
国際特許分類[G06T1/00]の内容
物理学 (1,541,580) | 計算;計数 (381,677) | イメージデータ処理または発生一般 (58,387) | 汎用イメージデータ処理 (27,485)
国際特許分類[G06T1/00]の下位に属する分類
プロセッサアーキテクチャ;プロセッサ構成,例.パイプライン (990)
メモリ管理 (517)
国際特許分類[G06T1/00]に分類される特許
911 - 920 / 25,978
駐車枠の認識装置、駐車枠の認識方法、及び、プログラム
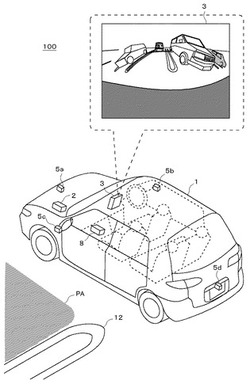
【課題】駐車場に描かれた駐車枠12の形状を車両へ送信する駐車場側の通信設備を不要とし、駐車枠の認識が可能な駐車場を増やして有効に駐車枠を認識する。
【解決手段】駐車枠の認識装置2が、複数の駐車枠の形状のいずれかをユーザの操作に基づいて選択する。そして、選択した駐車枠の形状に基づいて、車両外部を示す画像中の駐車枠12を認識する。駐車枠の認識装置2が駐車枠12を認識すると、駐車支援システム100は駐車枠12で区画される駐車領域PAへ車両1を誘導し、駐車支援を行う。したがって、駐車場に描かれた駐車枠12の形状を車両へ送信する駐車場側の通信設備を不要とすることができる。かかる通信設備を不要とすることにより、駐車枠の認識が可能な駐車場を増やし、有効に駐車枠を認識することができる。
(もっと読む)
位置検出装置、位置検出方法及びコンピュータプログラム

【課題】検出対象の位置を精度良く検出する位置検出装置を提供する。
【解決手段】所定の位置で所定の向きに設置された撮像装置によって撮像された第一の画像から、検出対象に含まれる第一特徴点eye_2l及び第二特徴点eye_2rの平面座標の位置を検出し、第一特徴点及び第二特徴点の空間座標の位置を取得し、第一特徴点と第二特徴点との間の平面座標における距離と空間座標における距離との比を算出し、撮像装置によって撮像された第二の画像から、検出対象に含まれる第一特徴点及び第二特徴点の平面座標の位置を検出し、距離比と、第二の画像における第一特徴点及び第二特徴点の平面座標と、に基づいて第一特徴点及び第二特徴点の空間座標の位置を検出する。
(もっと読む)
撮像装置、撮像装置の制御方法、三次元計測装置、およびプログラム
【課題】サンプリングピッチを細かくすることなく、少ないサンプリング数でより高精度に交点を算出する。
【解決手段】明部および暗部を有する第1のパターンまたは第2のパターンを投影パターンとして対象物へ投影する投影部と、投影パターンが投影された対象物を撮像素子に輝度分布として結像させる撮像部と、を備え、輝度分布は明部に対応する第1の輝度値と暗部に対応する第2の輝度値とを有し、第1のパターンおよび第2のパターンは明部の位置または暗部の位置が重複する重複部を有し、第1のパターンに対応する第1の輝度分布および第2のパターンに対応する第2の輝度分布は重複部で同輝度値となる交点を有し、交点の輝度値は第1の輝度値および第2の輝度値の平均値と所定値だけ異なる。
(もっと読む)
関数算出装置、デプスマップ生成装置、関数算出方法及び関数算出プログラム
【課題】ノイズの影響等を軽減させて、ステレオペアの相関関数を精度良く算出することができる関数算出装置、デプスマップ生成装置、関数算出方法及び関数算出プログラムを提供する。
【解決手段】関数算出装置110は、参照視点画像及び複数の近傍視点画像を受信する正規化部111と、参照視点画像及び近傍視点画像をステレオペア毎に平行化する正規化部111と、平行化したステレオペアの視差を正規化する正規化部111と、視差を正規化したステレオペアの参照視点画像及び近傍視点画像に、マッチングウィンドウを定めるウィンドウ設定部112と、マッチングウィンドウ間の1次元POC関数を、視差を正規化したステレオペア毎に算出する関数算出部113と、1次元POC関数のうち、相関ピークの高さが閾値以上である1次元POC関数を統合する関数統合部114と、を備える。
(もっと読む)
渦巻きばねの形状を算出するための画像処理装置、方法、及びプログラム
【課題】 渦巻きばねの撮影画像から芯線を正確に抽出する。
【解決手段】 画像処理装置は、渦巻きばねを撮影した撮影画像を入力する画像入力手段と、入力された撮影画像から渦巻きばねの輪郭線を抽出する輪郭線抽出手段と、抽出された輪郭線を極座標変換する座標変換手段と、極座標変換された輪郭線に対して、その輪郭線上を一方向に移動しながら一巡したときの「輪郭線の角座標値列(θ1,θ2,・・,θn)」を取得する角座標値列取得手段と、取得された「輪郭線の角座標値列」を用いて、内フック領域及び外フック領域を特定するフック領域特定手段を有している。
