
国際特許分類[G06T1/00]の内容
物理学 (1,541,580) | 計算;計数 (381,677) | イメージデータ処理または発生一般 (58,387) | 汎用イメージデータ処理 (27,485)
国際特許分類[G06T1/00]の下位に属する分類
プロセッサアーキテクチャ;プロセッサ構成,例.パイプライン (990)
メモリ管理 (517)
国際特許分類[G06T1/00]に分類される特許
871 - 880 / 25,978
移動体検出装置、移動体検出システム及びコンピュータプログラム
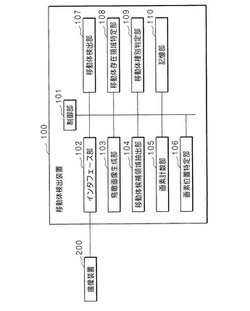
【課題】従来よりもさらに精度良く移動体を検出することができる移動体検出装置、移動体検出システム及びコンピュータプログラムを提供する。
【解決手段】鳥瞰画像生成部103は、透視変換行列を用いて撮像画像を複数の画素で構成される鳥瞰画像に変換する。移動体候補領域抽出部104は、鳥瞰画像の画素値に基づいて、鳥瞰画像上で移動体候補領域を抽出する。移動体検出部107は、抽出された移動体候補領域の境界の近傍で列状をなす列状画素それぞれの位置から所定の向きで走査した所定数の画素のうち、移動体候補領域内に含まれる画素数に基づいて、列状画素を移動体の一部として検出する。
(もっと読む)
印刷情報読取装置

【課題】撮像範囲を一定以上に維持或いはそれ以上に拡大した上で、装置のさらなる薄型化を可能にする。
【解決手段】カメラ10に設けられる接眼レンズを液体レンズ102により構成している。そして、処理部14の制御の下、この液体レンズ102に印加する電圧を変化させることにより液体レンズ102の焦点距離を印刷シート20上の撮像範囲の最も遠い位置から近い位置までの範囲で段階的に変化させて、その時の合焦撮像領域の撮像画像データをイメージセンサ101からそれぞれ取り込み、これらの撮像画像データを合成して印刷シート20上の撮像対象範囲全体を表す合成画像データを生成する。そして、この合成画像データから二次元コードを解読してその解読データを通信部13から送信する。
(もっと読む)
情報取得装置、情報取得方法、およびプログラム
【課題】画像データから同一対象者の顔の変化を検出し、変化の内容を示す情報を取得すること。
【解決手段】対象者の顔を撮影することにより取得した第1画像データと、前記第1画像データを撮像した後に前記被写体の顔を撮像することにより取得した第2画像データとから、それぞれ、人物の顔に含まれる一部であって検出対象として予め決められたパーツを検出する検出部と、前記第1画像データに示される顔の色成分と、前記第2画像データに示される顔の色成分とを比較して、前記第1画像データと前記第2画像データとの色成分の差分を示す差分情報を取得する差分情報取得部と、前記検出部によって検出された各パーツと、前記差分情報が示す色が変化している部分との位置関係に基づき、人物の顔における位置に応じて予め決められている顔内の変化の内容を示す変化内容情報を取得する変化内容情報取得部と、を備える。
(もっと読む)
監視システム、および、混雑率算出方法
【課題】監視システムで、列車の車内などを効果的に監視する。
【解決手段】監視カメラ111〜114によって撮像された映像データ或いは記録装置に記録されている映像データを基に、車両内に存在する人物を検出し、その人物が車両をどれくらい占める割合で検出されたかにより、乗車率Aを判定する。また、監視カメラ111〜114によって撮像された映像データ或いは記録装置に記録されている映像データを基に、乗降車する人数を計測し、最大乗車可能人数に対する現在乗車している人数により、乗車率Bを判定する。そして、これら2通りの方法で算出された乗車率から、平均値を取る等して精度の高い乗車率を判定する。
(もっと読む)
画像処理装置および方法
【課題】より高精度に画像を置換できるようにする。
