
国際特許分類[H02P6/08]の内容
電気 (1,674,590) | 電力の発電,変換,配電 (135,566) | 電動機,発電機,回転変換機の制御または調整;変圧器,リアクトルまたはチョークコイルの制御 (18,002) | 回転子の位置に依存する電子整流子を有する同期電動機または他の電動機の制御装置;それに用いる電子整流子 (4,020) | 単一電動機の速度またはトルクの制御装置 (1,166)
国際特許分類[H02P6/08]の下位に属する分類
国際特許分類[H02P6/08]に分類される特許
81 - 90 / 896
ファンモータの駆動装置およびそれを用いた冷却装置、電子機器
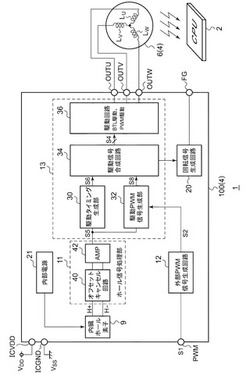
【課題】ファンモータの駆動回路の小型化にある。
【解決手段】3相ブラシレス直流モータであるファンモータ6を駆動する駆動装置100が提供される。内蔵ホール素子9は、ファンモータ6に近接して配置され、ファンモータ6のロータの位置に応じたホール信号のペアを生成する。内部電源21は、内蔵ホール素子9にバイアス信号を供給する。ホール信号処理部11は、ホール信号のペアのオフセットをキャンセルするとともに、ホール信号を増幅する。駆動処理回路13は、ホール信号処理部11の出力信号にもとづきファンモータ6を駆動する。駆動装置100は、ひとつの半導体基板に一体集積化される。
(もっと読む)
アクチュエータ、モータ制御システム、及びモータ制御方法

【課題】信頼性又はロバスト性を向上したアクチュエータ、モータ制御システム、及びモータ制御方法を提供する。
【解決手段】アクチュエータは、モータと、モータの回転角を検出する回転角センサと、モータの回転を所定の変位に変換する被駆動機構と、被駆動機構の変位を検出する位置センサと、モータを制御する制御装置と、を含み、制御装置は、正常時における回転角センサの回転角信号及び位置センサの変位信号の相対関係情報を記憶しており、変位信号を取得し、相対関係情報に基づいて回転角を推定した推定回転角信号を演算し、推定回転角信号に基づいてモータを制御する。
(もっと読む)
モータの制御装置
【課題】指令速度電圧がばらついた場合でもモータの効率を向上できるモータの制御装置を得ることを目的とする。
【解決手段】モータの制御装置は、指令速度で動作するようにモータを制御するモータの制御装置であって、前記モータを駆動する駆動部と、前記指令速度に応じて、電気位相の進角量をステップ的に制御する進角制御部と、前記制御された進角量で進角させた電気位相を用いて、前記駆動部を制御する駆動制御部とを備え、前記進角制御部は、前記指令速度に応じた指令速度電圧が閾値より小さい場合、前記進角量を第1の値に決定し、前記指令速度電圧が前記閾値より大きい場合、前記進角量を前記第1の値より大きい第2の値に決定する。
(もっと読む)
モータの駆動制御装置
【課題】構成が比較的に簡素であって、演算処理における回路構成および処理プロセスを簡素化でき、モータの高精度な駆動制御を行うことができるモータの駆動制御装置を提供する。
【解決手段】モータの駆動制御装置1は、進角指令情報5及び速度指令情報6などの2つの動作指令情報が入力される信号合成部4と、指令情報復元処理部8と、駆動信号生成部9と、出力部10とを有し、出力部10からモータ2に電力を供給する。信号合成部4は、パルス信号の周波数情報とデューティ情報とを合成した複合指令信号S1を出力する。複合指令信号S1は、1つの伝送経路7を介して指令情報復元処理部8に入力される。指令情報復元処理部8は、複合指令信号S1の周波数情報及びデューティ情報に基づいて2つの動作指令情報を復元する。復元された情報に基づいて、駆動信号生成部9から出力部10に駆動信号S6が出力され、駆動信号S6に応じて、出力部10がモータ2を駆動する。
(もっと読む)
電動工具
【課題】 力率改善回路を備えずに力率を改善することのできる電動工具を提供する。
【解決手段】 電動工具1は、複数の固定子巻線U、V、Wを有し、電圧が印加された場合に所定の誘起起電圧が発生するブラシレスモータ5と、交流電圧を整流する整流回路10と、整流された交流電圧を、誘起起電圧よりも小さな最小値を有する脈動電圧に平滑する平滑コンデンサ11と、スイッチング動作を行うことにより脈動電圧を固定子巻線U、V、Wに順次出力するインバータ回路8と、を備えたことを特徴としている。
