
巻糸装置

【課題】簡易な構成で、各糸条部材に均等にテンションを付与し続けることができる巻糸装置を提供する。
【解決手段】2本の糸条L1,L2を個別に巻き取る巻糸装置は、各糸条L1,L2にそれぞれテンションを付与する複数のローラからなるローラ群10と、並列的に配置され、ローラ群10全体に引張力を作用させる複数のバネ部材21、22を有する引張装置20と、各糸条L1,L2の異常を検知する異常検知センサ91とを有する張力付与装置1を備える。この巻糸装置は、異常検知センサ91により糸条L1,L2の異常が検知された場合、少なくとも一つのバネ部材21又は22の引張力を喪失させる。
【解決手段】2本の糸条L1,L2を個別に巻き取る巻糸装置は、各糸条L1,L2にそれぞれテンションを付与する複数のローラからなるローラ群10と、並列的に配置され、ローラ群10全体に引張力を作用させる複数のバネ部材21、22を有する引張装置20と、各糸条L1,L2の異常を検知する異常検知センサ91とを有する張力付与装置1を備える。この巻糸装置は、異常検知センサ91により糸条L1,L2の異常が検知された場合、少なくとも一つのバネ部材21又は22の引張力を喪失させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、複数本の糸条部材を個別に巻き取る巻糸装置に関する。
【背景技術】
【0002】
糸条部材を巻き取る巻糸装置などにおいては、糸条部材にテンション(張力)を付与しながら巻き取る必要がある。従って、従来の巻糸装置などには、糸条部材に張力を付与するための機構が設けられている。そのような機構について、たとえば、特許文献1および2に開示されている。特許文献1は、複数の糸を紡ぎ合わせて一本に合糸して巻き取る装置(合糸機)について開示しており、各糸ごとに張力を付与する部材を、各糸の糸路ごとに配設し、各糸の張力を調整しながら合糸している。特許文献2は、複数のワイヤーコード(糸条部材)の各々に張力を付与する装置について開示しており、各ワイヤーコードの張力を個別に測定して、その測定した張力に応じてワイヤーコードに適度な張力を付与するように制御している。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平10−297825号公報
【特許文献2】実開平4−15524号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1においては、複数の糸条部材それぞれに張力を付与するに際して、均等に張力を付与し続けるのは非常に困難である。また、特許文献2においては、均等に張力を付与するために、複数の糸条部材の張力を測定する装置と、測定値に応じて張力を制御するための装置とを備えており、構成が複雑であり、コストもかかる。
【0005】
本発明は、上記したような問題点に鑑みてなされたものであって、簡易な構成で、各糸条部材に均等にテンションを付与し続けることができる巻糸装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明にかかる巻糸装置は、複数本の糸条部材を個別に巻き取る巻糸装置であって、各糸条部材にそれぞれテンションを付与する複数のローラからなるローラ群と、並列的に配置され、ローラ群に引張力を作用させる複数の引張部材と、各糸条部材の異常を検知する異常検知センサとを備える。この巻糸装置は、異常検知センサにより糸条部材の異常が検知された場合、少なくとも一つの引張部材の引張力を喪失または減少させる。
