
国際特許分類[H02P6/08]の内容
電気 (1,674,590) | 電力の発電,変換,配電 (135,566) | 電動機,発電機,回転変換機の制御または調整;変圧器,リアクトルまたはチョークコイルの制御 (18,002) | 回転子の位置に依存する電子整流子を有する同期電動機または他の電動機の制御装置;それに用いる電子整流子 (4,020) | 単一電動機の速度またはトルクの制御装置 (1,166)
国際特許分類[H02P6/08]の下位に属する分類
国際特許分類[H02P6/08]に分類される特許
41 - 50 / 896
モータ制御システム
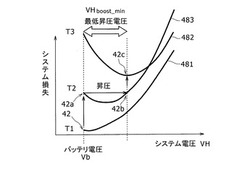
【課題】矩形波制御実行中にコンバータによる昇圧動作の開始を適時に行ってシステム損失の増加を抑制することができるモータ制御システムを提供する。
【解決手段】モータ制御システムは、電源、コンバータ、インバータおよび交流モータと、コンバータおよびインバータの作動を制御することにより、正弦波PWM制御、過変調制御および矩形波制御のいずれかの制御方式でモータを駆動させる制御部とを備える。制御部は、電源から供給される直流電圧をコンバータで昇圧せずにインバータに供給し、モータについて、モータ電流のd軸q軸平面上における電流ベクトルの電流位相が最適電流進角またはその近傍で矩形波制御が実行されるように制御する。この場合において、制御部は、電流ベクトルが昇圧開始前後でシステム損失が等しくなるモータトルクT2に相当する電流位相になったときにコンバータによる昇圧動作を開始させる。
(もっと読む)
モータ駆動装置

【課題】外部からアナログの制御電圧によって、PWM出力電圧デューティの演算を行い、そのPWM演算器のオフセット、ゲインばらつきの影響に対して、モータ速度を一定とするモータ駆動装置を提供すること。
【解決手段】モータ制御端子の電圧がV1「V」〜V2「V」の範囲の時に前記PWM演算器の出力電圧デューティをD1%とし、同様にV2「V」〜V3「V」の範囲の時にD2%、・・・、VN「V」〜VN+1「V」の範囲の時にDN%とするモータ駆動装置である。
(もっと読む)
インバータ制御装置と電動圧縮機および電気機器
【課題】PWM信号のデューティ値が小さくPWM信号がオンとなる時間が短い場合、強制的に転流を継続する強制同期転流によってモータの運転状態を維持し、インバータ出力電圧に対する誘起電圧位相の状態に応じてインバータ出力電圧を変化させることで、強制同期転流時の安定したモータ動作を実現すること。
【解決手段】出力電圧に対するロータ誘起電圧位相を所定の位相に保つ位相差判定手段210と、ブラシレスDCモータの目標回転数に応じて所定の周波数で予め設定した転流波形を出力する強制同期転流制御手段211を備え、PWM制御デューティ値が所定の値より小さくなった場合、強制同期転流により動作するとともにロータ位相の変化状態に応じて出力電圧を変化させるので安定したモータ動作を実現することができる。
(もっと読む)
回転電機制御装置、および、これを用いた操舵制御システム
【課題】簡単な構成で、回転電機の駆動停止時に発生するラジオノイズを低減可能な回転電機制御装置を提供する。
【解決手段】マイコン41は、各相の巻線11、12、13に流す目標電流値を算出する。マイコン41は、算出した目標電流値に基づき、各相の巻線毎にパルス状のPWM信号を生成する。プリドライバ42およびインバータ30は、マイコン41により生成されたPWM信号に基づき、各相の巻線11、12、13に電圧を印加する。マイコン41は、モータ10の駆動を停止させる制御をするとき、全ての各相のPWM信号のパルス変化のタイミングと、他の各相のPWM信号のパルス変化のタイミングとがいずれも異なるようにPWM信号を生成する。
(もっと読む)
モータ制御装置
【課題】電動車両がスリップを起こした場合にモータ50の過電流を抑制すると共に、トルクの減少を抑制する。
【解決手段】電動車両を駆動するモータ50の回転数Nとトルク指令値Trqcomに応じてモータ50に印加する電圧波形を矩形波形又は非矩形波形に設定するマップを含み、マップに基づいてモータ50を制御する電動車両のモータ制御装置であって、電動車両がスリップしたと判定した際に、マップの矩形波形を印加する領域の中に矩形波形を印加することを禁止する矩形禁止領域Aを設定し、モータ50の回転数Nとトルク指令値Trqcomとが矩形禁止領域Aに入った場合に、モータ50に印加する電圧波形を矩形波形から非矩形波形に切り替えるとともに、モータ50の制御方式を最大トルク制御から弱め界磁制御に切り替える。
