
分光測定方法及び分光測定装置

【課題】多くのバンド数を測定可能でかつ測定時間が短時間ですみ、また、各バンドの分光画像の位置ずれがない分光測定方法を提供する。
【解決手段】基準カメラC1と、参照カメラC2、C3を用いて被測定物100を撮影して、それぞれのカメラにより基準画像データ及び参照画像データを作成し、前記参照カメラにより作成された参照画像データを前記基準カメラC1の位置から撮影したように射影変換し画像中の被測定物上の任意の点を示す座標が前記基準カメラで撮影された基準画像データの被測定物上の同一点上の座標を示すような変換画像データを作成し、前記基準カメラで撮影された前記基準画像データと前記変換画像データとの座標を共有化して、当該座標上における被測定物上の任意の点の分光データを作成する。
【解決手段】基準カメラC1と、参照カメラC2、C3を用いて被測定物100を撮影して、それぞれのカメラにより基準画像データ及び参照画像データを作成し、前記参照カメラにより作成された参照画像データを前記基準カメラC1の位置から撮影したように射影変換し画像中の被測定物上の任意の点を示す座標が前記基準カメラで撮影された基準画像データの被測定物上の同一点上の座標を示すような変換画像データを作成し、前記基準カメラで撮影された前記基準画像データと前記変換画像データとの座標を共有化して、当該座標上における被測定物上の任意の点の分光データを作成する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、工業生産プロセスにおける分光分析による検査分野において画像検査を行う分光測定方法及び分光測定装置に関し、特に紫外、可視、赤外の各波長において分光分析による画像検査を行う分光測定方法及び分光測定装置に関する。
【背景技術】
【0002】
工業生産プロセスにおいて、製品の表面をカメラで撮影し、当該表面性状を検査する画像検査が広く行われている。当該画像検査は、波長特性が異なる複数の波長を用いて測定される分光分析により行われる場合がある。ここで、波長特性が異なる複数の画像を得るためには、従来以下のような方法が行われている。
【0003】
第1の方法は、例えば、特開2003−309858号公報(特許文献1)に開示されているように1台のカメラに複数(例えば、3つ)の固体撮像素子を有する複数板式カメラを用い、それぞれの固体撮像素子に入射する光路上に特定波長の光のみを透過させるバンドパスフィルタを設ける方法である。この方法は、1台のカメラを用い、当該カメラに搭載されている固体撮像素子の数のバンド数で分光画像を得ることができる。また、各撮像素子に入射される光は、共通する光軸によりカメラに入射することとなるため、各バンドの画像は、光軸のずれによる位置のずれがなく、各バンドの画像データの位置が一致した画像を得ることができる。よって、特定の画像上の測定点の座標を他の画像の測定点の画像と共有することができるため、分光データの活用が容易となる。
【0004】
第2の方法は、1台のカメラの前に波長特性の異なる複数のフィルタを備えたフィルタ切り替え機構があり、撮影時に特定波長の光のみを透過させるバンドパスフィルタを切り替えながら撮影を繰り返し行う方法である。この方法によれば、フィルタ切り替え機構に設けられたフィルタの数だけ分光データを得ることができ、多くのバンド数の分光データを得ることができる。
【0005】
第3の方法は、例えば、特開平10−300580号公報(特許文献2)に開示されている。この方法は、1台のカメラを用いるのであるが、その内蔵されているCCDに結像されるデータは、X軸方向が波長情報で、Y軸方向が測定物体の位置情報である。この場合、内蔵している回折格子の分光能力と、CCDのX軸方向のアレイ数で、分光データ数が決定するが、1回測定で得られるデータは、測定物体の線領域だけで面情報を得るためには、カメラ自体を線情報と垂直方向にスキャンさせて測定を行い続け、その測定回数分と移動距離で決定される分解能の画像データが得られるようにしたものである。
【特許文献1】特開2003−309858号公報
【特許文献2】特開平10−300580号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
しかし、第1の方法は、1台のカメラに搭載することができる固体撮像素子の数に限界があり、現状では例えば、RGBの3つ、多くても4波長までの分光データしか得られない。固体撮像素子をこれ以上に増やすと、光学系の構造が複雑になり、実用的ではないという問題がある。
【0007】
また、第2の方法は、バンド数の数だけ、撮影を繰り返し行う必要があるため、測定時間が非常に長くなり、得られるバンド数の画像は、それぞれ同じタイミングで撮影されたものではないという問題がある。したがって、動きのある被測定物の分析には不利である。また、カメラの光軸上でバンドパスフィルタを切り替えるための機械系部分が必須であるため、長期にわたる信頼性が低く、また、コストが高くなるという問題がある。
【0008】
また、第3の方法は、第1、第2の方法に比べれば、分光データ数は飛躍的に増える。数100から数1000の分光データの取得も可能である。しかし、物体面の高速測定という点では、1軸方向へのスキャンが必要なため第1の方法には及ばない。ただ、線方向のデータ取得はカメラレートであるので高速である。
【0009】
第2の方法との比較では、第2の方法のバンド数が第3の方法と同じであるならば、第2の方法の波長の切り替え機構系と、第3の方法の1軸方向へのスキャンの機構系についてどちらがシンプルで、信頼性が高いかという比較になる。第2の方法は、画像の位置ずれの問題は少ないが、第3の方法はスキャン方向の画素ずれと波長ずれが混在するという問題がある。また、既知の分光強度分布パターンを有する基準試料は、経時的に変化しないという保証はない。また、そのパターンで補正するが、パターン間は、内挿演算になるため、ずれ補正を完全になくすことは困難である。さらに、補正作業した後、次に補正するまでの間、光学系の分光画像はずれていくので、抜本的解決方法とはならない。一方、補正間隔を短くすれば、その間の計測はできないので、測定効率は低下する。
【0010】
したがって、本発明が解決しようとする技術的課題は、多くのバンド数を測定可能でかつ測定時間が短時間ですみ、また、各バンドの分光画像の位置ずれがない分光測定方法及び分光測定装置を提供することである。
【課題を解決するための手段】
【0011】
本発明は、上記目的を達成するため、以下のように構成した。
【0012】
本発明の第1態様によれば、基準カメラと、前記基準カメラと波長感度特性が異なる参照カメラを用いて被測定物を撮影して、それぞれのカメラにより基準画像データ及び参照画像データを作成し、
前記参照カメラにより作成された参照画像データを前記基準カメラの位置から撮影したように変換し画像中の被測定物上の任意の点を示す座標が前記基準カメラで撮影された基準画像データの被測定物上の同一点上の座標を示すような変換画像データを作成し、
前記基準カメラで撮影された前記基準画像データと前記変換画像データとの座標を共有化して、当該座標上における被測定物上の任意の点の分光データを作成することを特徴とする、分光測定方法を提供する。
【0013】
本発明の第2態様によれば、それぞれ波長感度特性が異なる複数の参照カメラを用いて被測定物を撮影して、それぞれのカメラにより参照画像データを作成し、
前記複数の参照カメラにより作成された複数の参照画像データを仮想の基準カメラの位置から撮影したように変換し、画像中の被測定物上の任意の点を示す座標が仮想の基準カメラの位置から撮影された仮想基準画像データの被測定物上の同一点上の座標を示すような変換画像データを作成し、
前記変換画像データとの座標を共有化して、当該座標上における被測定物上の任意の点の分光データを作成することを特徴とする分光測定方法を提供する。
【0014】
本発明の第3態様によれば、前記基準カメラ及び前記参照カメラは、一定時間ごとに連続して入力されるトリガ信号により画像の取得開始を行い、前記被測定物上の同一点上の座標を示す変換画像データは、同一時刻でのデータであり、前記当該座標上における被測定物上の任意の点の分光データは、先のトリガ時点での分光データであることを特徴とする、第1又は第2態様の分光測定方法を提供する。
【0015】
本発明の第4態様によれば、前記基準カメラと前記参照カメラを用いてそれぞれ被測定物を撮影する場合、前記被測定物表面に基準点を付した状態で撮影し、
