
国際特許分類[G01C3/00]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 距離,水準または方位の測定;測量;航行;ジャイロ計器;写真計量または映像計量 (22,094) | 視準線上の距離測定;光学的距離計 (1,749)
国際特許分類[G01C3/00]の下位に属する分類
細部 (1,609)
可変角度と観測地点内,例.機器内,における固定長の基線とからなる視差三角形を使用するもの (4)
可変角と,目標またはその付近あるいは目標自身により形成された固定長の基線とからなる視差三角形を使用するもの
固定角と,観測地点内,例.機器内,における可変長の基線とからなる視差三角形を使用するもの
固定角と,目標またはその付近,または目標自身により形成される可変長基線からなる視差三角形を使用するもの (2)
目標物を焦点合せすることによるもの,例.すりガラススクリーン上に
国際特許分類[G01C3/00]に分類される特許
101 - 110 / 134
ステレオカメラの光軸調整方法
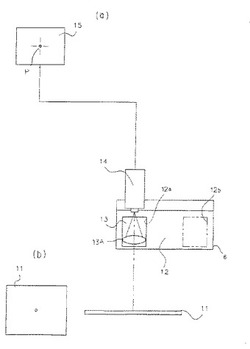
【課題】レンズの光軸位置と撮像素子の中心位置とを容易に合わせることができるステレオカメラの光軸調整方法を提供する。
【解決手段】基準となるレンズ13Aを有する基準鏡筒13をステレオカメラボディ12に形成された基準となる2つの穴12a,12bの一方に挿入させる。次に、基準となるレンズ13Aの光軸上に配置されたスポット光源11からスポット光を出射させ、スポット光源11の軌跡を一点に固定する。その後、鏡筒13に代えてレンズを有する第1鏡筒を穴12aに挿入させ、レンズの光軸がレンズ13Aの光軸の位置と一致するように第1鏡筒の位置を調整する。次に、穴12bに挿入された第2鏡筒のレンズの光軸がレンズ13Aの光軸の位置と一致するように第2鏡筒の位置を調整する。
(もっと読む)
ステレオカメラの調整装置

【課題】カメラの位置ズレの検出処理に要する時間を短縮可能なステレオカメラの調整装置を提供する。
【解決手段】算出部21bは、カメラ12によって調整用画像50を撮像して得られた画像をリファレンス画像とし、カメラ13によって調整用画像50を撮像して得られた対象画像をリファレンス画像に対して移動させながら、対照画像の位置毎に、2つの重なり合う調整用パターン51a,52aの外形の面積を算出する。位置検出部21bは、各位置の面積値を比較することによって、面積値が最も小さくなる最小位置を検出する。制御部21は、駆動装置23を制御して、前記最小位置に、カメラ13を最小位置に移動させて位置ズレの調整を行う。
(もっと読む)
車輌運転手のための視程の長さ決定方法
【課題】霧、他の車輌、他の自動車等、運転手の視程を妨害する要因の存在下で、車輌の運転手のために、視程の長さを決定する。
【解決手段】運転手の視程を妨害する要因の存在下で、車輌の運転手のために視程の距離を決定するための方法に関し、運転手の視野内で撮像された画像領域の画素の光度を決定して、視感度曲線(LUX)を得る工程と、光度(LUX)の曲線への第1の接線(AA’)を決定する工程と、光度(LUX)の曲線への第2の接線(CC’)を決定する工程と、第1の接線(AA’)及び第2の接線(CC’)により、視程の距離を代表するスイープライン(FBL)を決定する工程とを有している。
(もっと読む)
距離情報出力装置及び3次元形状復元装置
【課題】被写体を撮影したカメラ画像だけから被写体の正確な3次元形状を復元する。
【解決手段】本発明による3次元形状復元装置は、カメラ画像から被写体のシルエット画像を生成するシルエット画像生成手段(12)と、生成された複数のシルエット画像から、撮影カメラのキャリブレーションデータを用いて、視体積交差法により被写体と外接する概形形状モデルを生成する手段(13)と、撮影カメラから概形形状モデル表面までの距離を各画素毎に演算して概形距離情報を生成する手段(14)と、生成された概形距離情報から、被写体の局所的な形状情報を生成する手段(15)と、カメラ画像から選択した基準カメラ画像と参照カメラ画像を用い、基準カメラ画像を撮影したカメラから被写体までの距離を補正する対応点探索手段(16)と、対応点探索手段から出力される距離情報を用いて被写体の3次元形状を復元する3次元形状復元手段(17)を有する。
