
国際特許分類[G01V3/17]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 地球物理;重力測定;塊状物または対象物の検出;タグ (3,730) | 電気的または磁気的探鉱または検出;地球の磁場特性,例.偏角または偏差の測定 (1,166) | 輸送中,例.人,車両または舟による,の使用に特に適合したもの (25) | 電磁波で働くもの (7)
国際特許分類[G01V3/17]に分類される特許
1 - 7 / 7
地中レーダ
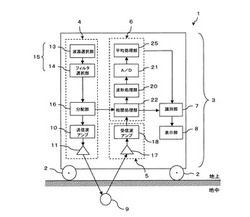
【課題】地中の掘削作業に先立って埋設状況を調査する際に、埋設物の位置を探知するだけでなく、地中の埋設物が金属物体か非金属物体かを識別可能とする地中レーダ。
【解決手段】地中に向けて電磁波を送出する電磁波送信部4と、送出された該電磁波に基づいて反射された電磁波を受信する電磁波受信部5とを有し、該電磁波受信部5によって受信された電磁波に基づき地中に埋設された埋設物9を探知する地中レーダ1において、前記電磁波受信部5で受信された電磁波の受信波形19と前記電磁波送信部4から送出される電磁波の送信波形12との相互相関処理、及び該受信波形19の自己相関処理を行う相関処理部22と、前記相関処理部22により得られる相互相関値と自己相関値との比率を算出し、算出した該比率に基づいて前記地中に埋設された埋設物9が金属物体であるか非金属物体であるかを識別する識別部7とを備えた構成とした。
(もっと読む)
時系列の物理量データの間において、特定の現象に対応して変化する物理量のみを抽出するために、当該特定の現象の発生する範囲の大きさを決定する方法

【課題】長期間に渡る同一領域の観測から、特定の現象に対応して変化する物理量のみを抽出する。
【解決手段】特定の現象に対応して変化する物理量のみを抽出する方法であって、特定の現象において、類似する上記物理量が観察される範囲の半径距離を設定し、複数の時点における、所定範囲内の、全ての基準サンプリング・ポイントの物理量と、サンプリング・ポイントから半径距離だけ離れた所定数の全ての他の参照サンプリング・ポイントにおける物理量の差を、時間の関数である、複数の差分関数群として取得し、それぞれの、差分関数について、(差分関数の最大値)/(差分関数の時間軸に沿った平均値)を、波高率として求め、最も波高率の高い値を持つ差分関数において、差分関数値が最大値をとる時点及びポイントを、特定の現象の発生した時点及び場所として判断するステップを含む方法。
(もっと読む)
移動目標を結像検査するシステム及び避け方法
被検の移動目標が通路に入ったか否か検出するように構成された第1の検出ユニットと、前記第1の検出ユニットにより被検の移動目標が通路に入ったことを検出した後、移動目標のうち保護すべき部分が通路内の放射線走査領域を通過し且つ通過信号を生成したか否かを検出する第2の検出ユニットと、放射線ビームを照射して被検の移動目標を走査し検査する走査結像手段と、前記第2の検出ユニットより受信した通過信号によって、走査結像手段が放射線ビームを生成するように制御するための制御信号を形成する制御系とを備えていることを特徴とする移動目標の結像検査システム。上述の設備を採用すると、快速の移動目標を安全に、且つ信頼に結像し検査する。 (もっと読む)
軌道下構造探査装置
【課題】 マクラギによる反射の影響を小さくする。
【解決手段】 軌道下構造探査装置20は、マクラギ16を備えた軌道14に沿って移動可能な台車22を有する。台車22には、軌道14の下方にむけて電波を放射する少なくとも1つの送信アンテナ10が設けてある。また、台車22には、一対の受信アンテナ12(12a、12b)が取り付けてある。送信アンテナ10と受信アンテナ12とは、軌道14に沿った方向に直列状に配置してある。また、送信アンテナ10と受信アンテナ12とは、軌道14に沿った方向に離間させてある。
(もっと読む)
探査システム
【課題】探査精度を向上することが可能な探査技術を提供する。
【解決手段】本発明の空中曳航体7は、探査対象に関する情報を含む信号を受信する受信センサーを有し、ヘリコプタ等の飛行物体によって空中で曳航される。空中曳航体7は、曳航方向200とは反対方向に向かって細くなる水滴型の本体部71と、当該本体部71の尾部71bを取り囲み、曳航方向200とは反対方向に向かって細くなる筒状の安定翼90とを備えている。
(もっと読む)
座席占有状態識別システムのための評価方法および評価装置
本発明は、座席占有状態識別システムの複数のリフレクタ応答(16a,16b)の評価方法および評価装置に関する。座席(1)の種々の領域のリフレクタ応答(16a,16b)から個々の領域に対応する決定ルールにしたがって判別値が求められる。この判別値が閾値ルールにしたがって分類され、評価結果が求められる。  (もっと読む)
(もっと読む)
地下物体の位置を画像処理の助けにより把握して地図を作成する方法およびこの方法を実施する装置
【目的】 物体の確実な分類と、隙間のない計画通りに正確な三次元位置測定が行え、更に得られた知識を実際に遅れなしに、既存のデジタル化された地図系に移せ、所望の形式で保管できる、地下物体の位置を画像処理の助けにより把握して地図を作成する方法とその装置を提供する。
【構成】 高精度指向装置PVを備えた移動測定系MSが精密方位板と光学基準体ONK1 〜ONKn と関連して地下物体の位置を連続的に、正確に、しかも三次元的に測定し、指向装置PV,光学基準体ONKおよび支持車両TFKの座標系の相対位置を連続的に高精度で検出し、同時に地球物理的なセンサGSで検出した地下物体の精密な位置を図示し、地上や地下の物体のデータを演算処理と記憶のため、遅れなしに中央電算機に入力し、適当なフォーマットにしてデジタル地図系に送って表示する
(もっと読む)
1 - 7 / 7
[ Back to top ]