前記変換画像データの作成において、基準画像データ及び参照画像データ中の前記基準点の座標を用いて、参照画像データから変換画像データの変換式を算出し、当該参照画像データの各座標を前記変換式に代入することによって、変換画像データを作成することを特徴とする、第1から第3態様のいずれか1つの分光測定方法を提供する。
【0016】
本発明の第5態様によれば、前記基準点は、投光装置から前記基準点を含む光を前記被測定物表面に投射することにより、被測定物表面に付されることを特徴とする、第4態様の分光測定方法を提供する。
【0017】
本発明の第6態様によれば、前記参照カメラは、前記基準カメラ及びそれぞれ波長感度特性が異なる複数のカメラで構成されていることを特徴とする、第1から第5態様のいずれか1つの分光測定方法を提供する。
【0018】
本発明の第7態様によれば、前記基準カメラ及び前記参照カメラは、特定の波長の光だけを透過させるバンドパスフィルタをそなえ、それぞれ異なる波長感度特性を有することを特徴とする、第1から第6態様のいずれか1つの分光測定方法を提供する。
【0019】
本発明の第8態様によれば、前記基準カメラおよび前記参照カメラは、XYZ表色系の等色関数に近似した波長感度特性を有することを特徴とする、第1から第7態様のいずれか1つの分光測定方法を提供する。
【0020】
本発明の第9態様によれば、被測定物を撮影して基準画像データを出力する基準カメラと、前記被測定物を撮影して参照画像データを出力する前記基準カメラと波長感度特性が異なる参照カメラと、
前記基準画像データ及び参照画像データを記憶する画像データ記憶部と、
前記画像データ記憶部に格納された前記参照画像データを前記基準カメラの位置から撮影したように変換し、前記参照画像データ中の被測定物上の任意の点を示す座標が前記基準カメラで撮影された基準画像データの被測定物上の同一点上の座標を示すような変換画像データを作成する変換画像作成部と、
前記基準カメラで撮影された前記基準画像データと前記変換画像データとの座標を共有化して、当該座標上における被測定物上の任意の点の分光データを作成するスペクトルデータ作成部とを備えることを特徴とする、分光測定装置を提供する。
【0021】
本発明の第10態様によれば、被測定物を撮影してそれぞれ参照画像データを作成する互いに波長感度特性が異なる複数の参照カメラと、
前記参照画像データをそれぞれ記憶する画像データ記憶部と、
前記複数の参照カメラにより作成された複数の参照画像データを仮想の基準カメラの位置から撮影したように変換し、画像中の被測定物上の任意の点を示す座標が仮想の基準カメラで撮影された仮想基準画像データの被測定物上の同一点上の座標を示すような変換画像データを作成する変換画像作成部と、
前記変換画像データとの座標を共有化して、当該座標上における被測定物上の任意の点の分光データを作成するスペクトルデータ作成部とを備えることを特徴とする、分光測定装置を提供する。
【発明の効果】
【0022】
本発明は、それぞれ波長感度特性の異なるエリアカメラにより、同一画像を計測した場合、異なるカメラ位置からくる画像の位置ずれを補正して、計測体の同一点からのデータは、同一付加グループ番号のメモリに格納できるように画像データをデジタル化して、変換するものである。各カメラにより撮影された画像データは、被測定物の一点における分光データを示すものであるため、各画像の座標ごとの輝度データを共有化することにより容易に分光スペクトル画像データを高速で測定することができる。
【0023】
また、同一時間であることを各カメラに伝達する手段としてトリガ信号を用いることにより、同一時間、同一場所の測定点の各カメラのデータを用いることができ、測定点の検査をより性格に行うことができる。
【発明を実施するための最良の形態】
【0024】
以下、本発明の実施形態に係る分光測定装置について、図面を参照しながら説明する。
【0025】
図1は、本発明の実施形態に係る分光測定装置の概略構成を示すブロック図である。分光測定装置1は、被測定物100を撮影し、画像データを出力可能な複数のカメラ11,12,13と、カメラ11,12,13から出力された画像データを処理演算する処理演算部20と、被測定物100を照射する光源30と、処理演算部20を操作する操作部40と、ディスプレイやプリンタなどの出力装置で構成される出力部50とを備えている。
【0026】
複数のカメラ11,12,13は、互いに分光特性が異なるカメラであり、赤外線から紫外線までのある特定の波長に光学特性を有するカメラを適宜選択して、必要とするバンド数の台数だけ使用することができる。また、複数のカメラ11,12,13は、互いの相対位置についての情報が既知であり、その情報は処理演算部20に記憶されている。複数のカメラ11,12,13は、参照カメラ又は基準カメラとして機能するものである。基準カメラは、後述する射影変換において、そのカメラ位置を基準とするカメラであり、参照カメラは、その撮影画像データが射影変換において、基準カメラのカメラ位置から撮影されたように射影変換されるカメラである。すなわち、両者の違いは射影変換処理時において、その基準となるか参照となるかの違いであり、構成上の実質的な相違はみられない。
【0027】
光源30は被測定物100に処理演算部20における画像処理に必要な基準点を照射するための光源であり、具体的には、液晶プロジェクタなど任意の画像を映写できる構成のものであることが好ましい。この映写画像の情報は、処理演算部20に記憶されている。操作部40は、測定者により操作されるキー入力スイッチ等から構成される。なお、処理演算部20は、実際には、パーソナルコンピュータを用いて構成することができ、該コンピュータに所定のプログラムを実行させることにより後述の各種処理を行なうようにすることができる。
【0028】
図2は、図1中の処理演算部20の要部の機能構成を示すブロック図である。カメラ11,12,13から出力された画像データは、受光素子毎にA/D変換部21にてデジタル信号に変換され射影変換部22へ入力される。射影変換部22には射影変換において演算上必要となるそれぞれのカメラの相対位置情報を記憶したカメラ位置情報メモリ26が接続されており、当該位置情報に基づいて後述のような処理によりそれぞれのカメラより撮影された画像データを射影変換する。
【0029】
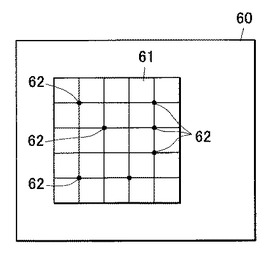
射影変換処理において、各画像の基準点は、光源30から被測定物100に照射された投影画像が用いられる。図3は、被測定物100の表面60に投影された投影画像の例を示す図である。投影画像62は、格子パターンであり、その縦線及び横線のクロス点62中の任意の点を基準点として用いることができる。ただし、各画像において、基準点は、投影画像中の同じ位置であることが必要である。また、基準点は少なくとも7つ必要であり、当該基準点の画像上の座標を用いて、射影変換が行われる。
【0030】
射影変換部22にて補正された分光画像は座標演算部23へ入力される。座標演算部23は、射影変換されたそれぞれのカメラ11,12,13からの画像情報について、画像上の同じ座標における輝度を統合させて、分光データとする。座標演算部23によって作成された分光データは、画像合成部24により、合成分光画像に変換されて、出力部50に出力される。以下、上記構成の分光測定装置の処理演算部20において行われる処理動作及び分光測定装置の用途例について詳述する。
【0031】
(実施例1)カメラ7台による可視光分光スペクトルエリア測定装置
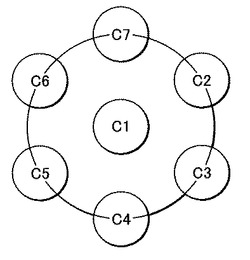
図4に示すように中央に1台とその周囲に6台のカメラを配置させ、それぞれC1からC7の番号を付ける。それぞれのカメラは、白黒デジタルビデオカメラモジュールXCL-V500(ソニー株式会社製)を7個使用している。それぞれを密な状態で設置するため、図4のような位置関係を持って配置される。このカメラは、毎秒60フレームのデジタル出力が可能である。
【0032】
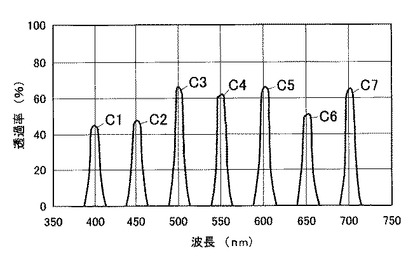
