
国際特許分類[H02P6/08]の内容
電気 (1,674,590) | 電力の発電,変換,配電 (135,566) | 電動機,発電機,回転変換機の制御または調整;変圧器,リアクトルまたはチョークコイルの制御 (18,002) | 回転子の位置に依存する電子整流子を有する同期電動機または他の電動機の制御装置;それに用いる電子整流子 (4,020) | 単一電動機の速度またはトルクの制御装置 (1,166)
国際特許分類[H02P6/08]の下位に属する分類
国際特許分類[H02P6/08]に分類される特許
51 - 60 / 896
ブラシレス電気機械、それを備える装置、移動体、発電機、及びロボット
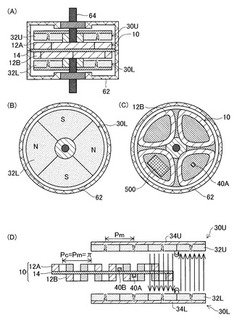
【課題】ブラシレス電気機械における磁場の利用効率を高めて電気機械の効率を向上させる技術を提供する。
【解決手段】本発明によるブラシレス電気機械は、複数の永久磁石32Uを有する第1の駆動部材30Uと、複数の電磁コイルを有し第1の駆動部材30Uに対して相対的に移動可能な第2の駆動部材10と、第2の駆動部材10を挟んで第1の駆動部材30Uと反対側に配置され、第1の駆動部材30Uとの相対的な位置関係が固定された第3の駆動部材30Lとを有する。第2の駆動部材10には、第1と第2の駆動部材の相対位置を検出する磁気センサ40A,40Bと、磁気センサの出力信号を利用してブラシレス電気機械の制御を行う制御回路とを備える。第3の駆動部材30Lは、第1の駆動部材30Uの各永久磁石と対向する位置に、各永久磁石と共同して第2の駆動部材10の位置における磁場を強める磁場強化部材32Lを有する。
(もっと読む)
モータ制御システム

【課題】交流モータにおいて最適電流進角ライン上か又はその近傍での電流位相による矩形波制御を積極的に用いることによってシステム全体の損失を効果的に低減する。
【解決手段】モータ制御システム10は、バッテリ11からの直流電圧を昇降圧可能なコンバータ20と、コンバータ20による昇圧直流電圧を交流電圧に変換するインバータ22と、インバータ22から交流電圧が印加されて駆動される交流モータM1と、入力されるトルク指令値に応じてコンバータ20およびインバータ22を作動制御することにより交流モータを矩形波制御等の複数の制御方式で駆動制御可能な制御部26とを備える。制御部26は、交流モータM1が矩形波制御中であるとき、交流モータM1に流れるモータ電流のd軸q軸平面上における電流ベクトルの電流位相(id,iq)が最適電流進角ライン上に近づくようにシステム電圧指令値VH*を補正する。
(もっと読む)
回転機の制御装置
【課題】モータジェネレータ10を流れる電流の検出値をフィードバック制御するための操作量としての指令電圧の1電気角周期に渡る積分値をゼロにフィードバック制御する場合、電気角の検出値に誤差が生じることで、電流の検出値に重畳されたオフセット誤差を適切に補正できないこと。
【解決手段】モデル予測制御部30では、モデル予測制御によってインバータINVの今回の操作状態を表現する電圧ベクトルViを選択する。積分値算出部40では、電圧ベクトルViを入力とし、各相の印加電圧の積分値Δvu,Δvv,Δvwを算出する。補正部44u,44v,44wでは、これらをゼロにフィードバック制御すべく実電流iu,iv,iwを補正する。
(もっと読む)
電気モータ
【課題】電気モータの複数のコイルを適切に冷却する。
【解決手段】電気モータは、モータの磁場を発生するように配置された一つまたは複数のコイルセットを含む。電気モータは、電流制御のためにコイルのそれぞれのコイルサブセットに接続された複数の制御装置も含む。同様の構成が、発電機についても提案される。電気モータまたは発電機用のコイル取り付けシステムは、モータのコイルを巻き取り可能に受け入れる一つまたは複数のコイル歯と、複数のコイル歯を取り外し可能に受け入れる後部とを含む。それぞれのモータで独立して駆動される複数の車輪を有する車両のトラクション制御システムおよび方法が提供される。各車輪が車両のサスペンションアームに取り付けられそれぞれのモータで独立して駆動される複数の車輪を有する車両のサスペンション制御システムおよび方法が提供される。
(もっと読む)
回転機の制御装置
