
国際特許分類[G05D19/02]の内容
物理学 (1,541,580) | 制御;調整 (21,505) | 非電気的変量の制御または調整系 (4,282) | 機械的振動の制御,例.振幅,周波数または位相の制御 (124) | 電気的手段の使用を特徴とするもの (122)
国際特許分類[G05D19/02]に分類される特許
1 - 10 / 122
振動式部品供給装置の制御装置
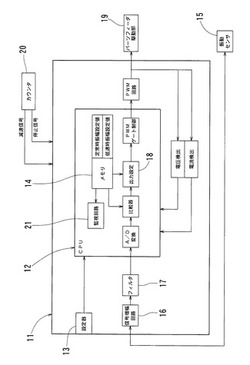
【課題】振動式部品供給装置の振幅フィードバック制御を行う制御装置において、微小な振幅目標値が設定されたときも安定して部品供給装置を駆動できるようにする。
【解決手段】振幅フィードバック制御を行う制御回路11の主要部を構成するCPU12内に、振幅目標値が基準値より大きい定常時振幅設定値から基準値以下の低速時振幅設定値に変更され、変更後の振幅目標値と振幅測定値との差が所定範囲内になったときに、振幅フィードバック制御を停止させる監視回路21を設けた。これにより、微小な低速時振幅設定値が振幅目標値とされても、振幅レベルの小さい領域でハンチングしやすい振幅フィードバック制御が停止するので、安定して部品供給装置を駆動することができる。
(もっと読む)
駆動装置

【課題】可動部材を駆動させた際の振動,騒音等を低減させ又は抑止し得る機構を備えた駆動装置を提供する。
【解決手段】移動可能な可動部材11と、可動部材を移動可能に保持する固定部材23と、固定部材に配置されていて可動部材を固定部材に対して移動させるアクチュエータ14と、アクチュエータによって可動部材が駆動された際に可動部材の移動に基いて固定部材に作用する反作用による振動を低減または抑止するための慣性力を発生させる振動子20と、振動子の振動を制御する制御部21とを備え、制御部は振動子の振動速度が最低速度から最高速度に到達するまでの時間と当該最高速度に到達してから最低速度になるまでの時間が等しくならないように振動子を制御する。
(もっと読む)
共振抑制装置及び共振抑制方法
【課題】共振周波数の変化に関して注意を促す。
【解決手段】本発明のある態様は、共振抑制装置に関する。この装置は、制御系の共振を抑制するために当該制御系に設けられているノッチフィルタと、ノッチフィルタの中心周波数を制御系の共振周波数に一致させるようにノッチフィルタのフィルタ係数を更新するためのフィルタ係数調整部と、を備える。フィルタ係数の更新処理は、ノッチフィルタの既存の中心周波数を基準とする前記共振周波数の変動量が許容範囲にあるか否かを判定することと、変動量が許容範囲外にあると判定される場合には警告を出力することと、を含む。
(もっと読む)
直接的に加速度を検出しない能動的な振動減衰装置
【課題】加速度センサが不要な振動減衰装置を提供する。
【解決手段】能動的な振動減衰装置2は振動性の機械構造体1に対して相対的に移動可能である補償質量3を有する。能動的な振動減衰装置2の制御装置5によって、その制御装置5から供給される測定量に基づいて空間内における機械構造体1の絶対運動が求められ、それを考慮して機械構造体1の振動を減衰させる補償質量3のための補償運動が求められる。機械構造体1上に配置され補償質量3に作用する補償駆動装置4が、制御装置5によって制御され、補償質量3が補償駆動装置4により機械構造体1に対して相対的に移動される。制御装置5に供給される測定量が、補償駆動装置4の実際量および/又は機械構造体1に対する補償質量3の相対的な位置および/又は機械構造体1に対する補償質量3の相対的な位置の少なくとも1つの時間微分を含み、機械構造体1の絶対運動が制御装置5によって求められる。
(もっと読む)
制振装置、振動抑制方法及び制振プログラム
【課題】加振源の状態が変化した場合でも発生する振動の状態を変化前と変わらない状態に保つことができる制振装置を提供する。
【解決手段】不要な振動を抑制するとともに、必要に応じて所定の振動を発生させる制振装置であって、リニアアクチュエータに支持された補助質量を振動させることにより制振対象物を加振する加振手段と、制振対象物を振動させる加振源の周波数を検出する周波数検出手段と、測定点における振動を検出する振動検出手段と、加振源の周波数と前記測定点において検出された振動に基づいて、抑制するべき振動と、発生させるべき振動の指令値を求める演算手段と、抑制するべき振動の指令値と、発生させるべき振動の指令値を重畳させた制御信号を加振手段に出力する制御信号出力手段とを備えるように構成した。