それぞれ7台のカメラには、測定面をピント合わせできる同じ種類のレンズが装着されており、レンズ前には、それぞれC1からC7に相当するフィルタが装着されている。フィルタは、バンドパスフィルタであり、その分光特性は、図5に示す。7個のカメラC1〜C7は、処理演算部20より発せられる同期信号により、一斉に被測定物100の撮影を開始する。そのデータは、上述のように処理演算部20に送信され、以下の処理がなされる。
【0033】
以下、処理演算部20において演算される画像データにおいて、L番目の測定データで、カメラKの画素(I,J)を、(I,J,K,L)と表し、その画像データは、Sijklと表す。データは、同期信号により全てのカメラにおいて同時に取得するので、以下は、lが同じデータで説明するため、Sijkl=Sijkとして、lの記載を省略する。
【0034】
まず、光源30から格子パターンを被測定物表面に照射し、それを7台のカメラで計測する。格子パターンは、400nmから700nmの範囲において十分に計測できるような広い波長の光を含む光源から照射される。それぞれのカメラC1〜C7は、図4において示したように、測定面からの位置が少しずつ異なるので、得られる画像データは異なる。
【0035】
図4の中心に設置してあるC1のカメラを基準カメラとして、図5に示す格子パターンの25個のクロス点62の画素を、コンピュータにより求める。今1番目のカメラ(C2)だけに注目する。カメラのクロス点62の番号h番目の画素(X,Y)を、(X1-h,Y1-h)とする。次に、2番目のカメラのクロス点12の番号h番目の画素(X,Y)を、(X2-h,Y2-h)とする。
【0036】
【数1】

【0037】
以下、これを、
[X1]=[P2][X2]と行列で表す。ここで、[P2]は、カメラC2の画像を基準カメラであるカメラC1の位置へ射影変換させるための定数行列である。
【0038】
上記式(1)より、
[P2]=([X1][X2]t)([X2][X2]t)-1
として、[P2]を求める。このようにして求められた[P2]を用いて、参照カメラC2の画像上の座標をカメラC1の画像上の座標に射影変換することができる。これがカメラC2の画像をカメラC1に合わせる一番簡単な変換である。上記式によれば、回転と直線的なゆがみだけが補正できる。
【0039】
なお、カメラC1とカメラC2との間の画像の補正において、各画像間で平行移動が必要な場合は、式(2)を用いて[P2]を算出する。また、非直線的な変換も必要な場合は、2次式のパラメータを導入して、式(3)を用いて[P2]を算出すればよい。
【0040】
【数2】
【0041】
【数3】
【0042】
3番目のカメラC3から7番目のカメラC7まで、上記と同様にして[P3]から[P7]を求める。被測定物のカメラKの(I,J)画素データは、最も簡単な変換例の場合、次の式(4)のようにして求められる。
【0043】
【数4】
【0044】
ここで、I,Jは、参照カメラC2〜C7で撮影された画像データの座標であるため、それぞれ、1からN、M(N,Mは、画像データのX軸、Y軸方向画素数を示す。)の自然数である。I',J'は、計算結果として、小数点も含むが、四捨五入により、自然数にする。
【0045】
このようにして求められたI',J'のメモリ番地M(I',J',K,1)に、SIJK1を格納する。
カメラC1は基準カメラであるので、カメラC1で撮影された画像データの各画素だけは、M(I,J,1,1)=SIJ11となる。これを、カメラ1から7に対して、それぞれの画素(I,J)のIが1からNまで、Jが1からMまで行う。
【0046】
同様に次の同期タイミングには、M(I',J',K,2)には、SIJK2が格納される。
【0047】
これにより、時間tのときの、測定対称位置の画素(I,J)に相当する7波長の分光データは、SIJ1t SIJ2t SIJ3t SIJ4t SIJ5t SIJ6t SIJ7tのようになる。
【0048】
本実施例によれば、コンピュータのメモリ上へのデータアクセスだけで、容易に時間tの時の測定対称位置の画素(I,J)に相当する7バンドの分光データを得ることができる。
【0049】
(実施例2)赤外カメラ3台と可視カメラ1台による測定対称面の水分量計測システム例
それぞれのカメラ配置は、図6である。中心に可視カメラC1を設置する。対称に3台の同種類の赤外カメラを設置して、各カメラは、被測定物表面にピント調整されている。
【0050】
通常、赤外カメラは、可視カメラに比べて画素数がなく、ぼやけた画像しか計測できない。また、水分は、赤外スペクトル領域に吸収がある。可視光線領域では透明な水でも、赤外カメラでは、その強い吸収により、水分量の計測、検知が可能である。工業計測ラインでは、製品の水検知が必要なことが多い。本実施例は、鋼板の製造のめっき鋼板上の表面処理膜の水分量を計測する分光測定装置の例を示す。
【0051】
赤外カメラは、通常高価であり、感度の点から単板式カメラが多い。しかし、単板式カメラの場合は、赤外スペクトル領域の固定した感度パターンしか計測できないので、測定対象に投光する光源の強度ふらつきや、あるいは赤外カメラのセンサの感度ふらつきにより、精度よく計測することが困難である。通常水分の計測を行う場合は、水の吸収スペクトルにおいて吸収の強い波長(以下では測定波長)と、吸収の少ないあるいは吸収のない波長で、測定波長よりも波長の長いところと、短いところを選び、以後、これらをそれぞれ参照波長1、参照波長2と呼ぶ(図11参照)。これらを用いて、ベースラインを求めて、水の吸収量だけを的確に求められるような演算(以降、3波長演算と呼ぶ)を行う。本実施例では、測定波長=2.8μm、参照波長1=2.3μm、参照波長2=3.9μmとした。
【0052】
赤外カメラC2には、測定波長に一致したバンドパスフィルタを、赤外カメラC3には、参照波長1に一致したバンドパスフィルタを、赤外カメラC4には、参照波長2に一致したバンドパスフィルタを設置する。なお、本実施例において用いた赤外カメラは、Electrophysics社製、型番PV320-LDである。
【0053】
4台のカメラから得られる画像のゆがみは、実施例1で示した処理方法と同様の方法で行う。ただ、異なるのは、可視カメラと赤外カメラで画素数が異なる。画素数は、通常可視カメラの方が多い。ここでは、中央に設置している可視カメラC1を基準カメラとし、その画素解像度に合ったメモリを用意しておく。赤外カメラは画素数が少ないので、赤外カメラに相当するメモリ番地M(I,J,K,L)には、データがないものが発生する。そのため、可視カメラの画素(I,J)で指定した箇所で、そこの赤外カメラデータが得られないことが発生するので、データの存在する最近傍点のメモリ番地データから内挿演算により、計算から値を求めて格納する。実際の測定したデータではないが、近似値を演算で求める。
【0054】
可視カメラC1は、赤外カメラより応答スピードが速い。そのため、プロセス計測において、ベルトコンベアなどで流れてきた測定対象体に関して、可視カメラから捉えたマーカに相当する形状を判別して、その位置を判断して、測定タイミングを生成する。その生成タイミングに同期して、可視カメラも含めた4台のカメラで撮影を行い、メモリにそのデータを格納する。その場合の画像のゆがみ補正は、実施例1で述べた方法と同じである。
【0055】
次に、赤外カメラC2〜C4(K=1,2,3)のM(I,J,1,t)、M(I,J,2,t)、M(I,J,3,t)のデータにおいて次の演算を行う。M(I,J,1,t)が測定波長のカメラであり、M(I,J,2,t)が参照波長1のカメラでM(I,J,3,t)が参照波長2のカメラである。
【0056】
まず、水分がないときのデータをあらかじめ測定しておき、それを、M(I,J,1,0)、M(I,J,2,0)、M(I,J,3,0)としておく。
【0057】
次に、
T(I,J,1,t) =M(I,J,1,t)/M(I,J,1,0)
T(I,J,2,t) =M(I,J,2,t)/M(I,J,2,0)
T(I,J,3,t) =M(I,J,3,t)/M(I,J,3,0)
を求めた後、
A(I,J,1,t) =−LOG10[T(I,J,1,t)]
A(I,J,2,t) =−LOG10[T(I,J,2,t)]
A(I,J,3,t) =−LOG10[T(I,J,3,t)]
の吸光度データを求め、次式の演算を行う。
S(I,J,t) =A(I,J,1,t) −{A(I,J,2,t) + A(I,J,3,t)}/2
【0058】
このS(I,J,t)が、測定対称位置の画素(I,J)に相当するところの水分量に比例する。これより水分量の画像データが得られる。この画像データは、水分量の増減に応じて、前段階の乾燥機の調整に用いられる。