【解決手段】検出部は、画像から検出対象物を検出する。記憶部は、登録が指示された場合、検出部により検出された検出対象物の画像である置換前画像と、置換前画像と置換される画像である置換後画像とを対応付けた対応定義情報を記憶する。画像合成処理部は、置換が指示された場合、検出部により画像から検出対象物が検出されたとき、対応定義情報に基づいて、前記画像の置換前画像を置換後画像に置換する。
(もっと読む)
車両用画像生成装置及び車両用画像生成方法
【課題】車両周囲画像に含まれる他車両の任意視点から見た画像を、より正確に生成する装置を提供する。
【解決手段】車両用画像生成装置を、3次元構造を有する車両周囲画像に含まれる他車両の可視画像部分の画像情報に基づき、他車両の死角部位の形状や色などの情報を推測する死角情報推測部25と、死角情報推測部25で推測された死角情報に基づき、可視画像部分データから死角部位を補完するための補完画像データを生成し、生成した補完画像データを用いて他車両の死角部位の画像を補完する画像補完部26と、仮想視点設定部27から入力される仮想視点情報に基づき、補完後の車両周囲画像を仮想視点情報の示す視点から見た画像に再構成する画像再構成部28と、を含む構成とした。
(もっと読む)
周囲環境認識装置
【課題】車両周囲の環境認識精度を向上させる。
【解決手段】障害物認識処理部4は、撮像した撮像画像及び地図情報の少なくとも一方に基づき、自車MM周囲に存在し且つ光を透過及び反射の少なくとも一方の作用を有する反射物体を推定する。そして、障害物認識処理部4は、推定した反射物体を参照しつつ、撮像した撮像画像から自車MMの周囲の物体を認識する。
(もっと読む)
接近障害物検出装置及びプログラム
【課題】光源が自車両に接近することを検出して警告する接近障害物検出装置を提供する。
【解決手段】路面反射した光が、光源を起点として、撮影カメラの方向に延びる縦長の楕円形に類する形状を有することに着目して、路面湿潤時に自車両周辺を撮影した画像より、高輝度領域追跡部25が特定の形状からなる高輝度領域の位置及び動きの時間的な変化を検出する。そして、光源接近判定部29は、撮影画像において縦長楕円形で現れる路面反射部分の時間的な移動方向をもとに、自車両に接近してくる光源(自車方向に接近する障害物)を検出する。
(もっと読む)
車両監視装置
【課題】車両監視装置の設置および設置後の位置調整を簡易に行うことのできる車両監視装置を提供する。
【解決手段】走行する車両を監視カメラで撮影し、撮影した画像を解析して前記車両の登録番号あるいは車色を取得する車両監視装置において、前記画像のエッジを検出し、該エッジの傾きから前記監視カメラの傾きを検出する傾き検出部と、前記画像内のナンバープレートの幅を認識し、該認識した幅と前記画像の幅をもとに前記カメラの視野幅を検出する視野幅検出部を備えた画像処理装置を備え、該画像処理装置は、検出した監視カメラの傾きおよび視野幅をもとに、前記監視カメラの傾き、およびカメラと監視対象車両位置との間隔の適否を判定し、否と判定したときその調整方向を指示する情報を表示装置に表示する判定部を備えた。
(もっと読む)
車両検出装置、車両検出システム及びコンピュータプログラム
【課題】輝度変化が少ない場合でも精度よく所定の警告灯を点滅している車両の検出を行うことができる車両検出装置、車両検出システム及びコンピュータプログラムを提供する。
【解決手段】時間差分画像生成部103は、撮像時点が異なる複数の撮像画像の画素値の差分に基づいて時間差分画像を時系列に複数生成する。一致・不一致判定部107は、時間差分画像生成部103で生成した時間差分画像のうちの直近の時間差分画像と他の時間差分画像との所定の画素ブロックの一致/不一致を判定する。車両検出部108は、一致/不一致判定部107で判定した一致/不一致の遷移回数に基づいて車両を検出する。
(もっと読む)
871 - 880 / 25,978
[ Back to top ]