
国際特許分類[G01C3/00]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 距離,水準または方位の測定;測量;航行;ジャイロ計器;写真計量または映像計量 (22,094) | 視準線上の距離測定;光学的距離計 (1,749)
国際特許分類[G01C3/00]の下位に属する分類
細部 (1,609)
可変角度と観測地点内,例.機器内,における固定長の基線とからなる視差三角形を使用するもの (4)
可変角と,目標またはその付近あるいは目標自身により形成された固定長の基線とからなる視差三角形を使用するもの
固定角と,観測地点内,例.機器内,における可変長の基線とからなる視差三角形を使用するもの
固定角と,目標またはその付近,または目標自身により形成される可変長基線からなる視差三角形を使用するもの (2)
目標物を焦点合せすることによるもの,例.すりガラススクリーン上に
国際特許分類[G01C3/00]に分類される特許
71 - 80 / 134
カメラ、カメラアレイ及びカメラアレイシステム
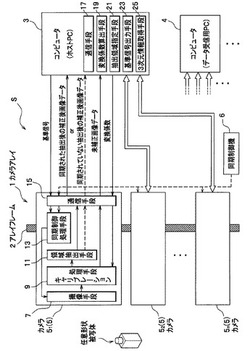
【課題】ホストPC(コンピュータ)の処理負荷を軽減すると共に、伝送されるカメラ映像の伝送量を低減することができ、また、被写体の正確な3次元情報を取得することができるカメラ、カメラアレイ及びカメラアレイシステムを提供する。
【解決手段】カメラ5は、被写体の3次元情報を取得するカメラアレイシステムSで用いられ、撮像した当該被写体の画像データに含まれる幾何歪みの補正をするための補正指令をコンピュータ3から通信手段15を介して受信し、当該補正指令に基づいて補正をした後の補正後画像データを、前記通信手段15を介して伝送するものであって、撮像手段7と、キャリブレーション処理手段9と、領域抽出手段11と、を備える。
(もっと読む)
距離測定装置及びその方法、距離測定装置を用いた厚さ測定装置

【課題】本発明は、被測定物の表面の粗さや反射率などの光学的な反射特性の変化を受けにくく、且つ、小型化が容易な高精度な厚さ測定が可能な距離測定装置を用いた厚さ測定装置を提供することを目的とする。
【解決手段】一対の距離測定装置と、距離測定装置の出力から厚さを演算する厚さ演算部7とを備え、距離測定装置は、被測定物の表面にレーザビームを投光する光源部2と、該被測定物に投光された前記レーザビームを撮像するカメラ3と、光源部と前記カメラとを所定の位置に設定する支持部材4と、撮像された前記レーザビームの画像の位置の変化から被測定物との間の距離を求める距離演算部5とを備え、距離演算部は、レーザビームの画像から被測定物が移動する軸方向のプロファイルを求め、該プロファイルの重心位置を求めて、カメラと被測定物との間の距離を求めるようにしたことを特徴とする。
(もっと読む)
距離検出装置
【課題】 従来に比べて少ない演算量で、車両に搭載された2つの撮像装置の光軸間平行度ずれに起因する誤差を補正して正確な視差を算出し、距離検出精度を向上させることできる距離検出装置を提供する。
【解決手段】 時刻t0及びt1において、静止対象物の視差δd(t0)δd(t1)の検出を行うとともに、時刻t0からt1までの車両の走行距離Lを算出する。検出視差δd(t0)、δd(t1)及び走行距離Lに基づいて、カメラ1R、1Lの光軸間平行度ずれに起因する誤差を視差オフセット量D(φ)として求め、視差オフセット量D(φ)により検出視差δdを補正する。時刻t0からt1までの時間Tmは車速VCARが高いほど短くなるように設定される。
(もっと読む)
撮像系校正装置と記録媒体
【課題】撮像装置に入射する光線軌跡を検出して撮像装置の位置と方位を校正する手段を提供すること。
【解決手段】撮像系校正装置は,2ヶ所以上でのパターン板のパターンを撮像装置により観測して画像入力する画像入力手段と,該パターン板に固定構造化パターンもしくは時系列変化するパターンを表示する為のパターン発生手段と,該画像入力して得た観測画像の少なくとも2点以上の画素に対応する該各パターン板上の対応位置を同定する対応付け手段を有し,かつ,該各画素に対応する該各パターン板の位置を使って該各画素への光路軌跡を算出する光線算出手段と,該光路軌跡を使って該撮像装置の外部パラメータもしくは内部パラメータもしくは両パラメータを校正するパラメータ算出手段を備えたことを特徴とする。
(もっと読む)
ステレオ画像調整方法、ステレオ画像調整システム、及びステレオ画像調整プログラム