【0059】
(実施例3)CCDカメラ複数台による三刺激値直読型色彩測定システム例
色を見分ける感度をあらわす人間の目に対応する分光感度は等色関数と呼ばれている。本実施例にかかる分光測定装置は、刺激値直読型の色彩測定機であり、等色関数に近似した応答感度をもつセンサx(λ)、y(λ)、z(λ)でサンプルを測定し、直接「三刺激値」と呼ばれるX,Y,Zの3つの値を測定する。
【0060】
ここで、上記X,Y,Zは、それぞれ以下の式(5)(6)(7)により求められる。
【0061】
【数5】
【0062】
【数6】
【0063】
【数7】
【0064】
また、Kは次の式(8)により求められる。ここでKは、明るさの規格化を示す定義式である。
【0065】
【数8】
【0066】
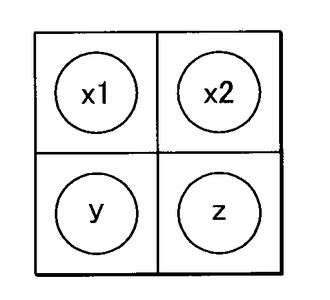
なお、人間の目に対応する分光感度(等色関数)は、図7に示すとおりである。本実施形態においては、等色関数に近似した分光応答度をもつx1、x2、y、zの4台のCCDカメラを用意し、この出力を三刺激値X,Y,Zとすることにより、色度座標を計算する。それぞれのカメラは、フィルタが設けられており、図8に示す分光特性を有する。また、x1、x2、y、zの4台のCCDカメラは、図9に示すとおり格子状に配置する。各カメラは処理演算部20から発せられる信号に同期して、同時に撮影を行い、メモリにそのデータを格納する。その場合の画像のゆがみ補正は、実施例1で述べた方法と同じである。
【0067】
図に示すとおりCCDカメラ配置の関係から、視野の位置がカメラごとに異なるため、図10に示すように、補正のためあらかじめ格子パターン66(キャリブレーションプレート)を配置してそれぞれのカメラで画像を撮影し、各カメラの視野における共通領域67を処理演算部20に登録する。そして、各カメラの撮影画像から共通領域67を抜き取り、これを合成し測定画像とする。
【0068】
本実施例にかかる刺激値直読型の色彩測定機は、次の効果を奏する。すなわち、等色関数に近似した分光応答度は、各応答感度に重なり合う部分が多いため、一般の3板式カメラ光学系で採用されているダイクロイックミラーによる入射光の分割ができない。また、ビームスプリッターにより入射光を分割すれば、分割後の光量が入射光の1/2あるいは1/4と小さくなり、ダイナミックレンジが低下するという問題がある。本実施例のように、独立したCCDカメラを使用することにより、直接入射光を受光できダイナミックレンジを向上させることができる。また、3板式カメラシステム組み立て時に行っているCCDセンサごとの画素位置調整が不要である。
【0069】
なお、本発明は上記実施形態に限定されるものではなく、その他種々の態様で実施可能である。例えば、分光測定装置に用いられるカメラの数は特に定められるものではなく、必要とするバンド数に応じて適数用いるようにすればよい。また、上記実施形態においては、各カメラで撮影された画像をいずれかのカメラ(基準カメラ)の位置から撮影されたように射影変換しているが、これを仮想的な基準カメラを想定し、当該撮影位置から撮影されたように射影変換することもできる。
【図面の簡単な説明】
【0070】
【図1】本発明の実施形態に係る分光測定装置の概略構成を示すブロック図である。
【図2】図1中の処理演算部の機能構成を示すブロック図である。
【図3】被測定物の表面に投影された格子パターンの投影画像の例を示す図である。
【図4】実施例1におけるカメラ配置を示す図である。
【図5】図4の各カメラの分光特性を示す図である。
【図6】実施例2におけるカメラ配置を示す図である。
【図7】人間の目に対応する分光感度を示す図である。
【図8】実施例3におけるカメラの分光特性を示す図である。
【図9】実施例3におけるカメラ配置を示す図である。
【図10】実施例3における共通領域の抽出処理の説明図である。
【図11】水の吸収スペクトルを示す図である。
【符号の説明】
【0071】
11、12、13 カメラ
20 処理演算部
21 A/D変換部
22 射影変換部
23 座標演算部
24 画像合成部
26 メモリ
30 光源
40 操作部
50 出力部
60 被測定物表面
62 投影画像
100 被測定物
【技術分野】
【0001】
本発明は、工業生産プロセスにおける分光分析による検査分野において画像検査を行う分光測定方法及び分光測定装置に関し、特に紫外、可視、赤外の各波長において分光分析による画像検査を行う分光測定方法及び分光測定装置に関する。
【背景技術】
【0002】
工業生産プロセスにおいて、製品の表面をカメラで撮影し、当該表面性状を検査する画像検査が広く行われている。当該画像検査は、波長特性が異なる複数の波長を用いて測定される分光分析により行われる場合がある。ここで、波長特性が異なる複数の画像を得るためには、従来以下のような方法が行われている。
【0003】
第1の方法は、例えば、特開2003−309858号公報(特許文献1)に開示されているように1台のカメラに複数(例えば、3つ)の固体撮像素子を有する複数板式カメラを用い、それぞれの固体撮像素子に入射する光路上に特定波長の光のみを透過させるバンドパスフィルタを設ける方法である。この方法は、1台のカメラを用い、当該カメラに搭載されている固体撮像素子の数のバンド数で分光画像を得ることができる。また、各撮像素子に入射される光は、共通する光軸によりカメラに入射することとなるため、各バンドの画像は、光軸のずれによる位置のずれがなく、各バンドの画像データの位置が一致した画像を得ることができる。よって、特定の画像上の測定点の座標を他の画像の測定点の画像と共有することができるため、分光データの活用が容易となる。
【0004】
第2の方法は、1台のカメラの前に波長特性の異なる複数のフィルタを備えたフィルタ切り替え機構があり、撮影時に特定波長の光のみを透過させるバンドパスフィルタを切り替えながら撮影を繰り返し行う方法である。この方法によれば、フィルタ切り替え機構に設けられたフィルタの数だけ分光データを得ることができ、多くのバンド数の分光データを得ることができる。
【0005】
第3の方法は、例えば、特開平10−300580号公報(特許文献2)に開示されている。この方法は、1台のカメラを用いるのであるが、その内蔵されているCCDに結像されるデータは、X軸方向が波長情報で、Y軸方向が測定物体の位置情報である。この場合、内蔵している回折格子の分光能力と、CCDのX軸方向のアレイ数で、分光データ数が決定するが、1回測定で得られるデータは、測定物体の線領域だけで面情報を得るためには、カメラ自体を線情報と垂直方向にスキャンさせて測定を行い続け、その測定回数分と移動距離で決定される分解能の画像データが得られるようにしたものである。
【特許文献1】特開2003−309858号公報
【特許文献2】特開平10−300580号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
しかし、第1の方法は、1台のカメラに搭載することができる固体撮像素子の数に限界があり、現状では例えば、RGBの3つ、多くても4波長までの分光データしか得られない。固体撮像素子をこれ以上に増やすと、光学系の構造が複雑になり、実用的ではないという問題がある。
【0007】
また、第2の方法は、バンド数の数だけ、撮影を繰り返し行う必要があるため、測定時間が非常に長くなり、得られるバンド数の画像は、それぞれ同じタイミングで撮影されたものではないという問題がある。したがって、動きのある被測定物の分析には不利である。また、カメラの光軸上でバンドパスフィルタを切り替えるための機械系部分が必須であるため、長期にわたる信頼性が低く、また、コストが高くなるという問題がある。
【0008】
また、第3の方法は、第1、第2の方法に比べれば、分光データ数は飛躍的に増える。数100から数1000の分光データの取得も可能である。しかし、物体面の高速測定という点では、1軸方向へのスキャンが必要なため第1の方法には及ばない。ただ、線方向のデータ取得はカメラレートであるので高速である。
【0009】