【0007】
これによれば、複数の引張部材によりローラ群に引張力を作用させるため、各糸条部材にテンションを均等に付与することができる。また、糸条部材が切れるなどして糸条部材に異常が生じた場合、並列的に配置された複数の引張部材のうち、少なくとも一つの引張部材の引張力を喪失または減少させるため、ローラ群に作用する引張力も減少して、残りの糸条部材に対するテンションを一定にすることができる。
【0008】
従って、通常時および異常時のいずれにおいても、各糸条部材に均等なテンションを付与し続けることができるため、複数本の糸条部材を安定して巻き取ることが可能となる。
【0009】
また、少なくとも一つの引張部材に連結され、該引張部材の引張力に抗して回転可能な回転部材と、該回転部材の回転を規制する回転規制装置とを備え、通常の場合、回転規制装置により回転部材の回転を所定位置で規制することによって引張部材に引張力を生じさせる一方、異常検知センサにより糸条部材の異常が検知された場合、回転規制装置による回転部材の回転の規制を解除することにより、当該回転部材に連結された引張部材の引張力を喪失または減少させるのが好ましい。これによれば、引張部材の引張力を機械的な構成によって喪失または減少させることができる。
【0010】
また、引張部材はバネ部材であるのが好ましい。これによれば、簡単な構成で糸条部材に引張部材の引張力を作用させることができる。
【0011】
また、ローラ群は固定ローラ及び移動ローラからなり、引張部材の引張力に基づいて、移動ローラを固定ローラに対して離間方向に移動させることにより各糸条部材にテンションを付与するのが好ましい。これによれば、簡易な構成で糸条部材に引張部材の引張力を作用させることができる。
【0012】
また、移動ローラを固定ローラに対して離間方向に回動させる回動機構を備えるのが好ましい。これによれば、引張部材の引張力を機械的な構成によって作用させることができる。
【0013】
また、引張部材は空気が供給されることにより引張力を作用させるエアシリンダであるのが好ましい。これによれば、空気を供給することにより引張力を容易に作用させることができるとともに、空気の供給を停止することにより引張力を容易に喪失または減少させることができる。
【発明の効果】
【0014】
本発明によれば、複数の引張部材でローラ群に引張力を作用させるため、各ローラにおける各糸条部材にテンションを均等に付与することができるとともに、糸条部材が切れるなどして糸条部材に異常が生じた場合、並列的に配置された複数の引張部材のうち、少なくとも一つの引張部材の引張力を喪失または減少させるため、ローラ群に作用する引張力も減少して、残りの糸条部材に対するテンションを一定にすることができる。
【0015】
従って、通常時および異常時のいずれにおいても、各糸条部材に均等なテンションを付与し続けることができるため、複数本の糸条部材を安定して巻き取ることができる巻糸装置を提供することが可能となる。
【図面の簡単な説明】
【0016】
【図1】巻糸装置における張力付与装置の正面図である。
【図2】ボビンを示す概略図である。
【図3】張力付与装置の要部拡大図である。
【図4】図3のIV−IVにおける矢視図である。
【図5】回転部材および回転規制装置の(a)拡大正面図と(b)左側面図とを示す。
【図6】電気的な接続を示すブロック図である。
【図7】糸条が1本切れた場合を示す張力付与装置の正面図である。
【図8】他の実施形態における張力付与装置の斜視図である。
【図9】図8に示す張力付与装置の側面図である。
