
国際特許分類[G01S15/96]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 音波の反射または再放射を使用する方式,例.ソーナ方式 (1,014) | 特定の応用に特に適合したソーナ方式 (582) | 魚群探知用のもの (123)
国際特許分類[G01S15/96]に分類される特許
1 - 10 / 123
魚群探知装置
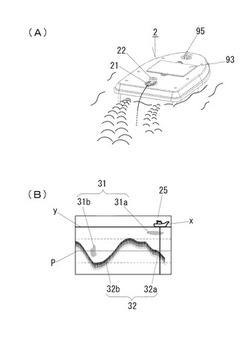
【課題】遠隔操作可能なラジコンボートを用いて魚群を探知する構成で、該魚群のポイントを容易に特定できる魚群探知装置を提案する。
【解決手段】送受波器を備えたラジコンボート2を右旋回すると、画像表示器の反響波表示領域25の右側から左側に向かって過去反響波情報31b,32bを時系列的に表示し、左旋回すると、該反響波表示領域25の左側から右側に向かって過去反響波情報を時系列的に表示するように、左右方向の時間軸線P方向を自動的に反転表示するようにしたことによって、旋回するラジコンボート2の進行方向と反響波表示領域25の時間軸線Pの進行方向とが同じ向きとなるため、操縦者がラジコンボート2から目を離した場合にも、ラジコンボート2の航跡をイメージし易く、魚群を探知したポイントを特定し易い。
(もっと読む)
魚群予測位置表示システム、水中探知装置、記憶装置、魚群予測装置、魚群予測位置表示プログラム、及び魚群予測位置表示方法

【課題】魚群の位置について精度の高い予測を行って表示する魚群予測位置表示システムを提供する。
【解決手段】魚群予測位置表示システムは、取得部81と、出力制御部82と、記憶部71と、魚群予測部74と、表示部と、を備える。取得部81は、魚群状況情報を取得する。出力制御部82は、取得部81が取得した魚群状況情報を記憶部71へ出力する。記憶部71は、出力制御部82が過去に出力した複数の魚群状況情報で構成されるデータベースを有する。魚群予測部74は、前記データベースに基づいて魚群予測位置を出力する。表示部は、魚群予測部が出力した魚群予測位置に基づく映像を表示する。出力制御部82が出力する魚群状況情報には、魚群を検出したときの情報と、魚群が検出できなかったときの情報と、が含まれる。魚群予測部84は、これらの情報の対比に基づいて魚群予測位置を出力する。
(もっと読む)
魚探映像表示装置、魚群探知装置、目的地指定プログラム、及び目的地指定方法
【課題】魚探映像を表示するとともに、過去に取得した魚探映像が示す位置を目的地とする自動操舵を簡単な操作で行わせることができる魚探映像表示装置を提供する。
【解決手段】タッチパネル装置(魚探映像表示装置)11は、記憶部23と、表示部21と、制御部25と、を備える。記憶部23は、魚群探知機14が水中を探知して得られる探知データと、当該探知データを取得した位置と、を対応付けて記憶する。表示部21は、探知データで構成される魚探映像を表示する。制御部25は、表示部が表示する映像に対する指定操作が行われた場合に、指定された部分を構成する探知データに対応する位置を求め、当該位置を目的地とする自動操舵を自動操舵装置16に行わせる。
(もっと読む)
アラーム発生装置、超音波探知装置、アラーム発生方法、超音波探知方法、アラーム発生プログラム、超音波探知プログラム
【課題】ユーザの所望とする魚種が検出されたときにのみ、正確且つ適切に、ユーザへ通知を行う。
【解決手段】超音波パルス信号のエコー信号から探知データを生成する(S101)。探知データに基づいて魚群(単体魚)エコーの検出、深度、底質等の魚種によって特徴が異なる判定用情報を検出する(S102)。魚種に応じて予め設定された複数のアラーム発生条件毎に、判定用情報を検証する(S103)。複数のアラーム発生条件のうち一つでも判定用情報によって満たされていなければ、アラームは発生しない(S104:No)。一方、全てのアラーム発生条件が判定用情報によって満たされていれば(S104:Yes)、アラームを発生して放音する(S105)。
(もっと読む)
水中探知装置、水中探知方法、および水中探知プログラム
