とするワークの実物モデルWMの所定箇所に、向きを一意に特定できる形状の多角形のマークMを取り付ける。そして、このマークMが各カメラ11,12,13の視野に含まれる状態が維持されるように実物モデルWMの姿勢を変更して3次元計測を行う処理を、複数回実行する。さらに、毎回の計測により復元された3次元情報のうちの2以上の所定数を選択し、これらを位置合わせして統合した後、統合された3次元情報からマークMに対応する情報を削除または無効化し、その処理後の3次元情報を3次元モデルに設定する。
(もっと読む)
能動的立体視によるタイヤ表面の凹凸評価
本発明は、タイヤPの表面のディジタル凹凸像を収集する装置であって、立体視像の収集のための2つのカラーカメラ(13a,13b)を有し、各カメラは、所与の原色(R,G,B)のためのN個の1次イメージセンサ(131a,132a,133a,131b,132b,133b)を有し、Nは、2以上であり、カメラは、照明手段(231,232,233)の使用によりタイヤ表面の所定の領域(Z)に向かって放出され(E)、タイヤ表面により反射された(F)光を収集するよう配置され、収集装置は、各々独立して且つ同一方向に沿ってカメラの原色(R,G,B)のうちの1つに対応した波長を持つ光を所与の幅(L1,L2・・・LN)の交互に並んだ照明バンド及び非照明バンドから成るフリンジ系(S1,S2・・・SN)に従って、タイヤ表面の領域(Z)上に同時に投射するN個の照明手段(231,232,233)を有することを特徴とする収集装置に関する。 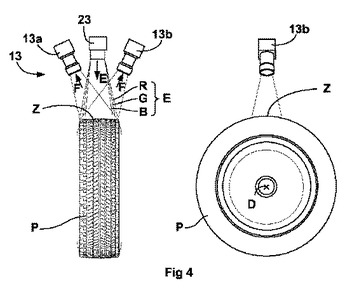 (もっと読む)
(もっと読む)
3次元形状計測用撮影装置および方法並びにプログラム

【課題】被写体にパターン光を照射することにより取得した画像を用いて、被写体の3次元形状を正確に計測する。
【解決手段】第1のカメラ2により被写体のプレ画像を取得し、演算部5がプレ画像上に複数の領域からなる照射範囲を設定する。さらに、照射範囲内の領域毎にパターン光照射の有無を判定する。次いで、第1および第2のカメラ2,3によりパターン光を照射しない撮影およびパターン光を照射する撮影を行い、非照射基準画像G1および照射基準画像G1′、並びに非照射参照画像G2および照射参照画像G2′を取得する。これらの画像の画像データから画像ファイルを生成し、画像ファイルのヘッダに照射範囲内の各領域におけるパターン光照射の有無の情報を記述する。
(もっと読む)
3次元形状計測用撮影装置および方法並びにプログラム
【課題】被写体にパターン光を照射することにより取得した画像を用いて、被写体の3次元形状を正確に計測する。
【解決手段】第1のカメラ2により被写体のプレ画像を取得し、演算部5がプレ画像上に複数の領域からなる照射範囲を設定する。さらに、照射範囲の領域毎にパターン光照射の有無を判定し、判定結果に応じてプロジェクタ4の変換部12にパターンを表示する。これにより、光源11をオンとすると、被写体の必要な部分にのみパターン光が照射される。被写体におけるパターン光の反射光は、第1および第2のカメラ2,3に入射する。そして、第1および第2のカメラ2,3が基準画像および参照画像を取得し、演算部5が画素の対応付けを行うことにより、被写体の3次元形状を計測する。
(もっと読む)
画像生成装置、及びプログラム
【課題】被写体が3次元表示に適さないものであっても、視認性の高い3次元画像を取得すること。
【解決手段】被写体の特徴点情報とその距離情報とを対応付けた点群情報に含まれる距離情報のうち、特定の距離情報よりも大きい距離範囲に属する距離情報が小さくなるように補正する。そして、このようにして補正された点群情報を用いて3次元画像を生成する。このようにすれば、主要被写体と背景被写体との距離が大きい場合であっても、点群情報における主要被写体と背景被写体との距離情報が小さくなる。これにより、補正された点群情報を用いて生成される3次元画像においては、3次元画像を構成する三角形ポリゴンがいびつな形状となることを回避できる。その結果、視認性の高い3次元画像を得ることができる。
(もっと読む)
3次元形状計測装置および方法並びにプログラム