【図10】図8に示す張力付与装置の背面図である。
【図11】電気的な接続を示すブロック図である。
【発明を実施するための形態】
【0017】
(第1の実施形態)
次に、本発明に係る巻糸装置の一実施形態について図面を参照しつつ説明する。巻糸装置は、複数本の糸条部材(以下「糸条」という)を個別に巻き取るに際して、張力を付与する張力付与装置1を備える。なお、ここにおける糸条は、扁平な断面形状を有するテープ状の繊維束であるものとして説明するが、糸条部材であれば任意のものであってもよい。
【0018】
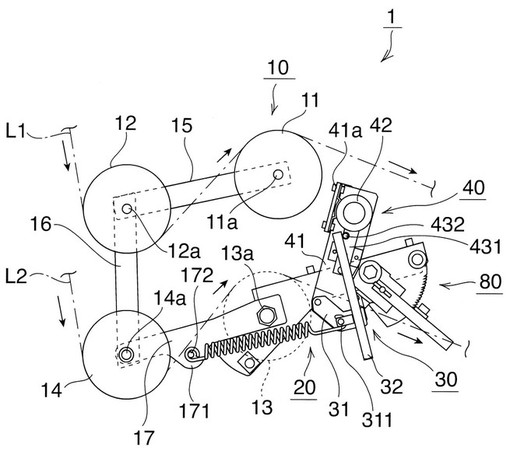
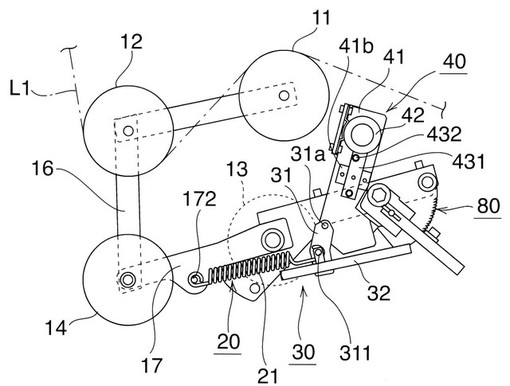
張力付与装置1は、後述のボビン70に糸条が巻き取られるまでの工程に設けられる。張力付与装置1は、図1に示すように、複数のローラが互いに連結されたローラ群10と、ローラ群10に引張力を作用させる引張装置20と、回転可能に設けられた回転部材30と、回転部材30の回転を規制する回転規制装置40と、引張装置20の引張力を調整する引張力調整部80と、糸条の異常を検知する異常検知センサ91とを備える。この張力付与装置1は、張力を付与しながらL1およびL2で示す2本の糸条を並行してボビン70に搬送する。糸条L1,L2は、図1において、各々の近傍に示す矢印の方向に搬送される。張力付与装置1を経た糸条L1,L2は、図2に示すボビン70に巻き取られる。このボビン70は、一本の巻糸軸71の両端に2本の糸条L1,L2の各々を同時に巻き取るための巻取部72,73を備えている。図示しないが、図2の上方においては、各糸条L1,L2の綾振りを行う綾振り機が設けられており、綾振り機により糸条L1,L2は均等にボビン70の巻取部72,73に巻き取られる。
【0019】
前記ローラ群10は、図1に示すように、それぞれ円盤形状に形成され、同一平面方向に回転可能である固定ローラ(以下「第1ローラ」という)11、移動ローラ(以下「第2ローラ」という)12、固定ローラ(以下「第3ローラ」という)13、移動ローラ(以下「第4ローラ」という)14の4つを備え、第1ローラ11および第2ローラ12が糸条L1を搬送し、第3ローラ13および第4ローラ14が糸条L2を搬送する。また、ローラ群10の近傍には、種々の構成部品などを支持可能な部材(以下「支持部材」という)が設けられている。
【0020】
第1ローラ11は、図示略の支持部材に固定され、回転軸11aを有する。従って、第1ローラ11は、所定の位置に固定された状態で回転する。また、この第1ローラ11に隣接する位置に、長尺の第1支持アーム15が設けられている。第1支持アーム15は、回転軸11aと同一の位置に回動軸を有し、第1ローラ11と同一平面方向に回動可能である。
【0021】
第2ローラ12は、回転軸12aを有し、第1支持アーム15の他方端に設けられている。従って、第2ローラ12は、第1支持アーム15の回動に伴って移動可能であり、第1支持アーム15の先端部で回転する。
【0022】
上記の構成においては、図1に示すように、上方から搬送されてくる糸条L1を第2ローラ12の左側から下側を回って右側に掛け回し、第1ローラ11の左側から上側を回って右側に巻架させて搬送するため、第2ローラ12により糸条L1に下向きのテンションを付与することが可能になる。
【0023】
