
国際特許分類[G08G1/04]の内容
物理学 (1,541,580) | 信号 (47,547) | 交通制御システム (25,881) | 道路上の車両に対する交通制御システム (25,491) | 計数または制御されるべき交通量の検出 (1,848) | 光学式または超音波式検出装置を用いるもの (558)
国際特許分類[G08G1/04]に分類される特許
441 - 450 / 558
車種判別装置

【課題】外形的特徴と異なる通行料金が設定された車両の料金を自動処理することを可能にする。
【解決手段】車種判別装置は、バスに例示される乗合型車両の通行料金を適切に処理するために用いられる。路線バスにおいては、本来車両の大きさ等の条件からは特大型車両に分類される車両を、その公共性から大型車両に分類するという特例があり、外形的特徴量を用いた自動的な車種判別が困難となっている。そこで、車種判別不能で利用地域が限定される車両に対しては、ナンバープレート情報を計測することで個々の車両を特定し、上記の車両毎に車種情報を車種判別装置に登録しておき、これを用いて車種判別を行うことで、車種判別を実行する。
(もっと読む)
ナンバープレート読取装置、および、ナンバープレート読取制御方法

【課題】交通状況が変化しても、ナンバーの認識率を向上させる。
【解決手段】道路上を走行または停止している車両の前方の斜め上部から車両のナンバープレートが撮像され、撮像された画像が処理されて、ナンバープレートのナンバーが認識され、車両の閑散または渋滞の交通状況が判別され(S111,122,132,142)、ナンバーが認識され易いように、閑散であると判断した場合、カメラの俯角が15°に変化されることにより、撮像範囲が制御され、渋滞であると判断した場合、カメラの俯角が15°よりも深い30°に変化されることにより、撮像範囲が制御され(S122〜124,132〜134,142〜144)、車線に対する車両の走行位置が判別され(S112)、判別された走行位置に応じて、カメラの回転角が変化されることにより、撮像範囲が制御される(S121,123,124,131,133,134,141,143,144)。
(もっと読む)
車両感知システム、点検装置、および点検方法
【課題】精度が低下したことを的確に判断する。
【解決手段】車両感知システム50は、画像式車両感知器52と、超音波式車両感知器54と、点検装置56とを含む。超音波式車両感知器54は、画像式車両感知器52とは異なる原理により、車両の有無を感知し、車両の有無に対応する情報を出力する。点検装置56は、超音波式車両感知器54が出力した情報と、画像式車両感知器52が出力した情報とに基づいて、画像式車両感知器52の感知の精度が低下したか否かを判断する。
(もっと読む)
速度計測装置、方法及びプログラム
【課題】計算コストを低くするとともに、背景画像間に濃淡差がある場合でも移動体の抽出が容易である速度計測装置、方法及びプログラムを提供する。
【解決手段】航空機に搭載したカメラを用いて、道路上の白線に沿って移動する車両が画面の中央部分に存在する空撮画像を取得し、取得した空撮画像に基づいて車両の速度を計測するに際し、白線検出部11は、特定幅の線を抽出し、白線を、画面の水平方向に対する角度に基づいて選別し、同一直線上に並ぶ白線を互いに連結してグループ化する。車両領域位置検出部12は、グループ化された白線に挟まれた領域を車両領域として抽出し、車両領域の中における車両の位置を検出する。白線選択及び点線データ取得部13は、車両に隣接し、白線間を分ける点線のデータを取得する。速度計算部2は、白線の位置及び点線のデータに基づいて車両の速度を計算する。
(もっと読む)
車両検知装置、および、車両検知方法
【課題】背景を車両と誤検出する可能性を減少させる。
