
国際特許分類[H02P27/04]の内容
電気 (1,674,590) | 電力の発電,変換,配電 (135,566) | 電動機,発電機,回転変換機の制御または調整;変圧器,リアクトルまたはチョークコイルの制御 (18,002) | 供給電圧の種類に特徴を有する交流電動機の制御装置または制御方法 (4,413) | 可変周波数の供給電圧,例.インバータまたはコンバータ供給電圧,を使用するもの (4,344)
国際特許分類[H02P27/04]の下位に属する分類
回転子および固定子回路の双方に交流が供給され,少なくとも一方の回路へ供給されるその周波数が可変である交流電源を使用するもの (5)
直流−交流コンバータまたはインバータを用いるもの (2,642)
直流への中間変換部を備えない交流−交流変換器を使用するもの (31)
国際特許分類[H02P27/04]に分類される特許
51 - 60 / 1,666
モータ制御装置
【課題】加速・減速や負荷トルク変動を含む広い動作領域で、磁束指令に対する磁束の追従遅れを補正し、所定のトルクを出力させ、加速性能および制御性能の向上が図れるモータ制御装置を得ること。
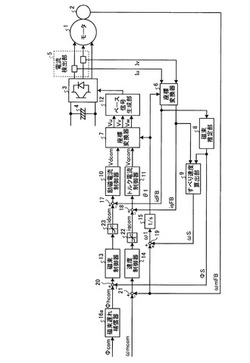
【解決手段】外部から入力される磁束指令Φcomと磁束推定部8が推定した推定磁束ΦSとの偏差が小さくなるようにする励磁電流指令を生成する磁束制御器13を備え、誘導モータ1をベクトル制御により駆動制御するモータ制御装置において、磁束指令Φcomに基づいて磁束遅れ補正指令Φhcomを生成する磁束遅れ補償器16aを設け、磁束遅れ補正指令Φhcomは、減算器20において磁束指令Φcomに代えて磁束推定部8が推定した推定磁束ΦSとの偏差を取るのに用いる。
(もっと読む)
電力変換装置

【課題】交流一周期に出力するPWMパルス数の減少による、基本波成分における電圧出力誤差拡大の影響を回避する。
【解決手段】べクトル切り替え位相角およびゼロ電圧ベクトル出力角度幅を、ベクトル切り替え位相角を電圧位相角とする第一の複素ベクトルと、ゼロ電圧ベクトル出力角に応じた位相角に2/3πの位相遅れおよび位相進み処理を行った第二、第三の複素ベクトルの三種類のベクトルの合成ベクトルが、虚数成分が0、且つ、実数成分が前記電圧指令値の振幅に比例した値となるよう決定する。
(もっと読む)
永久磁石形同期電動機の制御装置
【課題】過渡状態においても磁極位置検出回路を用いずに磁極位置と速度を正確に演算する。
【解決手段】回転子に同期した直交回転座標軸γδ軸を定義し、高周波電圧を前記γ軸基本波電圧指令値に加算してγ軸電圧指令値を印加する。検出した電動機電流δ軸成分微分値から前記高周波電圧と同じ周波数のフーリエ級数を演算し、位置推定誤差を演算する。
(もっと読む)
回転電機制御システム
【課題】回転電機制御システムにおいて、回転電機の回転数の急変時に、制御切替を迅速に行うことで、回転電機に過電流が流れることを有効に抑制することである。
【解決手段】回転電機制御システム10は、回転電機(第2モータジェネレータ)14と、回転電機14の所定時間当たりの回転数を測定する回転数センサ34と、制御部32とを含む。制御部32は、回転数の測定結果に応じて、回転電機14の制御方法の切り替えの際に用いる制御切替閾値である制御切替位相を変更する閾値変更部48を有する。
(もっと読む)
回転機の制御装置
【課題】モータジェネレータ10を流れる電流が大きくなることで、モデル予測制御の制御性が低下すること。
【解決手段】予測部33では、モード設定部31によって仮設定されたスイッチングモードのそれぞれに応じた予測電流ide,iqeを算出する。モード決定部34では、予測電流ide,iqeと指令電流id*,iq*との乖離が小さいものを最終的なスイッチングモードに決定する。操作部28では、インバータINVのスイッチングモードをモード決定部34の決定に従わせる。ここで、予測部33は、予測電流ide,iqeの予測に用いる電圧方程式における電流の時間微分の係数として、過渡インダクタンスLdt,Lqtを用いる。それらは、電流と電気角速度ωとの積の係数としての定常インダクタンスLds,Lqsとは相違する。