【課題】デッドタイム付与後の実際のスイッチング状態の切替タイミングが複数のレッグ間で重なることで、サージ電圧が大きくなるおそれがあること。
【解決手段】ノルム設定部30では、要求トルクTrと電気角速度ωとに基づき、インバータINVの出力電圧ベクトルのノルムを設定する。位相設定部26では、推定トルクTeを要求トルクTrにフィードバック制御するための操作量として位相δを設定する。操作状態設定部34では、ノルム設定部30によって設定されたノルムVnと、位相設定部26によって設定された位相δとに基づき操作信号を生成してインバータINVに出力する。操作状態設定部34には、デッドタイム付与後における実際のスイッチング状態の切り替えが複数レッグで同時になされない波形が記憶されている。
(もっと読む)
回転電機制御システム
【課題】回転電機制御システムにおいて、実変調度となまし変調度との間に乖離が生じても、PWM制御モードと過変調制御モードとの間の制御モード切替に際し、過大な電流が生じることを抑制することである。
【解決手段】回転電機制御システム10は、回転電機20と、回転電機20を駆動する電源回路ブロック12と、電流フィードバックの制御ブロック22と、制御装置40で構成される。制御装置40は、実変調度と、なまし変調度とを求める変調度取得部42と、実変調度となまし変調度の間について予め定めた所定条件に基づいて、PWM制御モードと過変調制御モードとの間で制御モードを切り替える制御モード切替部44を含んで構成される。
(もっと読む)
モータ制御装置および電動パワーステアリング装置
【課題】非干渉化制御を行っても応答性および追従性を低下させることなく、制御動作も安定なモータ制御装置および電動パワーステアリング装置を提供する。
【解決手段】モータ(1)の回転角度を微分してモータ回転角速度を演算するモータ回転角速度演算手段(60)と、そのモータ回転角速度を信号処理するローパスフィルタ(63)を有する。そして、モータの回転角度と、ローパスフィルタのゲインの関係を示すマップ(61)から演算された値により、ローパスフィルタ(63)のゲインを変更するローパスフィルタゲイン変更手段(80)を有する。そして、ゲインが変更されたローパスフィルタ(63)に基づいて出力されるモータ回転角速度に基づき、モータの逆起電力により発生する電流を相殺するように、モータに電流を流す非干渉制御を実行する。
(もっと読む)
駆動装置および電動車両
【課題】パルス幅変調制御によるインバータの制御から矩形波制御によるインバータの制御への切替時にインバータの制御性が低下するのを抑制する。
【解決手段】インバータをPWM制御によって制御するか矩形波制御によって制御するかに拘わらず、電圧位相指令θs*の今回値と前回値との差分としての電圧位相指令変化量Δθsが変化許容値θslim以下となるよう電圧位相指令θ*を設定し(S330〜S430)、設定した電圧位相指令θs*を用いて次の切替電気角θswやスイッチングパターンを設定する(S440,S450)。
(もっと読む)
制御装置
【課題】トルク指令に周期的なトルク振動が含まれる場合であっても、電流指令に対する追従性能を向上させるとともに、矩形波制御の実行が開始される場合に、矩形波の出力電圧波形の位相が急変することを防止できる交流回転電機の制御装置が求められる。
【解決手段】電流フィードバック制御部は、トルク振動の周波数の周期関数の特性を有する高調波モデルを用いた演算の出力値に少なくとも基づいて二相電圧指令を算出し、矩形波制御の実行が開始された場合は、トルク振動の周期に応じて設定された期間内でゼロとなるように、高調波モデルを用いた演算の出力値を徐々に変化させる減衰処理を実行する制御装置。
(もっと読む)
スイッチング回路の制御装置
【課題】スイッチング回路の損失を低減させる。
【解決手段】所定のスイッチング周期において、ハイ側スイッチング素子のオンデューティとロー側スイッチング素子のオンデューティとを独立に設定可能なPWM演算部25を備え、PWM演算部25は、前回までの複数のスイッチング周期におけるオンデューティの積算値を算出する通電割合演算部25aを備える。PWM演算部25は、通電割合演算部25aによって算出されたオンデューティの積算値に基づいて、順方向電流が流れていないスイッチング素子のオンデューティを設定する。
(もっと読む)
51 - 60 / 896
[ Back to top ]