
国際特許分類[G01S7/48]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | グループ13/00,15/00,17/00による方式の細部 (3,965) | グループ17/00による方式のもの (457)
国際特許分類[G01S7/48]の下位に属する分類
構造的特徴,例.光学素子の配列 (32)
パルス方式の細部 (5)
非パルス方式の細部
対抗手段または対対抗手段
監視または校正用の手段 (4)
偏光効果を用いるもの
表示装置
国際特許分類[G01S7/48]に分類される特許
81 - 90 / 416
レーザスキャナ
【課題】簡単、軽量な構造で、マルチビームを用いたレーザスキャナを提供する。
【解決手段】パルスビーム12を全周走査するレーザスキャナ1に於いて、該レーザスキャナが本体部3と該本体部に回転可能に設けられた回動部4とを有し、該回動部がパルスビームを該回動部の中心軸に対して垂直方向に偏向して照射する偏向部材15を具備し、前記本体部は、2次元的に配置され、複数のパルスビームを発する複数の発光源11と、パルスビームを投光、受光する光学系6と、前記回動部の水平回転角を検出する回転角検出部19と、対象物からの反射光12′を前記偏向部材を介して受光し、前記発光源とそれぞれ共役の位置にある複数の受光部18と、該受光部からの受光信号に基づき測距を行う測距部9と、前記発光源の配置位置、前記回転角検出部の検出結果に基づき前記偏向部材から照射されるパルスビームの照射方向を演算する制御演算部10とを具備した。
(もっと読む)
移動体

【課題】外部に補正用の基準部材を設置することなく、物体の位置を測定するセンサの取り付け角度ずれに起因する誤差を補正することが可能な移動体を提供する。
【解決手段】車体11に搭載され、走行上計測を必要とする物体が存在する第1の領域及びその他の第2の領域を計測領域とし、物体の位置を計測するセンサ12と、車体11に設けられ、第2の領域の予め決められた位置に配置された基準部材13と、センサ12が計測した基準部材13の位置と予め決められた位置とに基づいて、センサ12の取り付け角度ずれに起因する誤差を補正する補正部22を有し、車体11の移動を制御する制御装置14とを備える。
(もっと読む)
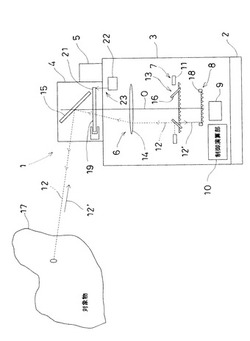
距離測定装置及びプロジェクタ
【課題】 正確な距離測定が可能であって測定可能な距離の範囲が広く、又機構の調整を容易に行える距離測定装置と、該距離測定装置を備えたプロジェクタを提供する。
【解決手段】 プロジェクタは、光源装置と、当該光源装置からの光を表示素子に導光する光源側光学系と、表示素子と、該表示素子から射出された画像をスクリーンに投影する投影側光学系と、距離測定装置1とを備え、光源装置や表示素子を制御するプロジェクタ制御手段を有しているものである。そして、この距離測定装置1は、レーザー光を測距対象に照射するレーザー発光器2と、測距対象からの反射光を集光する受光レンズ4と、この受光レンズ4を透過した測距対象からの反射光を受光する受光素子3と、を有し、レーザー発光器2からの射出レーザー光の光軸位置に受光レンズ4の受光領域を位置させているものである。
(もっと読む)
距離センサ及び距離画像センサ
【課題】シリコン基板を用いた距離センサ及び距離画像センサであって、近赤外を含む波長帯域に実用上十分な感度特性を有する距離センサ及び距離画像センサを提供すること。
【解決手段】距離画像センサ1は、互いに対向する第1主面及び第2主面を有する半導体基板2と、第1主面上に設けられたフォトゲート電極PG及び第1及び第2ゲート電極TX1,TX2と、フォトゲート電極PG直下の領域から第1及び第2ゲート電極TX1,TX2直下に流れ込む電荷をそれぞれ読み出すための第1及び第2半導体領域FD1,FD2と、を備えている。半導体基板2は、第2主面側に高濃度層21を有し、第2主面における少なくともフォトゲート電極PG直下の領域に対向する領域には、不規則な凹凸22が形成されている。第2主面におけるフォトゲート電極PG直下の領域に対向する領域は、光学的に露出している。
(もっと読む)
光レーダ装置
【課題】構造を複雑化させることなく、回転駆動されるポリゴンミラーの回転中心軸方向における所望の角度でレーザ光を照射させることが可能な光レーダ装置を提供する。