第2の方法との比較では、第2の方法のバンド数が第3の方法と同じであるならば、第2の方法の波長の切り替え機構系と、第3の方法の1軸方向へのスキャンの機構系についてどちらがシンプルで、信頼性が高いかという比較になる。第2の方法は、画像の位置ずれの問題は少ないが、第3の方法はスキャン方向の画素ずれと波長ずれが混在するという問題がある。また、既知の分光強度分布パターンを有する基準試料は、経時的に変化しないという保証はない。また、そのパターンで補正するが、パターン間は、内挿演算になるため、ずれ補正を完全になくすことは困難である。さらに、補正作業した後、次に補正するまでの間、光学系の分光画像はずれていくので、抜本的解決方法とはならない。一方、補正間隔を短くすれば、その間の計測はできないので、測定効率は低下する。
【0010】
したがって、本発明が解決しようとする技術的課題は、多くのバンド数を測定可能でかつ測定時間が短時間ですみ、また、各バンドの分光画像の位置ずれがない分光測定方法及び分光測定装置を提供することである。
【課題を解決するための手段】
【0011】
本発明は、上記目的を達成するため、以下のように構成した。
【0012】
本発明の第1態様によれば、基準カメラと、前記基準カメラと波長感度特性が異なる参照カメラを用いて被測定物を撮影して、それぞれのカメラにより基準画像データ及び参照画像データを作成し、
前記参照カメラにより作成された参照画像データを前記基準カメラの位置から撮影したように変換し画像中の被測定物上の任意の点を示す座標が前記基準カメラで撮影された基準画像データの被測定物上の同一点上の座標を示すような変換画像データを作成し、
前記基準カメラで撮影された前記基準画像データと前記変換画像データとの座標を共有化して、当該座標上における被測定物上の任意の点の分光データを作成することを特徴とする、分光測定方法を提供する。
【0013】
本発明の第2態様によれば、それぞれ波長感度特性が異なる複数の参照カメラを用いて被測定物を撮影して、それぞれのカメラにより参照画像データを作成し、
前記複数の参照カメラにより作成された複数の参照画像データを仮想の基準カメラの位置から撮影したように変換し、画像中の被測定物上の任意の点を示す座標が仮想の基準カメラの位置から撮影された仮想基準画像データの被測定物上の同一点上の座標を示すような変換画像データを作成し、
前記変換画像データとの座標を共有化して、当該座標上における被測定物上の任意の点の分光データを作成することを特徴とする分光測定方法を提供する。
【0014】
本発明の第3態様によれば、前記基準カメラ及び前記参照カメラは、一定時間ごとに連続して入力されるトリガ信号により画像の取得開始を行い、前記被測定物上の同一点上の座標を示す変換画像データは、同一時刻でのデータであり、前記当該座標上における被測定物上の任意の点の分光データは、先のトリガ時点での分光データであることを特徴とする、第1又は第2態様の分光測定方法を提供する。
【0015】
本発明の第4態様によれば、前記基準カメラと前記参照カメラを用いてそれぞれ被測定物を撮影する場合、前記被測定物表面に基準点を付した状態で撮影し、
前記変換画像データの作成において、基準画像データ及び参照画像データ中の前記基準点の座標を用いて、参照画像データから変換画像データの変換式を算出し、当該参照画像データの各座標を前記変換式に代入することによって、変換画像データを作成することを特徴とする、第1から第3態様のいずれか1つの分光測定方法を提供する。
【0016】
本発明の第5態様によれば、前記基準点は、投光装置から前記基準点を含む光を前記被測定物表面に投射することにより、被測定物表面に付されることを特徴とする、第4態様の分光測定方法を提供する。
【0017】
本発明の第6態様によれば、前記参照カメラは、前記基準カメラ及びそれぞれ波長感度特性が異なる複数のカメラで構成されていることを特徴とする、第1から第5態様のいずれか1つの分光測定方法を提供する。
【0018】
本発明の第7態様によれば、前記基準カメラ及び前記参照カメラは、特定の波長の光だけを透過させるバンドパスフィルタをそなえ、それぞれ異なる波長感度特性を有することを特徴とする、第1から第6態様のいずれか1つの分光測定方法を提供する。
【0019】
本発明の第8態様によれば、前記基準カメラおよび前記参照カメラは、XYZ表色系の等色関数に近似した波長感度特性を有することを特徴とする、第1から第7態様のいずれか1つの分光測定方法を提供する。
【0020】
本発明の第9態様によれば、被測定物を撮影して基準画像データを出力する基準カメラと、前記被測定物を撮影して参照画像データを出力する前記基準カメラと波長感度特性が異なる参照カメラと、
前記基準画像データ及び参照画像データを記憶する画像データ記憶部と、
前記画像データ記憶部に格納された前記参照画像データを前記基準カメラの位置から撮影したように変換し、前記参照画像データ中の被測定物上の任意の点を示す座標が前記基準カメラで撮影された基準画像データの被測定物上の同一点上の座標を示すような変換画像データを作成する変換画像作成部と、
前記基準カメラで撮影された前記基準画像データと前記変換画像データとの座標を共有化して、当該座標上における被測定物上の任意の点の分光データを作成するスペクトルデータ作成部とを備えることを特徴とする、分光測定装置を提供する。
【0021】
本発明の第10態様によれば、被測定物を撮影してそれぞれ参照画像データを作成する互いに波長感度特性が異なる複数の参照カメラと、
前記参照画像データをそれぞれ記憶する画像データ記憶部と、
前記複数の参照カメラにより作成された複数の参照画像データを仮想の基準カメラの位置から撮影したように変換し、画像中の被測定物上の任意の点を示す座標が仮想の基準カメラで撮影された仮想基準画像データの被測定物上の同一点上の座標を示すような変換画像データを作成する変換画像作成部と、
前記変換画像データとの座標を共有化して、当該座標上における被測定物上の任意の点の分光データを作成するスペクトルデータ作成部とを備えることを特徴とする、分光測定装置を提供する。
【発明の効果】
【0022】
本発明は、それぞれ波長感度特性の異なるエリアカメラにより、同一画像を計測した場合、異なるカメラ位置からくる画像の位置ずれを補正して、計測体の同一点からのデータは、同一付加グループ番号のメモリに格納できるように画像データをデジタル化して、変換するものである。各カメラにより撮影された画像データは、被測定物の一点における分光データを示すものであるため、各画像の座標ごとの輝度データを共有化することにより容易に分光スペクトル画像データを高速で測定することができる。
【0023】
また、同一時間であることを各カメラに伝達する手段としてトリガ信号を用いることにより、同一時間、同一場所の測定点の各カメラのデータを用いることができ、測定点の検査をより性格に行うことができる。
【発明を実施するための最良の形態】
【0024】
以下、本発明の実施形態に係る分光測定装置について、図面を参照しながら説明する。
【0025】
図1は、本発明の実施形態に係る分光測定装置の概略構成を示すブロック図である。分光測定装置1は、被測定物100を撮影し、画像データを出力可能な複数のカメラ11,12,13と、カメラ11,12,13から出力された画像データを処理演算する処理演算部20と、被測定物100を照射する光源30と、処理演算部20を操作する操作部40と、ディスプレイやプリンタなどの出力装置で構成される出力部50とを備えている。
【0026】
複数のカメラ11,12,13は、互いに分光特性が異なるカメラであり、赤外線から紫外線までのある特定の波長に光学特性を有するカメラを適宜選択して、必要とするバンド数の台数だけ使用することができる。また、複数のカメラ11,12,13は、互いの相対位置についての情報が既知であり、その情報は処理演算部20に記憶されている。複数のカメラ11,12,13は、参照カメラ又は基準カメラとして機能するものである。基準カメラは、後述する射影変換において、そのカメラ位置を基準とするカメラであり、参照カメラは、その撮影画像データが射影変換において、基準カメラのカメラ位置から撮影されたように射影変換されるカメラである。すなわち、両者の違いは射影変換処理時において、その基準となるか参照となるかの違いであり、構成上の実質的な相違はみられない。
【0027】
光源30は被測定物100に処理演算部20における画像処理に必要な基準点を照射するための光源であり、具体的には、液晶プロジェクタなど任意の画像を映写できる構成のものであることが好ましい。この映写画像の情報は、処理演算部20に記憶されている。操作部40は、測定者により操作されるキー入力スイッチ等から構成される。なお、処理演算部20は、実際には、パーソナルコンピュータを用いて構成することができ、該コンピュータに所定のプログラムを実行させることにより後述の各種処理を行なうようにすることができる。