(もっと読む)
回転機の制御装置
【課題】電流センサの出力値に実際の電流の振幅に対して所定の比率(≠1)だけ相違する誤差であるいわゆるゲイン誤差が含まれる場合、これに起因してモデル予測制御の制御性が低下するおそれがあること。
【解決手段】偏差算出部40,44では、予測電流ide,iqeのそれぞれと同位相の実電流id,iqとの差が算出される。フィードバック制御部42,46のそれぞれでは、偏差算出部40,44の出力値をゼロにフィードバック制御するための操作量(補償量idcomp,iqcomp)が算出される。これら補償量idcomp,iqcompによって、予測部33によって予測される予測電流ide,iqeが補正される。
(もっと読む)
回転電機制御装置
【課題】制御装置の演算負荷の増加を抑制しつつ、エイリアシングに起因して検出される周波数成分が、電流フィードバック制御に与える影響を抑制して、回転電機を制御する。
【解決手段】交流周波数成分を含む実電流をサンプリングして検出電流を取得するサンプリング周期STを設定するサンプリング周期設定部と、サンプリング周期STに応じて実電流をサンプリングして検出電流を取得する電流サンプリング部と、所定の周波数領域の周波数成分の入力に応答するように応答領域Rが設定され、検出電流と目標電流とに基づいて電流フィードバック制御を行う電流制御部とを備え、サンプリング周期設定部は、エイリアシングに起因して検出される検出電流の複数のエイリアシング周波数の少なくとも1つが、電流制御部の応答領域R外となるように、回転電機の回転速度に応じてサンプリング周期STを設定する。
(もっと読む)
回転機の制御装置
【課題】モデル予測制御を用いる場合、スイッチングモードの更新可能タイミングの都度、スイッチングモードを最適なものに変更することが可能であることから、スイッチングモードの切り替え頻度が高くなるおそれがあること。
【解決手段】予測部33では、モード設定部31によって仮設定されたスイッチングモードのそれぞれに応じて、モータジェネレータ10を流れる電流と指令電流id*,iq*との差ベクトルのノルムが閾値rとなるまでの所要時間Tsを予測する。モード決定部34では、所要時間Tsが最も長いものを最終的なスイッチングモードに決定する。操作部28では、インバータINVのスイッチングモードをモード決定部34の決定に従わせる。
(もっと読む)
モータ制御システム
【課題】矩形波制御実行中にコンバータによる昇圧動作の開始を適時に行ってシステム損失の増加を抑制することができるモータ制御システムを提供する。
【解決手段】モータ制御システムは、電源、コンバータ、インバータおよび交流モータと、コンバータおよびインバータの作動を制御することにより、正弦波PWM制御、過変調制御および矩形波制御のいずれかの制御方式でモータを駆動させる制御部とを備える。制御部は、電源から供給される直流電圧をコンバータで昇圧せずにインバータに供給し、モータについて、モータ電流のd軸q軸平面上における電流ベクトルの電流位相が最適電流進角またはその近傍で矩形波制御が実行されるように制御する。この場合において、制御部は、電流ベクトルが昇圧開始前後でシステム損失が等しくなるモータトルクT2に相当する電流位相になったときにコンバータによる昇圧動作を開始させる。
(もっと読む)
駆動装置
【課題】モータの絶縁破壊を抑制する。
【解決手段】正弦波制御や過変調制御(パルス幅変調制御)によってインバータを制御するときで変調率αが閾値αref以上のときには(S120,S130)、正弦波制御や過変調制御(パルス幅変調制御)によってインバータを制御するときで変調率αが閾値αref未満のときや、矩形波制御によってインバータを制御するときの上限電圧VHlim(=VH1)に比して低い上限電圧VHlim(=VH1・β)を設定する(S150)。そして、設定した上限電圧VHlim以下の範囲内で駆動電圧系電力ラインの電圧VHを調節する(S160,S170)。
(もっと読む)
51 - 60 / 1,666
[ Back to top ]