第3ローラ13は、回転軸13aを有し、第1ローラ11の下方側において図示略の支持部材に固定される。従って、第3ローラ13は、所定の位置に固定された状態で回転する。また、この第3ローラ13に隣接する位置に、長尺の第2支持アーム17が設けられている。第2支持アーム17は、回転軸13aと同一の位置に回動軸を有し、第3ローラ13と同一平面方向に回動可能である。また、第2支持アーム17は、略中間部において下方側に幅広に形成された幅広部171を有している。この幅広部171は、少なくとも第3ローラ13の回転軸13aと第4ローラ14の回転軸14aとを結ぶ直線よりも下方側に設けられて、後述の引張装置20を接続させる固定フック部172を有する。
【0024】
第4ローラ14は、回転軸14aを有し、第2支持アーム17の他方端に設けられ、第2ローラ12と同様、第2支持アーム17の回動に伴って移動可能であり、第2支持アーム17の先端部で回転する。
【0025】
上記の構成においては、図1に示すように、上方から搬送されてくる糸条L2を第4ローラ14の左側から下側を回って右側に掛け回し、第3ローラ13の左側から上側を回って右側に巻架させて搬送するため、糸条L1と同様に、第4ローラ14により糸条L2に下向きのテンションを付与することが可能になる。
【0026】
また、ローラ群10において、第2ローラ12と第4ローラ14とを連結する長尺の連結部材16が設けられている。この連結部材16は、第2ローラ12および第4ローラ14と接続する部分が回転可能に構成されている。従って、連結部材16により、第2ローラ12と第4ローラ14とが一体的に動作するため、後述する引張装置20の第1バネ部材21による引張力Tおよび第2バネ部材22による引張力Tの合力2Tをローラ群10全体に作用させることができ、かつ、糸条L1,L2に均等なテンションを付与することが可能となる。
【0027】
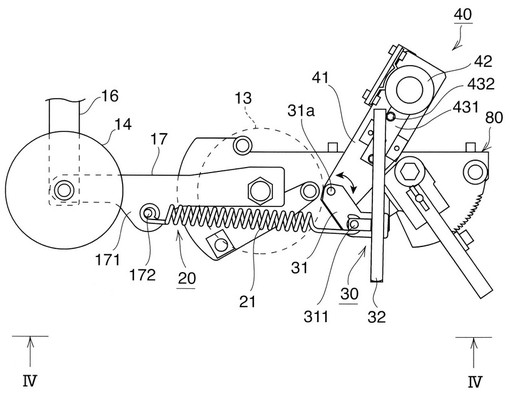
前記引張装置20は、図3および図4に示すように、第1バネ部材21と第2バネ部材22とを並列的に備え、前述した第2支持アーム17と後述する回転部材30および基部41を接続する。この実施形態において、第1バネ部材21および第2バネ部材22は、弾性部材として同一の性質を有する。
【0028】
第1バネ部材21は、図4に示すように、一方が第2支持アーム17の固定フック部172に接続され、他方が回転部材30の第1フック部311に接続されている。後述するが、第1フック部311は、回転部材30に設けられていることより位置が変位するため、固定フック部172と第1フック部311との距離が変わる。このことに伴って、第1バネ部材21の引張力が変化するため、第1バネ部材21は引張力が可変である。
【0029】
一方、第2バネ部材22は、一方が固定フック部172に接続され、他方が後述の基部41に固定された第2フック部41cに接続されている。第2フック部41cは、図示略の支持部材に固定される基部41に設けられていることより位置が不変のため、第2バネ部材22の引張力は不変である。なお、ここにおいて、第2バネ部材22は、所定分だけ伸長している状態で設けられており、所定の引張力Tを有している。
【0030】
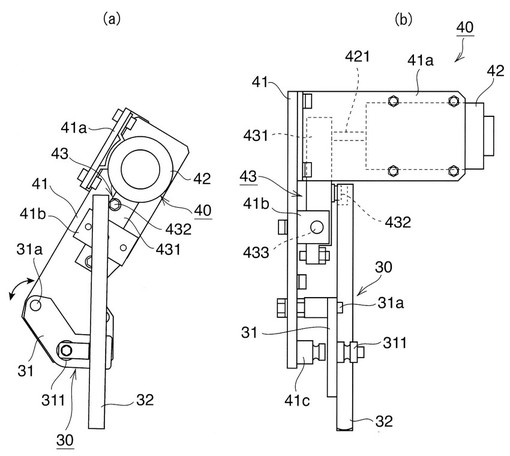
前記回転部材30は、図5(a)に示すように、図示略の支持部材に固定された基部41によって支持されており、略くの字状のリンク部材31と、リンク部材31に固定された回転レバー32とを備え、回転軸31aを中心に、図3中および図5(a)中に示す矢印の方向に回転可能である。
【0031】
