
国際特許分類[H02P6/08]の内容
電気 (1,674,590) | 電力の発電,変換,配電 (135,566) | 電動機,発電機,回転変換機の制御または調整;変圧器,リアクトルまたはチョークコイルの制御 (18,002) | 回転子の位置に依存する電子整流子を有する同期電動機または他の電動機の制御装置;それに用いる電子整流子 (4,020) | 単一電動機の速度またはトルクの制御装置 (1,166)
国際特許分類[H02P6/08]の下位に属する分類
国際特許分類[H02P6/08]に分類される特許
21 - 30 / 896
モータ制御装置、モータ制御方法
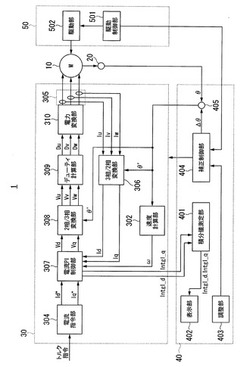
【課題】モータを精度良く制御することを可能にするモータ制御装置、及びモータ制御方法を提供することを目的としている。
【解決手段】電流指令値から、電圧指令値を生成し、モータに流れる検出電流によりフィードバック制御するモータ制御装置であって、モータが一定速度で回転されているとき、d軸電流指令値及びq軸電流指令値を各々零に設定する補正制御部と、電流指令値と検出電流との偏差の積分値を生成する電流制御部と、生成された積分値を測定する積分値測定部と、を備え、補正制御部は、測定された積分値が予め定められている範囲内の値となるように調整することで前記モータの回転位置に対する補正値を調整する。
(もっと読む)
回転電機制御システム

【課題】回転電機制御システムにおいて、電流センサの検出電流値に誤差が重畳している場合でも、過電流及び過電圧の発生を有効に防止することである。
【解決手段】回転電機制御システム10は、回転電機であるモータジェネレータMG2と、リアクトル20を含むDC/DCコンバータ14と、DC/DCコンバータ14に接続された平滑コンデンサC1,C2と、正弦波PWM制御方式または過変調制御方式または矩形波制御方式でインバータを制御する制御部18とを含む。制御部18は、正弦波PWM制御方式の実行時に、LC共振回路の共振周波数領域の周波数とモータジェネレータMG2のパワー変動の周波数とが一致したときに、インバータ16の入力電圧VHを低下させ、インバータ16の制御方式を正弦波PWM制御方式から過変調制御方式または矩形波制御方式に切り替える電圧低下制御部30を有する。
(もっと読む)
ブラシレスモータ制御方法及びブラシレスモータ制御装置並びにブラシレスモータ並びに電動パワーステアリング装置
【課題】d軸方向とq軸方向のインダクタンスに差があるモータにおいて、高負荷側のトルクだれを防止し、モータのトルク向上や小型化を図る。
【解決手段】ブラシレスモータ3は、多角形状の断面を有するロータコアと、ロータコアの外周の各辺部分に取り付けられたセグメントマグネットとを備えるロータコアを有し、d軸方向のインダクタンスとq軸方向のインダクタンスが異なる。ブラシレスモータ3の制御装置50は、電流センサ61と、負荷状態に応じて巻線電流値を算出する電流指令部51とを有する。電流指令部51は、電流センサ61にて検出した相電流値に基づいて、電機子反作用の影響によって理論トルクに対して出力トルクが減少する高負荷領域にて進角制御を行い、電機子巻線に対する供給電流にd軸電流Id’を付加する供給電流量算出部52と、相電流と進角値との関係が示された進角制御マップ63を有する。
(もっと読む)
モータ駆動装置
【課題】モータ性能を向上するモータ駆動装置を提供することにある。
【解決手段】モータ駆動装置100は、モータを駆動するモータ駆動信号を生成する駆動信号生成部120と、この駆動信号生成部120の前段に設けられ、プルアップ動作時、駆動信号生成部120のスイッチがオン/オフする時発生される電磁波妨害によって引き起こされるモータの振動またはノイズを防止するように、駆動信号生成部120の電流を調節する電流制御部110と、駆動信号生成部120から出力されるモータ駆動信号に基づいてモータを駆動する駆動部130とを含む。
(もっと読む)
モータ制御装置
【課題】安定性を確保した位置センサレスの正弦波通電が可能なモータ制御装置を提供する。
【解決手段】モータ制御装置は、単相交流電源を入力とする整流回路と、整流回路と接続され、整流回路で得られた直流電力を三相交流電力に変換し、接続されるモータを駆動するインバータと、小容量のコンデンサと、インバータを制御する制御装置と、単相交流電源のゼロクロス点を検出するゼロクロス点検出回路とを備え、制御装置は、モータの回転数を設定する回転数設定手段と、モータの回転数を補正する第1の回転数補正手段と、第1の回転数補正手段とは異なる方式でモータの回転数を補正する第2の回転数補正手段と、ゼロクロス点の検出からの経過時間に応じて第1および第2の回転数補正手段の一方を選択する回転数補正選択手段とを含む。