【課題】被写体にパターン光を照射することにより取得した画像を用いて、被写体の3次元形状を正確に計測する。
【解決手段】プロジェクタ4から所定方向に偏光されたパターン光を出射して被写体に照射する。被写体におけるパターン光の反射光は、フィルタ部14,15により所定方向に直交する方向に偏光されて、第1および第2のカメラ2,3に入射する。これにより、第1および第2のカメラ2,3が基準画像および参照画像を取得し、演算部5が画素の対応付けを行うことにより、被写体の3次元形状を計測する。
(もっと読む)
3次元計測装置およびその方法
【課題】カメラの位置や特性の違いによる影響を受けずに、かつ、精度良く鏡面物体の3次元形状を測定する。
【解決手段】鏡面物体である計測対象物の3次元形状を計測する3次元計測装置であって、複数のカメラと、撮影された画像のそれぞれから計測対象物の表面の物理特徴である法線の向きを取得する特徴取得手段と、この物理特徴を用いて画像間で対応する画素を探索する対応画素探索手段と、対応する画素間の視差に基づいて3次元測量を行う測量手段と、を備える。なお、各画像における法線の向きを共通の座標系に変換する座標変換手段を有することが好適である。この座標変換のパラメータはカメラキャリブレーションの際に得られるパラメータから算出することができる。
(もっと読む)
3次元位置計測装置
【課題】対応点の探索に要する計算量を大幅に減らし、短時間でかつ高精度に、かつトラブルの発生も含めて、対応点の3次元位置を計測することを可能とする。
【解決手段】対象物を異なる視点から見た複数の画像を取り込む。その画像の1つを基準画像、それ以外を参照画像とする。基準画像および参照画像から、カメラパラメータおよび基準点から計算されるエピポーラ線に沿って、所定幅Wの1次元の画素データ列を切り出す。この切り出した1次元の画素データ列から位相限定相関関数を計算することによって相関ピークの位置Ph(x,y)を求め、この相関ピークの位置Ph(x,y)から位置ずれ量dを求め、この位置ずれ量dから基準点pに対応する対応点qを探索する。この対応点の探索過程において、相関ピークの値Phが予め定められている下限値Phthに満たない場合、異常である旨を通知すると同時に、以降の3次元位置の計測を中止する。
(もっと読む)
作業機械のステレオ画像処理装置
【課題】明るさが大きく変動する環境下における3次元形状計測に際しての各カメラによる撮影画像を、撮影部位の明るさが互いに同等となる撮影画像として取得できる。
【解決手段】アーム3に設けられ、明るさ調整用のマーカ6と、第1カメラ51、第2カメラ52のそれぞれの撮影画像よりマーカ6付近の撮影部位を検出するマウス9を含む撮影部位検出部と、この撮影部位検出部で検出された第1カメラ51、第2カメラ52による撮影部位の平均明るさA1,A2をそれぞれ求めるとともに、撮影部位それぞれの平均明るさA1,A2の差を演算する明るさ比較処理部72と、この明るさ比較処理部72によって求められた第1カメラ51、第2カメラ52による撮影部位それぞれの平均明るさA1,A2の差が少なくなるように、第1カメラ51、第2カメラ52のシャッター速度を調整する調整部とを備えた。
(もっと読む)
立体画像撮影表示システム
【課題】径方向に大きく突出させることなく、立体観察画像における観察者に与える違和感を解消可能な立体画像撮影表示システムを提供する。
【解決手段】視差の異なる光学系1L,1Rを有する撮像手段1と、画像処理手段2と、処理された画像を表示する表示手段3とを有し、画像処理手段2が、左右の画像を用いて立体計測を行う機能を有する計測手段2aと、計測手段2aを介して得られた結果に基づいて、左右の画像を融像して立体画像表示する場合の観察し難い領域の有無を検出する検出手段2bと、所定の画像加工を行う画像加工手段2cとを有し、さらに、検出手段2bを介して観察し難い領域が検出された場合に、視差の異なる光学系同士の光軸間の距離を固定した状態でその領域を観察し易い状態にして、表示手段3に画像表示されるように、撮像手段1又は画像処理手段2を制御する観察画像自動調整手段4を備える。
(もっと読む)
101 - 110 / 241
[ Back to top ]