【解決手段】ポリゴンミラー42を設置している設置プレート46の傾き角度を変化させる角度調整機構52、及びポリゴンミラー42を回転駆動するモータ44から角度調整機構52への駆動力の伝達、非伝達を切り替えるクラッチ機構50を設けた。これにより、設置プレート46の傾き角度を変化させるための専用の駆動源を設けることなく、設置プレートの傾き角度を変化させることができ、それにより、垂直方向における検出エリアの位置を調整することができる。
(もっと読む)
距離測定装置及び飛翔体位置測定装置
【課題】 鳥類等の飛翔体までの距離及び位置を簡易に測定する。
【解決手段】 レーザー距離計10の接眼レンズ11にリレーレンズ20を介してビデオカメラ30を装着した構成であり、レーザー距離計10の接眼レンズ11に表示される飛翔体の画像をビデオカメラ30のモニタ画面31に表示させることができる。従って、観測者は、レーザー距離計10の接眼レンズ11をのぞき込み、アイポイント位置を保ちながらレーザーを照射する必要はなく、ビデオカメラ30のモニタ画面31を見ながら、レーザー距離計10を操作して飛翔体を追尾でき、飛翔体を追尾しながらのレーザー照射作業が容易となる。
(もっと読む)
光走査装置及び距離測定装置
【課題】反射面を備えた回転反射体の回転軸の傾斜角φが0°の場合に比べて、反射面で反射された走査光による走査軌跡をより柔軟に設定することができる、光走査装置及び距離測定装置を提供する。
【解決手段】基準方向及び基準方向と直交する方向とは異なる方向に光を射出する光源と、回転軸に斜めに交差し且つ光源から入射角θで入射した光を反射する少なくとも1つの反射面を有し、基準方向に対し傾斜角φで傾けられた回転軸の周りに回転する回転反射体と、を備えた光走査装置である。基準方向と予め定めた角度で交差する方向を所定の走査方向として、回転軸の傾斜角φ≠0°で、且つ反射面で反射された走査光の所定の走査方向に対する偏差が回転軸の傾斜角φ=0°で得られる走査光の所定の走査方向に対する偏差より小さくなるように入射角θに応じて前記傾斜角φが予め設定されている。
(もっと読む)
物品支持装置
【課題】体格の大型化を招くことなく概略的な角度を保持しつつ微調整が可能な物品支持装置を提供する。
【解決手段】ヒンジ状に相対的に回転する第一骨格部材21と第二骨格部材22との間には、回転角度調節機構部12が設けられている。第一骨格部材21と第二骨格部材22との回転角度は、。回転角度調節機構部12において、第一嵌合部材31と第二嵌合部材32とが噛み合う部分のピッチに応じておおまかに決定される。これらが嵌合した状態で軸C1を中心にプレート部材33を回転させることにより、第二骨格部材22に対するプレート部材33の角度は微調整される。その結果、第一骨格部材21と第二骨格部材22との相対的な角度は、第一嵌合部材31と第二嵌合部材32との噛み合いによるおおまかな調整と、第二骨格部材22に対するプレート部材33の回転による微調整によって精密に調整される。
(もっと読む)
認識装置
【課題】横切り車両を対象にした状態認識の精度良く行うこと。
【解決手段】レーダ波の反射点の位置座標(x,y)を取得する(S110)。そして、反射点に対して1線分および2線分をフィッティングする(S120)。次に、1線分、2線分のうち、二乗和が小さい方を選択する(S130)。そして、観測値、車長方向先端位置及び車長方向後端位置を算出し(S140)、算出した車長方向後端位置が、走査範囲の端領域に位置するかを判定する(S150)。車長方向後端位置が端領域に位置すると判定すると(S150NO)、車長方向先端位置を用いた状態認識を行う(S170)。車長方向先端位置は、横切り車両が走査範囲の端に位置していたとしても、精度良く把握できるので、状態認識も精度良く行うことができる。
(もっと読む)
一体型レーザ/赤外/可視前方監視装置
【課題】 近年、目標の補足や追尾等を目的として、レーザ、赤外、可視の3種類センサを搭載した前方監視装置が航空機、船舶、陸上車両等に搭載されている。この前方監視装置においては、それぞれのセンサについて更なる高感度化と光軸の高精度の一致が求められている。
【解決手段】 一体型前方監視装置の最も目標側に可視透過、レーザ/赤外反射の可視/レーザ・赤外分離板1を設け、可視/レーザ・赤外分離板1の後段に可視カメラ2を設置する。これにより可視の透過率が向上し、レーザ/赤外共用系においても可視を透過する必要がなくなるため材料の自由度が増して、レーザ光や赤外光の透過率向上や結像性能向上を図ることが可能となる。また、可視/レーザ・赤外分離板1と可視カメラ2を一体としたピッチ回転軸とすることで光軸を高精度かつ安定して一致させることが可能となる。
(もっと読む)
81 - 90 / 416
[ Back to top ]