(もっと読む)
電動車両の制御装置
【課題】複数のモータが同一の駆動軸にトルクを付加する電動車両において、必要なトータルトルクに対して、それぞれのモータのトルク分担を少ない計算負荷で適切に決定することが可能な技術を提供する。
【解決手段】本明細書は、同一の駆動軸にトルクを付加する2以上のモータを備える電動車両の制御装置を開示する。それぞれのモータは、制御方式が切替え可能である。その制御装置は、必要なトータルトルクから、それぞれのモータのトルク分担を計算する際に、それぞれのモータの制御方式の組み合わせに応じて、トルク分担の計算に用いるトルクマップを選択し、必要なトータルトルクと、選択されたトルクマップを用いて、それぞれのモータのトルク分担を計算する。
(もっと読む)
電動機の制御データ更新方法と制御装置
【課題】電動機の個体差に応じてマップのデータを最適化できるようにする。
【解決手段】トルクと駆動電流及び電流位相角との関係を示すマップを参照して、目標トルクが出力されるように同期電動機の駆動装置を制御しつつ(S1)、当該同期電動機の出力軸に取り付けたトルク測定器で実トルクを測定する(S2)。この実トルクの測定結果に基づいて、目標トルクが出力されているか否か判断し(S3)、目標トルクが出力されていない場合に、現在の駆動電流の電流位相角を変更してトルク測定器で実トルクを測定することにより、当該測定トルクが最適値になる電流位相角を決定し(S4〜S6)、この決定した電流位相角に基づいてマップを更新する(S7)、電動機の制御データ更新方法を提案する。
(もっと読む)
モータ制御装置およびモータ制御方法
【課題】パルス幅変調制御方式によるPWM制御モードと、矩形波制御方式によるワンパルス制御モードとを有するモータ制御装置において、パルス幅変調制御方式と矩形波制御方式とを通じて適切に電流オフセットを抑制できるようにする。
【解決手段】低周波成分抽出部151は、インバータ168がモータMに供給する電流のうち低周波成分を抽出する。また、ゲイン設定部140は、低周波成分抽出部151が抽出した低周波成分に作用させるゲインを、PWM制御モードにおけるゲインが、ワンパルス制御モードにおけるゲインよりも小さくなるように設定する。そして、オフセット補正部165は、低周波成分抽出部151が抽出した低周波成分に、ゲイン設定部140が設定したゲインを作用させて得られるオフセット補正指令値に基づいて、インバータ168がモータMに供給する電流のオフセットを低減させるオフセット補正を行う。
(もっと読む)
モータ駆動制御装置および空調機器
【課題】停止時を含む低速域から高速域まで回転子の位置検出ができ、電流歪みが小さく、かつ、中性点電位の検出が不要な、位置センサレス制御を行う。
【解決手段】180度通電手段(制御手段)6が、180度通電でPWM制御されたパルス信号をインバータ3へ供給すると、インバータ3の各スイッチ素子Sup〜SwnがPWM制御されてスイッチングされる。これによりインバータ3から交流モータ1へPWM制御された三相交流電流が供給される。このとき、調整手段8は、交流モータ1の運転状態(回転速度、トルク、モータ電流、モータ印加電圧等)に応じて、停止手段7から出力される180度通電のパルス信号の停止期間を変化させる。これにより、停止手段7は、180度通電手段6からインバータ3へ供給されるパルス信号のうち、調整手段8で設定された停止期間に相当する期間だけ、所定の相のパルス信号の送信を停止させる。
(もっと読む)
モータ制御回路及びモータ制御システム
【課題】モータをスムーズに回転させることができるモータ制御回路を提供する。
【解決手段】一実施形態によれば、モータ制御回路は、回転位置デコード部と、回転位置判定部と、モータ駆動信号生成部と、を備える。前記モータ制御回路は、センサで検出されたモータの回転位置に応じて当該モータを制御する。前記回転位置デコード部は、前記センサから供給されたセンサ信号に応じて、前記モータの回転位置を表す回転位置信号を生成する。前記回転位置判定部は、前記回転位置信号に基づいて前記モータの現在の回転位置を記憶して、前記回転位置信号が、記憶された当該現在の回転位置の次の回転位置を表した時に、記憶された当該現在の回転位置を当該次の回転位置に更新すると共に、当該次の回転位置を表すモータ制御信号を生成する。前記モータ駆動信号生成部は、前記モータ制御信号に応じて、前記モータを駆動するモータ駆動信号を生成する。
(もっと読む)
21 - 30 / 896
[ Back to top ]