
国際特許分類[G01C17/28]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 距離,水準または方位の測定;測量;航行;ジャイロ計器;写真計量または映像計量 (22,094) | コンパス;航行もしくは測量のために真北または磁北を探知する装置 (352) | 磁気コンパス (194) | 電気磁気コンパス (156)
国際特許分類[G01C17/28]の下位に属する分類
国際特許分類[G01C17/28]に分類される特許
21 - 30 / 56
方位センサ
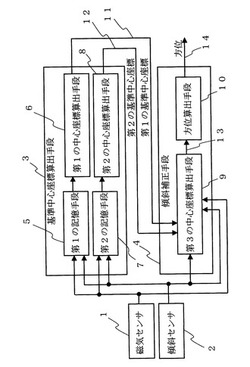
【課題】2軸の磁気センサは傾斜した場合、精度良く傾斜補正することができず、その結果、精度良い方位を算出できないという課題があった。
【解決手段】地磁気を検出する検出する磁気センサ1と、傾斜角を検出する傾斜センサ2と、基準となる傾斜における磁気センサの2次元出力軌跡の中心座標を算出する基準中心座標算出手段3と、現在の磁気センサの出力と、現在の傾斜センサの出力と、基準中心座標算出手段の出力である中心座標とを用いて傾斜補正を行った上で、方位を算出する傾斜補正手段4とを有する構成とした。
(もっと読む)
磁気データ処理方法、装置及びプログラム

【課題】高精度にオフセットを導出するための磁気データ群を短時間に蓄積できる磁気データ処理方法、装置及びプログラムを提供する。
【解決手段】磁気センサから磁気データを順次入力し、入力された2個の前記磁気データ間の距離が第一しきい値を越えることを必要条件として、前記磁気データの蓄積手段への格納を入力された2個の前記磁気データから開始し、前記蓄積手段に格納されている前記磁気データとの距離が前記第一しきい値より小さい第二しきい値を越える前記磁気データが入力されたことを必要条件として、入力された前記磁気データを前記蓄積手段に追加格納し、前記蓄積手段に格納されている前記磁気データに基づいて前記磁気データのオフセットを導出する、ことを含む磁気データ処理方法。
(もっと読む)
方位角度検出方法
【課題】比較的簡単な構成で磁気方位センサによる方位検出誤差を補正する新規な手段を提供する。
【解決手段】GPSコンパス演算ユニット6と磁気方位センサ9で検出された方位情報はデータ処理部101内の方位角度データ比較部111に入力され、磁気方位センサ9から入力された方位情報91とGPSコンパス演算ユニット6から入力された方位情報61との差が計算され、その差Yと、方位情報91の値Xが対として誤差記憶部114に格納される。近似関数係数演算部112は、誤差記憶部114に格納されているYのデータ列を、Xを入力としたときの出力として近似関数を仮定し、その係数を最小二乗法による線形回帰分析により計算する。補正量計算部113はGPSコンパス演算ユニット6から方位情報61が得られない状態において、近似関数に磁気方位センサ9から取得した方位情報91を代入し、計算されたYを方位情報91に補正値として加える。
(もっと読む)
オフセット補正プログラム及び電子コンパス
【課題】漏洩磁場が存在する環境下であっても磁気センサに加わるオフセットを補正して正確に磁気検出を行うことができる電子コンパスを提供すること。
【解決手段】種々の原因でセンサ部12に外部磁場が加わると、特性曲線は抵抗(電圧)と磁界の座標の交点を通らずにずれる。すなわち、オフセット電圧分(Roff)が生じる。本発明においては、このオフセット電圧分をキャンセルするための補正値を求めるために、バイアス磁界を反転させた2つのステージから出力電圧の差分を求め、その差分が略0になるまでバイアス磁界を制御する。そして、出力電圧の差分が略0になったときの対応バイアス磁界(電流値)を補正値(補正バイアス)とする。これにより、オフセット電圧が加わったとしても補正をすることができるので、正確に磁気検出を行うことができる。
(もっと読む)
電子方位計