(もっと読む)
カメラ位置検出方法
【課題】 複数のカメラの位置を人手を介することなく自動で検出することができるカメラ位置検出方法を提供する。
【解決手段】 パノラマカメラにより複数のカメラを撮影する第1ステップと、駆動機構を制御して複数のカメラを動作させる第2ステップと、パノラマカメラにより複数のカメラを動作させた後の複数のカメラを撮影する第3ステップと、複数のカメラの動作の前後のカメラを撮像した差分画像のデータにより撮影画像中の複数のカメラを特定するデータ処理を行う第4ステップと、特定された複数のカメラが撮像されている画像により前記複数のカメラの位置を算出するデータ処理を行う第5ステップとの処理を行う。
(もっと読む)
カメラモジュール
【課題】2つの独立したカメラの光軸を平行に配列したカメラモジュールにより、三角測量法を用いて被写体距離を算出する場合、複雑な補正を必要とし、時間的な安定性や周辺温度に対する安定性に欠けるという問題があった。
【解決手段】レンズアレイ(11)として一体化された複数のレンズ(12a、12b)と、これらのレンズにより撮像された被写体像を検出する複数の撮像領域(17a、17b)が単一の半導体ウエハー上に形成された固体撮像素子(16)とを有する複眼式カメラモジュールとすることで、簡単な初期補正のみで経時変化や周辺温度変化に対して安定で高精度な被写体距離の測定が可能である。
(もっと読む)
距離センサ、距離センサ内蔵装置および距離センサ臨み方向調整方法
【課題】調整量を自動的に計算して簡便かつ容易にその臨み方向を調整できるような距離センサ、距離センサ内蔵装置および距離センサ臨み方向調整方法を提供する。
【解決手段】距離センサ10のレンズ越しにラインイメージセンサ表面の光軸マーカの映像を観察することにより、距離センサ内蔵装置20に対する距離センサ10の臨み方向を求め、基準臨み方向に対する距離センサ10の実際の臨み方向ズレを定量化し、これを用いて臨み方向を修正するような距離センサ臨み方向調整方法とした。
(もっと読む)
ステレオカメラ装置
【課題】左右のレンズの焦点位置合わせの誤差を容易に小さくすることができるステレオカメラ装置を提供する。
【解決手段】一対のレンズ11,16とこの一対のレンズ11,16に対応する一対のCCD12,17とを有するステレオカメラ10を備えているステレオカメラ装置において、一対のレンズ11,16と一対のCCD12,17との間隔を駆動部60で調整する。一対のCCD12,17のうち間隔が調整されたCCD12から出力された特定パターンの画像データとCCD17から出力された特定パターンの画像データとを画像処理部40に入力し、画像処理部40で両画像データの差分を求め、この差分に基づいて駆動部60を制御するようにした。
(もっと読む)
光電センサ
【課題】組立て時における作業性を向上させることができる光電センサを提供する。
【解決手段】センサヘッドは、ベース部材12及びベース部材12に嵌め合わされるカバー部材とから構成される筐体11を備え、該筐体11内には、投光部21、受光部22、及び筐体11内に配置される部品に接続されると共に筐体11外に引き出されるケーブル4の一端が収容されている。投光部21は、その位置調整のためにベース部材12の側方から操作される調整螺子35を備えている。また、ベース部材12は、筐体11内に配置される全ての部品が配置される平板状のベース板14と、該ベース板14の周縁部の一部に立設されてケーブル4の一端側を保持するケーブル保持壁16と、カバー部材をベース部材12に嵌め合わせる前の状態の時にベース部材12の側方に調整螺子35を露出させる露出部19とを備えている。
(もっと読む)
光学式距離測定装置、光学式距離測定の方法
【課題】 本発明は、光学系をシンプルで小型化し、周囲温度の変化の影響を軽減し易い構造として測定精度を向上させた光学式距離測定装置、光学式距離測定の方法を提供することを目的とする。
【解決手段】 被測定面Amと基準面Arとの間の距離を光学的に測定する光学式距離測定装置であって、距離検出部1と距離演算部2とからなり、照射するスポット光とその反射光の中心を同じ直線光軸Oe上になるように構成された距離検出部1と、この反射光の分布量を標準偏差値として求める距離演算部2とを備えることを特徴とする。
(もっと読む)
101 - 110 / 134
[ Back to top ]