(もっと読む)
インバータ制御装置、インバータ装置、及び空気調和機
【課題】スイッチング損失を低減するとともに、制御方式の切り替えを円滑に行うことを目的とする。
【解決手段】2アーム変調方式を採用し、正弦波状の基準電圧指令信号を補正して第1電圧指令信号を生成する第1信号生成部21と、正弦波状の基準電圧指令信号にその第3次高調波成分を重畳させた波形の振幅の最大値が搬送波の振幅以上になるような過変調方式による第2電圧指令信号を生成する第2信号生成部22と、第1信号生成部21の基準電圧指令信号の振幅が、該基準電圧指令信号の最大振幅値に設定された第1閾値未満の場合に第1電圧指令信号を選択し、該基準電圧指令信号の振幅が該第1閾値と等しい場合に第2電圧指令信号を選択する選択部23と、選択部23によって選択された電圧指令信号と搬送波とを比較することによりパルス幅変調信号を生成するPWM信号生成部とを備えるインバータ制御装置を提供する。
(もっと読む)
モータ駆動回路
【課題】 PWM信号のキャリア周波数を基本波とする高調波成分の影響を低減する。
【解決手段】 モータの回転子の回転位置を示す位置信号に基づいて前記モータの駆動コイルへの通電位相を制御する位相制御回路と、前記通電位相に応じたパルス幅変調信号を生成するパルス幅変調回路と、前記パルス幅変調信号に応じて前記駆動コイルに駆動電流を供給する出力回路と、前記通電位相に応じて前記パルス幅変調信号の周波数を切り替える周波数切替回路と、を有する。
(もっと読む)
モータ制御システム
【課題】1つのコンバータの出力電圧で複数のモータを駆動するモータ制御システムにおいて、各モータに対応して行われるフィードバック制御同士の干渉を防止してシステム電圧の可変制御を安定して滑らかに行えるようにする。
【解決手段】モータ制御システムは、コンバータと、2つのインバータと、2つの交流モータと、制御部とを備える。制御部は、少なくとも一方のモータついて、モータ電流のd軸q軸平面上における電流ベクトルの電流位相が最適電流進角またはその近傍で矩形波制御されるようにシステム電圧を電流位相のフィードバック制御により可変するにあたり、電流ベクトルからそれぞれ求めたシステム電圧偏差が大きい方のモータをフィードバック制御の対象として選択する(S20〜S28)。
(もっと読む)
交流電動機の駆動装置およびそれを搭載する車両、ならびに交流電動機の制御方法
【課題】変調PWM制御および正弦波PWM制御を切換えて制御する交流電動機の駆動装置において、交流電動機の回転速度が急変した場合の緊急切換動作時におけるトルク急減を抑制する。
【解決手段】車両100は、ECU300によってPWM制御を用いてインバータ130が制御されてモータジェネレータ140を駆動することによって走行する。ECU300は、正弦波PWM制御および過変調PWM制御を含む複数の制御モードを切換えてインバータ140を制御する。ECU300は、過変調PWM制御を実行中に、駆動輪160がスリップ状態からグリップ状態に変化することに伴って電流が急増した場合に、過変調PWM制御から正弦波PWM制御に強制的に切換えるとともに、正弦波PWM制御における変調率の上限値を緩和して、正弦波PWM制御において通常時よりも大きなトルクが出力できるようにする。
(もっと読む)
電力変換装置の制御装置
【課題】 インバータを利用したモータ駆動システムにおいて、同期PWMモードでのインバータの運転時に、トルク不足の問題を発生させることなく、モータの損失の増加を回避し、効率低下を抑える。
【解決手段】 インバータ制御部110は、インバータ40のスイッチング素子のON/OFF切替を行うためのゲート信号の生成モードとして、非同期PWMモードと同期PWMモードとを有する。直流電圧指令値演算部143は、インバータ制御部110が同期PWMモードでゲート信号を生成している場合に、インバータ40からモータ50に供給される電流のうちd軸電流が0または負になるように、DC−DCコンバータ20からインバータ40に供給する直流電圧を指示する指令値を演算する。
(もっと読む)
41 - 50 / 896
[ Back to top ]