【課題】互いに直交する3方向の各軸にそれぞれ配置される磁気センサの感度が異なっている場合でも、各軸の磁気センサの感度差を補正し、正確にオフセットを算出することで、正確な方位を算出することのできる電子方位計を提供すること。
【解決手段】本発明の電子方位計は、互いに直行する3軸上にそれぞれ磁気センサが配置された磁気センサ出力取得装置で取得した3次元座標値を用いて、直交する3軸のいずれか1軸に配置された磁気センサの感度を基準として、他の2軸に配置された磁気センサの相対感度を算出し、相対感度を用いて方位を演算する方位演算装置とを備えることを特徴とする。
(もっと読む)
方位または磁力線方向情報取得方法及び装置
【課題】衛星や電波源に頼らずとも廉価かつ簡便に、かつ、陸上においても高い信頼性を持って方位情報を取得し得るようにする。
【解決手段】投擲すると回転する回転投擲体11に導体12を設ける。導体12内に所定方向の誘導起電力が生じた時に検出出力を発する検出部13を設け、この検出出力が発せられたことを報知部14にて報知する。
(もっと読む)
磁気検出装置及びそれを用いた電子方位計
【課題】漏洩磁場が存在する環境下であっても正確に外部磁界を検出することができる磁気検出装置及びそれを用いた電子方位計を提供すること。
【解決手段】センサ部12に正負のバイアス磁界を印加して第1及び第2出力電圧を求め、第1出力電圧と第2出力電圧との間の第1差分を算出する。次いで、センサ部12に正負のバイアス磁界にそれぞれ付加バイアス磁界を付加した補正バイアス磁界を印加して第1及び第2出力電圧を求め、第1出力電圧と第2出力電圧との間の第2差分を算出する。次いで、第1差分と第2差分とを比較し、第1差分が第2差分よりも大きい場合には、付加バイアス磁界の大きさを増加させてを最小にする、すなわち、差分を略0にする。
(もっと読む)
携帯電子機器
【課題】地磁気センサを搭載し、キャリブレーションを行わなくてもよい、或いはキャリブレーションを行う回数が少なくてすむ携帯電子機器を提供する。
【解決手段】上部筐体10内の永久磁石5に対向するように配設された下部筐体20内の磁性体3が、携帯端末100が閉じられるたびに永久磁石5によって決まった状態に着磁され、携帯端末100に何らかの磁力源が接近しない限り携帯端末100内の磁場の状態は磁性体3が発する磁気によって一定になる。
(もっと読む)
移動体の移動方向検出方法及びシステム
【課題】地磁気のずれによる方向の誤差を補正して正確に移動方向を推定できる移動体の移動方向検出方法及びシステムを提供する。
【解決手段】予め定められた位置に設けられた発信装置701から信号により、移動体の位置を特定するものに用いられ、移動体の有する方向検出手段801からの進行方向の検出信号値を補正し、移動体の進行方向を検出する際に、発信装置701から信号により移動体の現在位置における地磁気のずれ値を入手し、方向検出手段801からの移動体の進行方向の検出信号値は、その位置の入手した地磁気のずれ値を用いて方向の誤差を補正して方向を検出する。
(もっと読む)
磁気方位検出装置及びその方位演算方法
【課題】2軸磁気センサが地面に対して傾斜しても、誤差の少ない方位角を得る。
【解決手段】回路基板2にX軸方向の地磁気成分を検出するX軸磁気センサ3と、X軸方向に対して90度の角度を有するY軸方向の地磁気成分を検出するY軸磁気センサ4と、傾斜センサ7とを固着し、X軸磁気センサ3とY軸磁気センサ4からの情報に基づいてX軸方向の地磁気成分であるX軸信号P4とY軸方向の地磁気成分であるY軸信号P5を取得する地磁気取得部6と、傾斜センサ7からの情報に基づいて回路基板2の傾斜角を取得する傾斜角取得部8と、取得した傾斜角に基づいてX軸データP8とY軸データP9を補正する傾斜角補正部10と、傾斜角補正部10によって補正された補正X軸データX3と補正Y軸データY3に基づいて方位角θ0を算出する方位角演算部11と、算出された方位角θ0を0〜360度方位角に修正する方位角修正部12とを備える構成とした。
(もっと読む)
21 - 30 / 56
[ Back to top ]