リンク部材31は、一方端が回転軸31aに接続されている。また、リンク部材31は、略中間部において第1フック部311を有している。この第1フック部311は、前述したように第1バネ部材21と接続されている。
【0032】
回転レバー32は、リンク部材31の他方端側に略直交するように固定され、回転する平面方向に延びる棒部材である。
【0033】
上記の構成においては、第1バネ部材21が接続されるため、回転部材30全体は時計方向に引張力を受け得る。従って、たとえば、人の手などによって第1バネ部材21の引張力に抗して回転部材30を反時計方向に回転させることにより、第1フック部311の位置を変位させることができるため、第1フック部311に接続される第1バネ部材21の伸縮を変化させて、第1バネ部材21に引張力を保持させることができる。一方で、回転部材30を回転させた手を離すと、第1バネ部材21の保持する引張力により、時計方向に回転することとなる。
【0034】
なお、固定フック部172と第1フック部311とが所定の間隔以上近接した場合、第1バネ部材21が引張力を有さない状態となるように構成する。たとえば、第1バネ部材21の自然長が該所定の間隔よりも長いものを用いる。
【0035】
前記回転規制装置40は、図5(a)に示すように、回転部材30と同様、前述の基部41によって支持されており、回転部材30に隣接している。この回転規制装置40は、シリンダ部42と、係止部材43と、制御部45を備える。
【0036】
シリンダ部42は、基部41の端部に設けられたシリンダ基部41aに支持され、基部41と間隔を隔てて設けられている。また、シリンダ部42は、図5(b)に示すように、基部41側に押出ロッド421を有し、後述する制御部45からの信号に基づいて押出ロッド421を図5(b)中の左方向に向かって突出させる。なお、押出ロッド421が突出する方向は、回転部材30の回転レバー32の回転方向に直交する方向である。
【0037】
係止部材43は、押出ロッド421に当設され、回転レバー32の回転軌道の近傍に設けられる揺動部431と、所定の高さを有し、回転レバー32の回転軌道内に突設された凸部432と、基部41に固定され、揺動軸433を有し、回転レバー32の回転軌道の直交方向に揺動部材431を揺動可能に支持する揺動部材基部41bとを備える。従って、揺動部材431が、図5(b)中の左方向に揺動することにより、回転レバー32の回転軌道から凸部432を外すことができる。なお、凸部432の所定の高さは、揺動部材431が揺動することにより、回転レバー32の回転軌道から外れる程度である。
【0038】
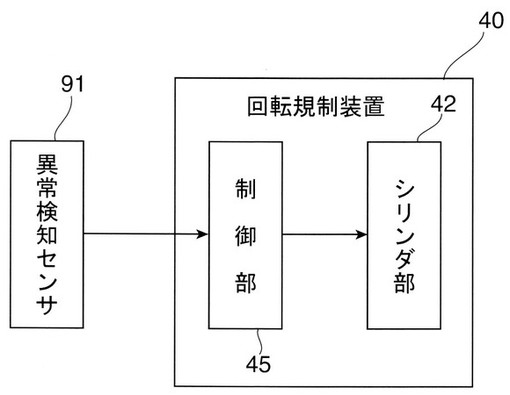
制御部45は、図6に示すように、後述の異常検知センサ91からの信号に基づいて、シリンダ部42の動作を制御する。具体的に、制御部45は、異常検知センサ91からの信号に応じてシリンダ部42に押出ロッド421を図5(b)の左方向に突出させるように制御する。
【0039】
この回転規制装置40によれば、シリンダ部42が押出ロッド421を突出することにより、揺動部材431が揺動して、凸部432を回転レバー32の回転軌道から外すことができる。なお、この実施形態において、回転規制装置40は、第2バネ部材22の保持する引張力Tと同一の引張力を第1バネ部材21が保持する位置で回転レバー32の回転を規制する位置に設けられる。
【0040】