【0028】
図2は、図1中の処理演算部20の要部の機能構成を示すブロック図である。カメラ11,12,13から出力された画像データは、受光素子毎にA/D変換部21にてデジタル信号に変換され射影変換部22へ入力される。射影変換部22には射影変換において演算上必要となるそれぞれのカメラの相対位置情報を記憶したカメラ位置情報メモリ26が接続されており、当該位置情報に基づいて後述のような処理によりそれぞれのカメラより撮影された画像データを射影変換する。
【0029】
射影変換処理において、各画像の基準点は、光源30から被測定物100に照射された投影画像が用いられる。図3は、被測定物100の表面60に投影された投影画像の例を示す図である。投影画像62は、格子パターンであり、その縦線及び横線のクロス点62中の任意の点を基準点として用いることができる。ただし、各画像において、基準点は、投影画像中の同じ位置であることが必要である。また、基準点は少なくとも7つ必要であり、当該基準点の画像上の座標を用いて、射影変換が行われる。
【0030】
射影変換部22にて補正された分光画像は座標演算部23へ入力される。座標演算部23は、射影変換されたそれぞれのカメラ11,12,13からの画像情報について、画像上の同じ座標における輝度を統合させて、分光データとする。座標演算部23によって作成された分光データは、画像合成部24により、合成分光画像に変換されて、出力部50に出力される。以下、上記構成の分光測定装置の処理演算部20において行われる処理動作及び分光測定装置の用途例について詳述する。
【0031】
(実施例1)カメラ7台による可視光分光スペクトルエリア測定装置
図4に示すように中央に1台とその周囲に6台のカメラを配置させ、それぞれC1からC7の番号を付ける。それぞれのカメラは、白黒デジタルビデオカメラモジュールXCL-V500(ソニー株式会社製)を7個使用している。それぞれを密な状態で設置するため、図4のような位置関係を持って配置される。このカメラは、毎秒60フレームのデジタル出力が可能である。
【0032】
それぞれ7台のカメラには、測定面をピント合わせできる同じ種類のレンズが装着されており、レンズ前には、それぞれC1からC7に相当するフィルタが装着されている。フィルタは、バンドパスフィルタであり、その分光特性は、図5に示す。7個のカメラC1〜C7は、処理演算部20より発せられる同期信号により、一斉に被測定物100の撮影を開始する。そのデータは、上述のように処理演算部20に送信され、以下の処理がなされる。
【0033】
以下、処理演算部20において演算される画像データにおいて、L番目の測定データで、カメラKの画素(I,J)を、(I,J,K,L)と表し、その画像データは、Sijklと表す。データは、同期信号により全てのカメラにおいて同時に取得するので、以下は、lが同じデータで説明するため、Sijkl=Sijkとして、lの記載を省略する。
【0034】
まず、光源30から格子パターンを被測定物表面に照射し、それを7台のカメラで計測する。格子パターンは、400nmから700nmの範囲において十分に計測できるような広い波長の光を含む光源から照射される。それぞれのカメラC1〜C7は、図4において示したように、測定面からの位置が少しずつ異なるので、得られる画像データは異なる。
【0035】
図4の中心に設置してあるC1のカメラを基準カメラとして、図5に示す格子パターンの25個のクロス点62の画素を、コンピュータにより求める。今1番目のカメラ(C2)だけに注目する。カメラのクロス点62の番号h番目の画素(X,Y)を、(X1-h,Y1-h)とする。次に、2番目のカメラのクロス点12の番号h番目の画素(X,Y)を、(X2-h,Y2-h)とする。
【0036】
【数1】
【0037】
以下、これを、
[X1]=[P2][X2]と行列で表す。ここで、[P2]は、カメラC2の画像を基準カメラであるカメラC1の位置へ射影変換させるための定数行列である。
【0038】
上記式(1)より、
[P2]=([X1][X2]t)([X2][X2]t)-1
として、[P2]を求める。このようにして求められた[P2]を用いて、参照カメラC2の画像上の座標をカメラC1の画像上の座標に射影変換することができる。これがカメラC2の画像をカメラC1に合わせる一番簡単な変換である。上記式によれば、回転と直線的なゆがみだけが補正できる。
【0039】
なお、カメラC1とカメラC2との間の画像の補正において、各画像間で平行移動が必要な場合は、式(2)を用いて[P2]を算出する。また、非直線的な変換も必要な場合は、2次式のパラメータを導入して、式(3)を用いて[P2]を算出すればよい。
【0040】
【数2】
【0041】
【数3】
【0042】
3番目のカメラC3から7番目のカメラC7まで、上記と同様にして[P3]から[P7]を求める。被測定物のカメラKの(I,J)画素データは、最も簡単な変換例の場合、次の式(4)のようにして求められる。
【0043】
【数4】
【0044】
ここで、I,Jは、参照カメラC2〜C7で撮影された画像データの座標であるため、それぞれ、1からN、M(N,Mは、画像データのX軸、Y軸方向画素数を示す。)の自然数である。I',J'は、計算結果として、小数点も含むが、四捨五入により、自然数にする。
【0045】
このようにして求められたI',J'のメモリ番地M(I',J',K,1)に、SIJK1を格納する。
カメラC1は基準カメラであるので、カメラC1で撮影された画像データの各画素だけは、M(I,J,1,1)=SIJ11となる。これを、カメラ1から7に対して、それぞれの画素(I,J)のIが1からNまで、Jが1からMまで行う。
【0046】
同様に次の同期タイミングには、M(I',J',K,2)には、SIJK2が格納される。
【0047】
これにより、時間tのときの、測定対称位置の画素(I,J)に相当する7波長の分光データは、SIJ1t SIJ2t SIJ3t SIJ4t SIJ5t SIJ6t SIJ7tのようになる。
【0048】
本実施例によれば、コンピュータのメモリ上へのデータアクセスだけで、容易に時間tの時の測定対称位置の画素(I,J)に相当する7バンドの分光データを得ることができる。
【0049】
(実施例2)赤外カメラ3台と可視カメラ1台による測定対称面の水分量計測システム例
それぞれのカメラ配置は、図6である。中心に可視カメラC1を設置する。対称に3台の同種類の赤外カメラを設置して、各カメラは、被測定物表面にピント調整されている。
【0050】
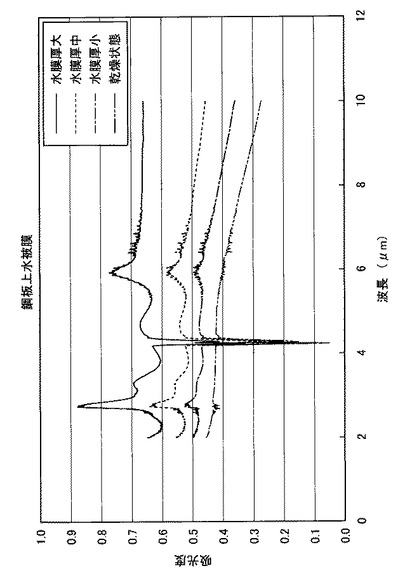
通常、赤外カメラは、可視カメラに比べて画素数がなく、ぼやけた画像しか計測できない。また、水分は、赤外スペクトル領域に吸収がある。可視光線領域では透明な水でも、赤外カメラでは、その強い吸収により、水分量の計測、検知が可能である。工業計測ラインでは、製品の水検知が必要なことが多い。本実施例は、鋼板の製造のめっき鋼板上の表面処理膜の水分量を計測する分光測定装置の例を示す。
【0051】
赤外カメラは、通常高価であり、感度の点から単板式カメラが多い。しかし、単板式カメラの場合は、赤外スペクトル領域の固定した感度パターンしか計測できないので、測定対象に投光する光源の強度ふらつきや、あるいは赤外カメラのセンサの感度ふらつきにより、精度よく計測することが困難である。通常水分の計測を行う場合は、水の吸収スペクトルにおいて吸収の強い波長(以下では測定波長)と、吸収の少ないあるいは吸収のない波長で、測定波長よりも波長の長いところと、短いところを選び、以後、これらをそれぞれ参照波長1、参照波長2と呼ぶ(図11参照)。これらを用いて、ベースラインを求めて、水の吸収量だけを的確に求められるような演算(以降、3波長演算と呼ぶ)を行う。本実施例では、測定波長=2.8μm、参照波長1=2.3μm、参照波長2=3.9μmとした。
【0052】
赤外カメラC2には、測定波長に一致したバンドパスフィルタを、赤外カメラC3には、参照波長1に一致したバンドパスフィルタを、赤外カメラC4には、参照波長2に一致したバンドパスフィルタを設置する。なお、本実施例において用いた赤外カメラは、Electrophysics社製、型番PV320-LDである。