(もっと読む)
画像処理装置および画像表示システム
【課題】標本の高さ方向が異なる画像において、高さ方向に垂直な平面間の撮像領域のずれを補正して、高精度の全焦点画像および3次元画像を構築することができる画像処理装置および画像表示システムを提供すること。
【解決手段】固定された軸に沿って移動しながら撮像された一群の画像をもとに全焦点画像および/または3次元画像の構築処理を行う画像処理部33であって、一群の画像において、各画像における軸に垂直な平面内のずれの検出を行なう検出部331と、検出部331の検出結果に応じてずれの補正を行う補正部332と、固定された軸に沿って移動して撮像された画像および/または補正部332で補正された画像を含む一群の画像をもとに、全焦点画像および/または3次元画像を構築する画像構築部333と、を備えた。
(もっと読む)
画像処理装置、撮像システム、画像処理システム
【課題】デジタル画像を利用した検体観察において、検体の奥行き方向の情報を維持し、且つコンピュータによる画像解析処理に適した画像を生成するための技術を提供する。
【解決手段】画像処理装置が、構造物を含む検体を焦点位置を変えながら撮像することにより得られた複数の原画像を取得する画像取得手段と、前記複数の原画像をもとに、原画像よりも構造物の像のボケが低減された第1の画像を生成する画像生成手段と、前記第1の画像に対し画像解析処理を適用することによって、前記第1の画像に含まれる構造物に関する情報を取得する解析手段と、を備える。前記画像生成手段は、前記検体から得られた前記複数の原画像の内から、前記検体の厚さよりも小さい深度範囲内に焦点位置が含まれる原画像を選択し、前記選択された原画像を用いて前記第1の画像を生成する。
(もっと読む)
車両周辺監視装置
【課題】カメラとレーダ装置の組み合わせにより物体の実空間位置を算出するときに、車両と物体間の距離の誤検出により、不適切な実空間位置の算出がなされることを防止した車両周辺監視装置を提供する。
【解決手段】物体距離検出部21によりレーダ装置12の測距データから検出された物体をカメラの撮像画像に投影して、該物体の画像部分を検出する画像部分検出部22と、物体距離検出部21による検出距離に基づいて、物体の実空間位置を算出する実空間位置算出部23と、前記検出範囲内に存在する格子フェンスを検出する半透過物体検出部25と、カメラ11の撮像方向で、格子フェンスと重なる位置に存在する物体については、実空間位置算出部23による実空間位置の算出を禁止する実空間位置信頼性判定部24とを備える。
(もっと読む)
車両周囲画像撮像システム
【課題】車両周囲画像撮像システムにおいて、高性能な演算処理装置を必要とせず、かつ適正に周囲画像を補正する。
【解決手段】カメラ傾斜角センサ20(第1の検出器)によって検出されたカメラ10の傾き角度αiと車両傾斜角センサ40(第2の検出器)によって検出された車両200の傾き角度βとの差γi(傾き角度差分値)が、予め設定された基準値Γi(初期値や設計値等)から変化したときは、その変化量Δγi(ずれ量)に応じて俯瞰画像(周囲画像)の補正を行うものであり、差γiを算出する演算処理は軽負荷であるため高性能な演算処理装置を必要とせず、また、カメラ10の傾き角度αiの変化のみに応じて俯瞰画像の補正を行うのではなく、車両200の傾き角度βとの相対的な関係γiの変化に応じて補正を行うため、適正に俯瞰画像を補正する。
(もっと読む)
媒体処理装置
【課題】曲がりやすい第1媒体の処理と同様に曲がり難い第2媒体の読み取り処理を装置手前側から操作性よく行い得る媒体処理装置を提案すること。
【解決手段】媒体処理装置1は、媒体挿入口4aから挿入される第1媒体S1を、装置前後方向の後方に向けて案内した後に再び前方に向けて案内して媒体排出口5aまで導く媒体搬送路P1を有し、媒体排出口5aに繋がる部分には装置幅方向の内側に傾斜する直線状搬送路P13が形成され、媒体排出口5aには直線状搬送路P13から前方に直線状に延長している第2媒体挿入路15が繋がっている。媒体排出口5aからの第1媒体S1の排出方向は装置前後方向Yであるので、排出される第1媒体S1に干渉することなく、斜め前方から第2媒体Cを第2媒体挿入路15に挿入して直線状搬送路P13に送り込み、第1媒体読取用の光学式読取部43を利用して第2媒体Cの画像の読取ができる。
(もっと読む)
911 - 920 / 25,978
[ Back to top ]