従って、上記した回転部材30と回転規制装置40とにおいては、図1に示すように、回転レバー32を反時計方向に回転させることにより、第1バネ部材21のみを伸長させることが可能になるため、第1バネ部材21に引張力Tを保持させることができる。また、回転規制装置40の凸部432により、回転レバー32の回転軌道を塞ぐことで回転レバー32の回転を規制し、第1バネ部材21が保持する引張力Tを維持させることが可能になる。一方、回転規制装置40の凸部432による回転レバー32の回転の規制を解除することにより、第1バネ部材21が保持する引張力Tを喪失させることができる。このように、デジタルでの制御ではなく機械的な構成によって引張力を喪失させるため、コストを抑えることができる。
【0041】
前記引張力調整部80は、図3に示すように、回転部材30の近傍に設けられている。引張力調整部80は、第1バネ部材21および第2バネ部材22が接続される第1フック部311および第2フック部41cともう一方側の固定フック部172との距離を変更可能にさせる。これらの距離を変更することにより、第1バネ部材21および第2バネ部材22の引張力を任意で調整することが可能になるため、第1バネ部材21および第2バネ部材22に適度な引張力を保持させることが可能である。
【0042】
前記異常検知センサ91は、搬送されている糸条L1,L2の異常を検知する。図6に示すように、異常検知センサ91は、たとえば、搬送中に糸条L2が切れた場合、糸条L2が切れたことを検知して、回転規制装置40の制御部45にその旨の信号を出力する。制御部45は、受信した信号に応じて、シリンダ部42に信号を出力し、押出ロッド421を突出させる旨の信号を出力する。
【0043】
次に、張力付与装置1の動作について説明する。張力付与装置1は、図1に示すように、引張装置20の第1バネ部材21が引張力Tを有するように、回転部材30を反時計方向に回転させる。回転後の回転部材30における回転レバー32を回転規制装置40の凸部432により係止させて、回転レバー32の回転を規制する。このことにより、回転部材30に接続される第1バネ部材21は引張力Tを有する状態で維持される。このとき、引張装置20は第1バネ部材21および第2バネ部材22により引張力2Tを有する状態であるため、ローラ群10全体には反時計方向に、また、回転部材30には時計方向にモーメントがかかっている状態で維持されている。
【0044】
このことにより、第1ローラ11および第2ローラ12に巻架されて搬送される糸条L1と、第3ローラ13および第4ローラ14に巻架されて搬送される糸条L2とには、引張装置20の第1バネ部材21と第2バネ部材22との2本による引張力2Tに基づくテンションが均等に分散されて付与される。
【0045】
以上より、2本に並列して配置した第1バネ部材21および第2バネ部材22に基づく引張力をローラ群10全体に作用させるため、各糸条L1,L2に均等なテンションを付与することができる。
【0046】
また、2本の糸条L1,L2を搬送している際に、たとえば、糸条L2が切れた場合、糸条L2が切れたことを異常検知センサ91が検知する。異常検知センサ91は回転規制装置40の制御部45にその旨の信号を出力する。その信号を受信した制御部45は、シリンダ部42に押出ロッド421を突出させる旨の信号を出力する。その信号に応じて、シリンダ部42が押出部ロッド421を突出させることにより、図5(b)における左方向に揺動部材431が揺動される。この揺動により、揺動部材431に設けられた凸部432が回転レバー32の回転軌道から外れて、回転レバー32の回転の規制が解除される。このことにより、図7に示すように、第1バネ部材21が回転部材30を回転させて、第1バネ部材21が自然長になる。すると、第1バネ部材21の保持していた引張力Tがローラ群10に作用しなくなり、第2バネ部材22の引張力Tのみがローラ群10全体に作用することになる。