【課題】ステレオ画像を構成する画像間の誤差を倍増させることなく、ステレオ画像の正確性及び安定性を向上させることができるようにする。
【解決手段】カメラ10の主カメラは、ステレオ画像を構成する主画像を撮影する。また、カメラ10の参照カメラは、ステレオ画像を構成する参照画像を撮影する。また、差分画像生成部216は、主画像と参照画像との座標値の差を検出して差分画像を生成する。また、誤差算出部217は、差分画像に基づいて、主画像及び参照画像の座標値の補正値を算出する。そして、部分切出部205は、カメラ中心検出部202が算出したズレ値に基づいて、主画像から部分画像を抽出する。また、部分切出部215は、誤差算出部217が算出した補正値に基づいて、参照画像から部分画像を抽出する。
(もっと読む)
三次元座標系の設定方法および装置
【課題】測定値を表す座標系として複数の座標系を設定することができる装置に対し、複数の座標系を効率よく且つ精度よく設定する。
【解決手段】所定の空間に、ターゲットマーク93(第1マーク)を備えた較正チャート92と、外観上識別可能な基点マーク43(第2マーク)を備えたステレオカメラ1を配置する。ステレオカメラ1に接続された設定装置91からステレオカメラ1に較正値を入力し、自動較正機能により固有座標系の原点を較正する。設定装置91は、較正値、ターゲットマーク93の位置座標および基点マーク43の位置座標に基づいて、固有座標系における基点マーク43の位置座標を算出する。設定装置91は、算出した基点マーク43の位置座標を、固有座標系とは別の共通座標系の原点の位置座標として、ステレオカメラ1に記憶せしめる。
(もっと読む)
立体撮像装置および立体撮像装置の制御方法並びにプログラム
【課題】隠れ点を考慮して簡易に精度良くマッピング画像を取得できるようにする。
【解決手段】同期制御部20により距離画像を取得するための撮像部2Aおよび撮像部2Bの駆動を同期させて距離画像および2次元画像を取得する。対応関係算出部30により、距離画像上における画素と、2次元画像上における画素との対応関係を算出する。この際、隠れ点検出部31において、撮像部2Aからは臨むことができるが撮像部2Bからは臨むことができない被写体上の隠れ点を距離画像および2次元画像上において検出する。マッピング部32により、対応関係に基づいて、隠れ点を視認可能に2次元画像を距離画像にマッピングしてマッピング画像を生成する。
(もっと読む)
車載用ステレオカメラの校正方法、車載用距離画像生成装置及びプログラム
【課題】校正できる場所が限定されずかつ校正精度の高い車載用ステレオカメラの校正方法、車載用距離検出装置及びプログラムを提供する。
【解決手段】この車載用ステレオカメラの校正方法は、距離画像生成のためにステレオ画像を取得する車載用ステレオカメラを校正するものであり、自動車が停車中であるか走行中であるかを判定する判定ステップと、自動車の停止中にステレオカメラの校正を実行する校正ステップと、を含む。
(もっと読む)
位置検出装置及び位置検出方法
【課題】1つのモデルで距離による歪曲収差の変化に容易に対応可能であり、近距離から遠距離まで、様々な距離にある対象物の位置を高精度に検出することのできる位置検出装置及び位置検出方法を提供する。
【解決手段】光学系22を備え対象物Pを撮像する複数の撮像手段2a,2bにより得られた対象物Pの結像面25上の結像位置に関する実測値又は光学系22に対する対象物Pの位置に関する位置関連情報に基づいて光学系22に入射する光束と光学系22の光軸との交点が光軸の延在方向に前後する交点変位モデルを適用して、撮像手段2a,2bによって撮像された対象物Pの位置を検出する画像処理部3を備えている。
(もっと読む)
距離検出装置の光学ずれ検出方法及び距離検出装置
【課題】距離検出装置において走行距離センサ等の別の距離測定手段を必要とせずに車両が停止中でも簡易にずれ検出が可能なずれ検出方法及び距離検出装置を提供する。
【解決手段】この距離検出装置のずれ検出方法は、光学系と撮像素子とから構成される複数のカメラで得たステレオ画像に基づいて距離を検出する距離検出装置におけるずれを検出するとき、光学系を介して撮像素子に撮像された既知物体像から既知物体までの第1距離値を求め、第1距離値と、ステレオ画像から検出した既知物体までの第2距離値と、を比較することで距離検出装置におけるずれを検出する。
(もっと読む)
71 - 80 / 134
[ Back to top ]