【0053】
4台のカメラから得られる画像のゆがみは、実施例1で示した処理方法と同様の方法で行う。ただ、異なるのは、可視カメラと赤外カメラで画素数が異なる。画素数は、通常可視カメラの方が多い。ここでは、中央に設置している可視カメラC1を基準カメラとし、その画素解像度に合ったメモリを用意しておく。赤外カメラは画素数が少ないので、赤外カメラに相当するメモリ番地M(I,J,K,L)には、データがないものが発生する。そのため、可視カメラの画素(I,J)で指定した箇所で、そこの赤外カメラデータが得られないことが発生するので、データの存在する最近傍点のメモリ番地データから内挿演算により、計算から値を求めて格納する。実際の測定したデータではないが、近似値を演算で求める。
【0054】
可視カメラC1は、赤外カメラより応答スピードが速い。そのため、プロセス計測において、ベルトコンベアなどで流れてきた測定対象体に関して、可視カメラから捉えたマーカに相当する形状を判別して、その位置を判断して、測定タイミングを生成する。その生成タイミングに同期して、可視カメラも含めた4台のカメラで撮影を行い、メモリにそのデータを格納する。その場合の画像のゆがみ補正は、実施例1で述べた方法と同じである。
【0055】
次に、赤外カメラC2〜C4(K=1,2,3)のM(I,J,1,t)、M(I,J,2,t)、M(I,J,3,t)のデータにおいて次の演算を行う。M(I,J,1,t)が測定波長のカメラであり、M(I,J,2,t)が参照波長1のカメラでM(I,J,3,t)が参照波長2のカメラである。
【0056】
まず、水分がないときのデータをあらかじめ測定しておき、それを、M(I,J,1,0)、M(I,J,2,0)、M(I,J,3,0)としておく。
【0057】
次に、
T(I,J,1,t) =M(I,J,1,t)/M(I,J,1,0)
T(I,J,2,t) =M(I,J,2,t)/M(I,J,2,0)
T(I,J,3,t) =M(I,J,3,t)/M(I,J,3,0)
を求めた後、
A(I,J,1,t) =−LOG10[T(I,J,1,t)]
A(I,J,2,t) =−LOG10[T(I,J,2,t)]
A(I,J,3,t) =−LOG10[T(I,J,3,t)]
の吸光度データを求め、次式の演算を行う。
S(I,J,t) =A(I,J,1,t) −{A(I,J,2,t) + A(I,J,3,t)}/2
【0058】
このS(I,J,t)が、測定対称位置の画素(I,J)に相当するところの水分量に比例する。これより水分量の画像データが得られる。この画像データは、水分量の増減に応じて、前段階の乾燥機の調整に用いられる。
【0059】
(実施例3)CCDカメラ複数台による三刺激値直読型色彩測定システム例
色を見分ける感度をあらわす人間の目に対応する分光感度は等色関数と呼ばれている。本実施例にかかる分光測定装置は、刺激値直読型の色彩測定機であり、等色関数に近似した応答感度をもつセンサx(λ)、y(λ)、z(λ)でサンプルを測定し、直接「三刺激値」と呼ばれるX,Y,Zの3つの値を測定する。
【0060】
ここで、上記X,Y,Zは、それぞれ以下の式(5)(6)(7)により求められる。
【0061】
【数5】
【0062】
【数6】
【0063】
【数7】
【0064】
また、Kは次の式(8)により求められる。ここでKは、明るさの規格化を示す定義式である。
【0065】
【数8】
【0066】
なお、人間の目に対応する分光感度(等色関数)は、図7に示すとおりである。本実施形態においては、等色関数に近似した分光応答度をもつx1、x2、y、zの4台のCCDカメラを用意し、この出力を三刺激値X,Y,Zとすることにより、色度座標を計算する。それぞれのカメラは、フィルタが設けられており、図8に示す分光特性を有する。また、x1、x2、y、zの4台のCCDカメラは、図9に示すとおり格子状に配置する。各カメラは処理演算部20から発せられる信号に同期して、同時に撮影を行い、メモリにそのデータを格納する。その場合の画像のゆがみ補正は、実施例1で述べた方法と同じである。
【0067】
図に示すとおりCCDカメラ配置の関係から、視野の位置がカメラごとに異なるため、図10に示すように、補正のためあらかじめ格子パターン66(キャリブレーションプレート)を配置してそれぞれのカメラで画像を撮影し、各カメラの視野における共通領域67を処理演算部20に登録する。そして、各カメラの撮影画像から共通領域67を抜き取り、これを合成し測定画像とする。
【0068】
本実施例にかかる刺激値直読型の色彩測定機は、次の効果を奏する。すなわち、等色関数に近似した分光応答度は、各応答感度に重なり合う部分が多いため、一般の3板式カメラ光学系で採用されているダイクロイックミラーによる入射光の分割ができない。また、ビームスプリッターにより入射光を分割すれば、分割後の光量が入射光の1/2あるいは1/4と小さくなり、ダイナミックレンジが低下するという問題がある。本実施例のように、独立したCCDカメラを使用することにより、直接入射光を受光できダイナミックレンジを向上させることができる。また、3板式カメラシステム組み立て時に行っているCCDセンサごとの画素位置調整が不要である。
【0069】
なお、本発明は上記実施形態に限定されるものではなく、その他種々の態様で実施可能である。例えば、分光測定装置に用いられるカメラの数は特に定められるものではなく、必要とするバンド数に応じて適数用いるようにすればよい。また、上記実施形態においては、各カメラで撮影された画像をいずれかのカメラ(基準カメラ)の位置から撮影されたように射影変換しているが、これを仮想的な基準カメラを想定し、当該撮影位置から撮影されたように射影変換することもできる。
【図面の簡単な説明】
【0070】
【図1】本発明の実施形態に係る分光測定装置の概略構成を示すブロック図である。
【図2】図1中の処理演算部の機能構成を示すブロック図である。
【図3】被測定物の表面に投影された格子パターンの投影画像の例を示す図である。
【図4】実施例1におけるカメラ配置を示す図である。
【図5】図4の各カメラの分光特性を示す図である。
【図6】実施例2におけるカメラ配置を示す図である。
【図7】人間の目に対応する分光感度を示す図である。
【図8】実施例3におけるカメラの分光特性を示す図である。
【図9】実施例3におけるカメラ配置を示す図である。
【図10】実施例3における共通領域の抽出処理の説明図である。
【図11】水の吸収スペクトルを示す図である。
【符号の説明】
【0071】
11、12、13 カメラ
20 処理演算部
21 A/D変換部
22 射影変換部
23 座標演算部
24 画像合成部
26 メモリ
30 光源
40 操作部
50 出力部
60 被測定物表面
62 投影画像
100 被測定物
【特許請求の範囲】
【請求項1】
基準カメラと、前記基準カメラと波長感度特性が異なる参照カメラを用いて被測定物を撮影して、それぞれのカメラにより基準画像データ及び参照画像データを作成し、
前記参照カメラにより作成された参照画像データを前記基準カメラの位置から撮影したように変換し画像中の被測定物上の任意の点を示す座標が前記基準カメラで撮影された基準画像データの被測定物上の同一点上の座標を示すような変換画像データを作成し、
前記基準カメラで撮影された前記基準画像データと前記変換画像データとの座標を共有化して、当該座標上における被測定物上の任意の点の分光データを作成することを特徴とする、分光測定方法。
【請求項2】
それぞれ波長感度特性が異なる複数の参照カメラを用いて被測定物を撮影して、それぞれのカメラにより参照画像データを作成し、
前記複数の参照カメラにより作成された複数の参照画像データを仮想の基準カメラの位置から撮影したように変換し、画像中の被測定物上の任意の点を示す座標が仮想の基準カメラの位置から撮影された仮想基準画像データの被測定物上の同一点上の座標を示すような変換画像データを作成し、
前記変換画像データとの座標を共有化して、当該座標上における被測定物上の任意の点の分光データを作成することを特徴とする、分光測定方法。
【請求項3】
前記基準カメラ及び前記参照カメラは、一定時間ごとに連続して入力されるトリガ信号により画像の取得開始を行い、前記被測定物上の同一点上の座標を示す変換画像データは、同一時刻でのデータであり、前記当該座標上における被測定物上の任意の点の分光データは、先のトリガ時点での分光データであることを特徴とする、請求項1又は2に記載の分光測定方法。