(もっと読む)
振動抑制方法
【課題】加速または減速運動に伴って運動体に生じるn自由度かつ時変の振動を、インプットシェイピング法を適用して効果的に抑制する振動抑制方法を提供する。
【解決手段】運動体に付加された第1の入力によって運動体に生じる第1の応答に、第1の応答の変位が0となる時刻において、第2の入力を運動体に付加して生じる第2の応答を重ね合わせて、互いに打ち消し合うインプットシェイピング法を適用する場合に、n自由度かつ時変の振動における複数のモード間のエネルギの移り変わりのうち、モード間の相互作用によるものを無視し、固有振動数および減衰比の変化によるものを考慮して、第1の入力に対する第2の入力の大きさを決定する。
(もっと読む)
制御装置および制御方法、並びにプログラム
【課題】新たなハードウェアを必要とせず、タクトタイムを変化させることなく、振動を抑制する。
【解決手段】パラメータ生成部102は、基準距離について、予め定めた移動時間毎に、可動部の加速度軌道から共振周波数に対応する周波数成分を除いた軌道を計算するためのパラメータを生成する。データベース103は、パラメータ生成部102から供給されたパラメータを記憶する。パラメータ決定部104は、可動部の加速度軌道から共振周波数に対応する周波数成分を除いた軌道を計算するためのパラメータを決定する。軌道計算部105は、決定されたパラメータから軌道を計算する。本発明は、ロボットを制御する制御装置に適用できる。
(もっと読む)
制振制御装置、制振制御方法およびコンピュータプログラム
【課題】リアルタイムに最適な制御ゲインを同定し、操業中に最適なゲインを適用することが可能な制振制御装置を提供する。
【解決手段】連続的に搬送される帯状の金属板の、搬送方向に直交し、かつ板面に略垂直な方向の振動を抑制する制振装置を制御する制御器を有する本発明の制振制御装置は、制御器の制御ゲインを同定して変更する情報処理装置を備える。情報処理装置は、金属板の搬送方向と直交する方向の変位を検出する検出装置により検出された金属板の変位実績値と、制振装置の操作実績値とを取得するデータ取得部と、変位実績値および操作実績値に基づいて、制振装置の制御モデルを用いて制御器の制御ゲインを同定する制御ゲイン同定部と、同定された制御ゲインに基づいて、所定のタイミングで制御器の制御ゲインを変更する制御ゲイン変更部と、を備えることを特徴とする。
(もっと読む)
アクティブフィードバック制御装置及びプログラム
【課題】制御の対象とする振動数領域の振動を低減するだけでなく、制御の対象としない振動数領域の振動も低減することができる。
【解決手段】アクティブフィードバック制御装置は、ゲインマージンW(s)の最大値が閾値γ以下で且つ振動量の増加量が最大となる最大振動増加量が閾値α以下の場合に、振動数領域における振動量Gc(s)の最大値を評価値とし、その他の場合に無限大を評価値とする予め定めた評価関数によりコントローラの制御特性を表すパラメータの制御性能を表す評価値を算出し、複数の組み合わせのパラメータについて算出した評価値に基づいて、複数の組み合わせのパラメータの中から評価値が最も小さいパラメータを設定する。
(もっと読む)
モータ制御装置
【課題】動作中に振動特性が変化する制御対象に対する振動抑制制御の精度を向上できるモータ制御装置を得ること。
【解決手段】モータ1a及び振動可能要素1bを有する制御対象1の動作を制御して、制御対象の動作を動作目標値に追従するようにモデルトルクτaを生成するフィードフォワード制御部111と、モデルトルクに応じてトルク指令τMを発生させる発生部とを備え、フィードフォワード制御部は、制御対象の振動関連情報に応じて、振動特性を表す振動パラメータθを生成する生成部と、振動パラメータに応じて、動特性を模擬した数式モデル121を変更し、モデルトルクから変更された数式モデルにより、制御対象の動作状態を含むモデル変数を演算する第1の演算部と、モデル変数が一定の追従特性で動作目標値に追従するように、振動パラメータに応じて特性を変化させた演算によりモデルトルクを演算する第2の演算部とを有する。
(もっと読む)
1 - 10 / 122
[ Back to top ]