【解決手段】車両や背景から放射された遠赤外線の強度に応じて発生された起電力に対応する入力電圧とリファレンス電圧との差の電圧が増幅され、増幅された電圧に応じた入力レベル値と閾値とに基づいて車両の有無が判別され(S113,120,130,141)、増幅された電圧に応じた入力レベル値に基づいて、車両が無いと判別された入力レベル値を示す背景レベルが算出され(S150)、増幅された電圧に基づいて、その電圧の範囲が差動アンプの出力電圧範囲となり、背景レベルに応じた電圧の範囲が出力電圧範囲の中程の範囲となるように、リファレンス電圧が変化される(S163)。
(もっと読む)
時間に依存してルートを計画する方法及びナビゲーションデバイス
本発明は、固定の事前定義済みルート区間コスト(例えば、法定制限速度)を有する地理的な有効範囲を可能な場合は時間に依存するより高いコストと組み合わせる。従って、例えば携帯ナビゲーションデバイスのユーザは、格納された地図データベースが範囲に含む地方の任意の目的地までのルート計画を以前と同様に継続でき、可能であれば、時間に依存するコストを含む交通データを更に使用でき、時間的に予測可能な渋滞の影響が自動バックグラウンドプロセスとして正確に考慮される。それにより、ユーザは、現在存在する渋滞及びそれが行程に影響を与えるかに関して考慮する必要なく、ナビゲーションデバイスにより提供される案内に従って運転し続けられる。 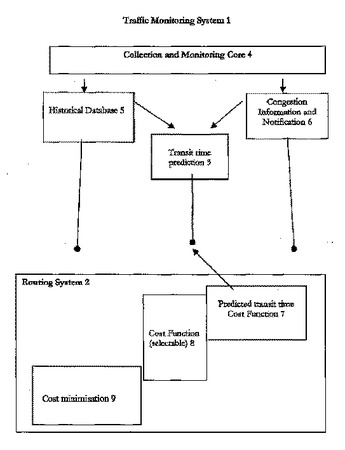 (もっと読む)
(もっと読む)
交通流計測装置
【課題】 特にトンネルなどの囲まれている箇所における車両の交通流の計測を効率的に行うことのできる交通流計測装置を提供する。
【解決手段】 所定の周期で画像を撮像する画像撮像部10と、画像から車両を検出する車両検出部11とを備え車両の検出データから交通情報を作成する交通流計測装置において、車両検出部11は、車両のライト光の輝度値の飽和値の中心点を検出して車両の検出を行うとともに、撮影箇所の背景画像と車両の影の輝度値とから車両の影の中心点を検出して車両の検出を行うものである。
(もっと読む)
領域監視システム及び領域監視方法
【課題】画像処理により検出対象の自動検出を行う領域監視のシステム及び方法において、静止した検出対象を確実に発見する。
【解決手段】カメラで撮影して得た画角の画像データであって当該画角に対応する領域内に検出対象が存在しない状態のものを、比較画像データとして画像処理装置10内に記憶しておき、カメラの現画像データと比較画像データとを比較して、その差に基づいて、領域内に検出対象が存在するか否かを判定する。
(もっと読む)
交通渋滞計測システムおよび交通渋滞計測方法
【課題】比較的広い範囲における渋滞状況を判定可能であり、かつ、設置や保守の容易な、交通渋滞計測システムおよび交通渋滞計測方法を提供する。
【解決手段】交通渋滞計測システムでは、カメラ1,2の2台のカメラを用いて道路が撮影され、これらのカメラが撮影する画像に基づいて、渋滞状態が計測される。カメラ1の撮影領域は、撮影領域1Aで示され、カメラ2の撮影領域は、撮影領域2Aで示されている。そして、交通渋滞計測システムでは、撮影領域1Aおよび撮影領域2Aにおける渋滞領域が判定されることによって、領域3Aも含めた判定領域3Xの渋滞領域の判定が行なわれる。
(もっと読む)
運転支援システム
【課題】 どのテレビカメラの映像を待機車両内に映し出すかを自動的に選択することでドライバの負担を軽減するようにした運転支援システムを提供する。
【解決手段】 路上機ごとに、それぞれ異なるチャンネルおよびIDが設定されており、車載機は、地図データに基づいて、車両60が走行する道路51の道路IDから交差点50に進入する車両60の進入方向を得ると共に、交差点50に繋がる道路のうち、車両60の進入方向に対する対向車線52aを撮影した映像の映像信号を送信する路上機10のIDを得て、そのIDに対応したチャンネルを設定し、そのチャンネルで受信した映像信号の映像を表示装置にて表示させる。
(もっと読む)
441 - 450 / 558
[ Back to top ]