(もっと読む)
電動機およびそれを搭載した電気機器
【課題】圧力損失など静圧が変化しても風量の変化量が極めて少ない高精度な風量−静圧特性を実現した上で、湿度の変化に応じて、湿度が高い場合は送風量を多くできる送風装置を実現できる電動機の提供を目的としている。
【解決手段】磁石回転子3の磁極部3aをポリアミド6樹脂にて形成することで、同一分子長においてアミド基が多いために、アミド基と水素結合する水分子が、さらに湿度が高い領域では周囲の水分子を引きつけ、水分子−水分子の水素結合を形成して膨潤するため、磁石回転子3の磁極部3aの外径は大きくなり、エアーギャップ18は小さくなることとなり、駆動コイル2に誘起される誘起電圧は高くなり、駆動コイル2に供給する電流が同一であれば、誘起電圧が高くなった分、軸トルクは高くなる電動機とすることができるので、常湿時に対して高湿時には換気風量が増加する風量−静圧特性が得られる。
(もっと読む)
制御装置、モータ制御装置、画像形成装置及び電流制御指示プログラム
【課題】過電流によるトランジスタの破損を防止する。
【解決手段】固定子巻線11a〜11cと、励磁される固定子巻線が切り換えられることにより回転する回転子と、回転子の回転位置を検出するホール素子13a〜13cとを、有するブラシレスDCモータと、電流を流すか否かが切り換えられることにより励磁する固定子巻線を切り換えるトランジスタ20a〜20fと、ホール素子により検出された回転位置から励磁する固定子巻線の切り換えタイミングを検出して電流を流すトランジスタを切り換えるプリドライバ50と、を備えるモータ制御装置101の主制御装置140であって、ホール素子により検出された回転位置から励磁される固定子巻線の切り換えタイミングを検出し、検出後一定期間、プリドライバ50に、トランジスタに流れる電流を小さくさせる。
(もっと読む)
モータの制御装置
【課題】PWM制御されたモータにおいて、コイルに接続された端子の電圧が基準電圧を超えるときの回転子の位置を正しく行なってモータを制御する装置を提供する。
【解決手段】モータの制御装置は、前記基準時刻から将来における直近の位置検出までの時間を算出する次回位置検出推定時間算出手段と、前記次回位置検出推定時間算出手段での算出結果と、モータの制御指令電圧及びPWM制御のキャリア信号の周波数に基づいて将来における直近の位置検出推定時刻である次回位置検出推定時刻がPWM信号のオン区間に到来するか否かを判定する判定手段と、前記判定手段により次回位置検出推定時刻がPWM信号のオン区間に到来しない場合は、PWM制御のキャリア波形を変更するキャリア波形変更手段として機能させる。
(もっと読む)
モータ駆動回路
【課題】単相ブラシレスDCモータの起動時の回転数が安定するとともに、逆起電圧および騒音の発生を抑制する。
【解決手段】モータ1の制御部13は、位置推定部14と、カウンタ部15と、出力波形生成部16と、PWM生成部17とを有する。モータ1の起動時のソフトスイッチング動作として、コイル7に一定のデューティ比のパルス状の駆動電圧を印加する期間T3の直後に、時間の経過とともにパルス幅が小さくなる駆動電圧を印加する期間T4を設けるため、コイル7への逆起電力の発生を確実に防止でき、騒音が軽減され、振動も抑制できる。
(もっと読む)
モータ制御装置
【課題】単一の電流検出素子によりモータに供給される各相の電流を、騒音を増大させること無く検出する。
【解決手段】本実施形態のモータ制御装置は、インバータ回路の直流側に接続され電流値に対応する信号を発生する電流検出素子と、キャリア信号とデューティに基づきPWM信号パターンを生成するPWM信号生成手段と、3相の各相が所定の制御期間であるかを判定し、制御期間に該当する相についてキャリア信号の位相またはデューティの値を制御する制御手段と、電流検出素子に発生した信号と前記PWM信号パターンとに基づいて、モータの相電流を検出する電流検出手段とを備え、3相のうち少なくとも1つの前記スイッチング素子のオン、オフ状態が変化した時刻から抵抗素子に発生した信号を読み込むまでの最小待機時間をτとしたとき、制御手段は、2つの相電流がτ時間以上同時に流れる区間と、前記2つの相電流の少なくとも一方がτ時間以上単独に流れる区間との組み合わせとなるように、キャリア信号の位相またはデューティの値のいずれかを制御する。
(もっと読む)
81 - 90 / 896
[ Back to top ]