【請求項4】
前記基準カメラと前記参照カメラを用いてそれぞれ被測定物を撮影する場合、前記被測定物表面に基準点を付した状態で撮影し、
前記変換画像データの作成において、基準画像データ及び参照画像データ中の前記基準点の座標を用いて、参照画像データから変換画像データの変換式を算出し、当該参照画像データの各座標を前記変換式に代入することによって、変換画像データを作成することを特徴とする、請求項1から3のいずれか1つに記載の分光測定方法。
【請求項5】
前記基準点は、投光装置から前記基準点を含む光を前記被測定物表面に投射することにより、被測定物表面に付されることを特徴とする、請求項4に記載の分光測定方法。
【請求項6】
前記参照カメラは、前記基準カメラ及びそれぞれ波長感度特性が異なる複数のカメラで構成されていることを特徴とする、請求項1から5のいずれか1つに記載の分光測定方法。
【請求項7】
前記基準カメラ及び前記参照カメラは、特定の波長の光だけを透過させるバンドパスフィルタをそなえ、それぞれ異なる波長感度特性を有することを特徴とする、請求項1から6のいずれか1つに記載の分光測定方法。
【請求項8】
前記基準カメラおよび前記参照カメラは、XYZ表色系の等色関数に近似した波長感度特性を有することを特徴とする、請求項1から7のいずれか1つに記載の分光測定方法。
【請求項9】
被測定物を撮影して基準画像データを出力する基準カメラと、前記被測定物を撮影して参照画像データを出力する前記基準カメラと波長感度特性が異なる参照カメラと、
前記基準画像データ及び参照画像データを記憶する画像データ記憶部と、
前記画像データ記憶部に格納された前記参照画像データを前記基準カメラの位置から撮影したように変換し、前記参照画像データ中の被測定物上の任意の点を示す座標が前記基準カメラで撮影された基準画像データの被測定物上の同一点上の座標を示すような変換画像データを作成する変換画像作成部と、
前記基準カメラで撮影された前記基準画像データと前記変換画像データとの座標を共有化して、当該座標上における被測定物上の任意の点の分光データを作成するスペクトルデータ作成部とを備えることを特徴とする、分光測定装置。
【請求項10】
被測定物を撮影してそれぞれ参照画像データを作成する互いに波長感度特性が異なる複数の参照カメラと、
前記参照画像データをそれぞれ記憶する画像データ記憶部と、
前記複数の参照カメラにより作成された複数の参照画像データを仮想の基準カメラの位置から撮影したように変換し、画像中の被測定物上の任意の点を示す座標が仮想の基準カメラで撮影された仮想基準画像データの被測定物上の同一点上の座標を示すような変換画像データを作成する変換画像作成部と、
前記変換画像データとの座標を共有化して、当該座標上における被測定物上の任意の点の分光データを作成するスペクトルデータ作成部とを備えることを特徴とする、分光測定装置。
【請求項1】
基準カメラと、前記基準カメラと波長感度特性が異なる参照カメラを用いて被測定物を撮影して、それぞれのカメラにより基準画像データ及び参照画像データを作成し、
前記参照カメラにより作成された参照画像データを前記基準カメラの位置から撮影したように変換し画像中の被測定物上の任意の点を示す座標が前記基準カメラで撮影された基準画像データの被測定物上の同一点上の座標を示すような変換画像データを作成し、
前記基準カメラで撮影された前記基準画像データと前記変換画像データとの座標を共有化して、当該座標上における被測定物上の任意の点の分光データを作成することを特徴とする、分光測定方法。
【請求項2】
それぞれ波長感度特性が異なる複数の参照カメラを用いて被測定物を撮影して、それぞれのカメラにより参照画像データを作成し、
前記複数の参照カメラにより作成された複数の参照画像データを仮想の基準カメラの位置から撮影したように変換し、画像中の被測定物上の任意の点を示す座標が仮想の基準カメラの位置から撮影された仮想基準画像データの被測定物上の同一点上の座標を示すような変換画像データを作成し、
前記変換画像データとの座標を共有化して、当該座標上における被測定物上の任意の点の分光データを作成することを特徴とする、分光測定方法。
【請求項3】
前記基準カメラ及び前記参照カメラは、一定時間ごとに連続して入力されるトリガ信号により画像の取得開始を行い、前記被測定物上の同一点上の座標を示す変換画像データは、同一時刻でのデータであり、前記当該座標上における被測定物上の任意の点の分光データは、先のトリガ時点での分光データであることを特徴とする、請求項1又は2に記載の分光測定方法。
【請求項4】
前記基準カメラと前記参照カメラを用いてそれぞれ被測定物を撮影する場合、前記被測定物表面に基準点を付した状態で撮影し、
前記変換画像データの作成において、基準画像データ及び参照画像データ中の前記基準点の座標を用いて、参照画像データから変換画像データの変換式を算出し、当該参照画像データの各座標を前記変換式に代入することによって、変換画像データを作成することを特徴とする、請求項1から3のいずれか1つに記載の分光測定方法。
【請求項5】
前記基準点は、投光装置から前記基準点を含む光を前記被測定物表面に投射することにより、被測定物表面に付されることを特徴とする、請求項4に記載の分光測定方法。
【請求項6】
前記参照カメラは、前記基準カメラ及びそれぞれ波長感度特性が異なる複数のカメラで構成されていることを特徴とする、請求項1から5のいずれか1つに記載の分光測定方法。
【請求項7】
前記基準カメラ及び前記参照カメラは、特定の波長の光だけを透過させるバンドパスフィルタをそなえ、それぞれ異なる波長感度特性を有することを特徴とする、請求項1から6のいずれか1つに記載の分光測定方法。
【請求項8】
前記基準カメラおよび前記参照カメラは、XYZ表色系の等色関数に近似した波長感度特性を有することを特徴とする、請求項1から7のいずれか1つに記載の分光測定方法。
【請求項9】
被測定物を撮影して基準画像データを出力する基準カメラと、前記被測定物を撮影して参照画像データを出力する前記基準カメラと波長感度特性が異なる参照カメラと、
前記基準画像データ及び参照画像データを記憶する画像データ記憶部と、
前記画像データ記憶部に格納された前記参照画像データを前記基準カメラの位置から撮影したように変換し、前記参照画像データ中の被測定物上の任意の点を示す座標が前記基準カメラで撮影された基準画像データの被測定物上の同一点上の座標を示すような変換画像データを作成する変換画像作成部と、
前記基準カメラで撮影された前記基準画像データと前記変換画像データとの座標を共有化して、当該座標上における被測定物上の任意の点の分光データを作成するスペクトルデータ作成部とを備えることを特徴とする、分光測定装置。
【請求項10】
被測定物を撮影してそれぞれ参照画像データを作成する互いに波長感度特性が異なる複数の参照カメラと、
前記参照画像データをそれぞれ記憶する画像データ記憶部と、
前記複数の参照カメラにより作成された複数の参照画像データを仮想の基準カメラの位置から撮影したように変換し、画像中の被測定物上の任意の点を示す座標が仮想の基準カメラで撮影された仮想基準画像データの被測定物上の同一点上の座標を示すような変換画像データを作成する変換画像作成部と、
前記変換画像データとの座標を共有化して、当該座標上における被測定物上の任意の点の分光データを作成するスペクトルデータ作成部とを備えることを特徴とする、分光測定装置。
【図1】


【図2】

【図3】
【図4】
【図5】
【図6】

【図7】

【図8】

【図9】
【図10】

【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2007−147507(P2007−147507A)
【公開日】平成19年6月14日(2007.6.14)
【国際特許分類】
【出願番号】特願2005−344200(P2005−344200)
【出願日】平成17年11月29日(2005.11.29)
【出願人】(000001096)倉敷紡績株式会社 (296)
【Fターム(参考)】
【公開日】平成19年6月14日(2007.6.14)
【国際特許分類】
【出願日】平成17年11月29日(2005.11.29)
【出願人】(000001096)倉敷紡績株式会社 (296)
【Fターム(参考)】
[ Back to top ]