【課題】正確に魚種を判別可能な新たな魚種判別機能を備える水中探知装置を提供する。
【解決手段】水中探知装置1の演算処理部14は、取得したエコー信号から単体魚を検出する(S101)。演算処理部14は、検出した単体魚毎に入射角を検出する(S102)。演算処理部14は、入射角を検出した単体魚の反射強度TSを算出する(S103)。演算処理部14は、算出した反射強度TSの入射角特性と、魚種毎に設定されたテンプレート特性曲線とを比較する。演算処理部14は、算出した反射強度TSの入射角特性が最も類似するテンプレート特性曲線に対応する魚種を選択する(S104)。
(もっと読む)
水中探知装置、水中探知方法及びプログラム
【課題】所定レベル以上のエコー信号を取得できない場合でも、信頼性のある水深を取得することができる水中探知装置、水中探知方法及びプログラムを提供する。
【解決手段】送信された信号が水中で反射してなるエコー信号に基づいて、水深を検出する水中探知装置であって、自装置の位置を取得する。位置の水深を示す水深データを取得する。取得した位置及び取得した水深データに基づいて、検出すべき水深を推定する。エコー信号に基づく画像と、推定した水深とを表示する。
(もっと読む)
ターゲット長計測装置、ターゲット長計測方法、およびターゲット長計測プログラム
【課題】目的物標の種類を判別することにより、この目的物標の体長の算出精度を向上させたターゲット長計測装置を提供する。
【解決手段】送信部20が、送受波器10に送信させた超音波信号のエコー信号を受信部30で受信する。魚種判別情報算出部40が、この受信したエコー信号に基づき、目的物標である魚群、または魚体を探知するとともに、その魚群、または魚体の種類を判別する。また、TS計測部51が、受信したエコー信号に基づき、この目的物標のターゲットストレングスを計測する。また、魚体長算出部50が、魚種判別情報算出部40が判別した魚種について、TS標準化値記憶部53に記憶しているターゲットストレングスの標準化値、およびTS計測部51が計測したターゲットストレングスを用いて、魚体長を算出する。
(もっと読む)
水中探知装置、魚群探知機、水中探知方法及びプログラム
【課題】一の装置で、魚又は水深検出及び底質判別の両方を精度よく行うことができる水中探知装置、魚群探知機、水中探知方法及びプログラムを提供する。
【解決手段】魚群探知機1は、送信部14で魚群探知用の送信信号と海底の底質判別用の送信信号とを生成する。生成した送信信号を送受波器16へ出力し、魚用超音波と海底用超音波を送波し、その反射波を受波する。このとき、魚群探知機1は、受波した反射波に係る海底エコーのパルス幅が、魚エコーのパルス幅よりも長くなるようにして、各エコーから、信号処理部19において魚群探知及び海底の底質判別を行う。
(もっと読む)
超音波送受信装置、定量検出方法、および魚量検出方法
【課題】短時間で正確に魚量を計測できる超音波送受信装置を実現する。
【解決手段】魚群探知機に相当する第1超音波送受信部21は、船舶の鉛直下方向へ第1超音波信号を送信し、魚群に反射して得られるエコー信号を出力する。ソナー装置に相当する第2超音波送受信部22は、船舶の下方向の所定範囲に第2超音波信号を送信し、魚群に反射して得られるエコー信号をビーム形成したビームエコー信号を出力する。演算部30は、エコー信号から得られる魚群のエコー強度に関するデータと、エコービーム信号から得られる魚群の大きさに関するデータから、魚量を算出する。
(もっと読む)
探知装置およびプログラム
【課題】必要以上に干渉除去を行わず、従来よりも高精度に干渉の検出を行うことができる探知装置を提供する。
【解決手段】送信信号に対するエコーの強度に応じた受信信号を出力する送受信部と、前記受信信号から、干渉信号を検出する干渉検出部と、を備え、前記干渉検出部は、干渉信号であると判断した受信信号の数に応じて、第1の干渉検出処理から、前記第1の干渉検出処理よりも干渉の検出感度が高い第2の干渉検出処理に切り替える、または第2の干渉検出処理から第1の干渉検出処理に切り替える切替動作を実行する。
(もっと読む)
1 - 10 / 123
[ Back to top ]