【0047】
従って、切れていない残った糸条L1には、第2バネ部材22の引張力Tのみに基づくテンションを、ローラ群10を介して付与することができる。すなわち、いずれかの糸条が切れるなどの異常が生じた場合、並列的に配置された2本の第1バネ部材21および第2バネ部材22のうち、少なくとも一つのバネ部材の引張力Tを喪失させるため、ローラ群10に作用する引張力も喪失されて、残りの糸条に対するテンションを一定にすることができる。
【0048】
以上より、通常時および異常時のいずれにおいても、各糸条に均等なテンションを付与し続けることができるため、2本の糸条L1,L2を安定して巻き取ることが可能となる。
【0049】
(第2の実施形態)
次に、本発明に係る巻糸装置の他の実施形態について説明する。以下の説明において、第1の実施形態と同様の構成については同一の符号を付し、その説明は省略する。
【0050】
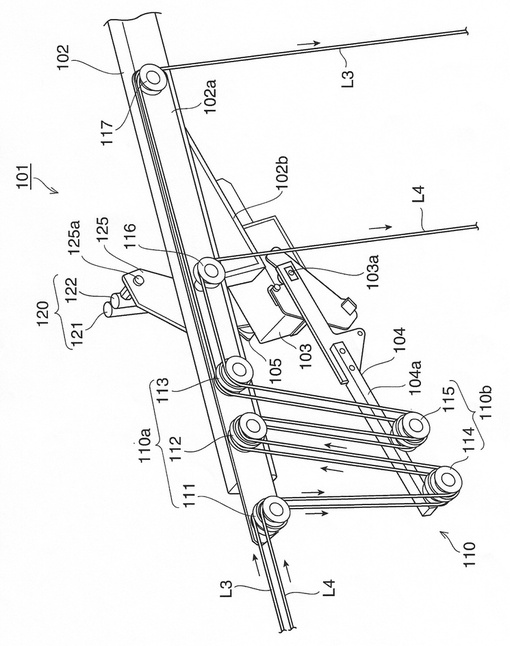
この実施形態における巻糸装置は、2本の糸条L3、L4を個別に巻き取るに際して、張力を付与する張力付与装置101を備えている。この張力付与装置101は、図8に示すように、略水平方向に延びる棒状の固定支持アーム102と、固定支持アーム102の略下側に設けられる回転伝達ボックス103と、固定支持アーム102に対して近接離間方向に回動する回動支持アーム104と、固定支持アーム102および回動支持アーム104に設けられた複数のローラからなるローラ群110と、回動支持アーム104の回動に連動して回動する回動リンク部材105と、回動リンク部材105を介してローラ群110に引張力を作用させる引張装置120と、糸条L3、L4の異常を検知する異常検知センサ92とを備える。なお、2本の糸条L3、L4は、図8中の各々の近傍に示した矢印の方向に搬送され、その後、張力付与装置101の下方に設けられた図2のボビン70に個別に巻き取られる。
【0051】
前記固定支持アーム102は、図示略の巻糸装置における固定部分に略水平方向に延びるように固設されており、以下で説明する各構成を保持する基部として作用する。また、固定支持アーム102は、正面側および背面側の側部において垂直な面を有しており、このうちの正面側の面については、後述する複数のローラを固定させるためのローラ固定プレート102aが設けられている。
【0052】
前記回転伝達ボックス103は、固定支持アーム102の下側に設けられた保持部材102bによって固定支持アーム102の下側に固定されている。また、回転伝達ボックス103は正面から背面に貫通している回転軸103aを有している。この回転軸103aは、軸方向に回転可能に構成され、正面側の突出部分において回動支持アーム104を固定させ、背面側の突出部分において回動リンク部材105を固定させている。従って、回転伝達ボックス103は、回転軸103aを介して回動支持アーム104と回動リンク部材105との回動を連動させる。
【0053】
また、回転伝達ボックス103は、図9に示すように、背面側において引張装置120を保持させるための引張装置固定プレート125を垂直方向に備えている。従って、引張装置固定プレート125によって引張装置120を固定的に保持することが可能である。
【0054】
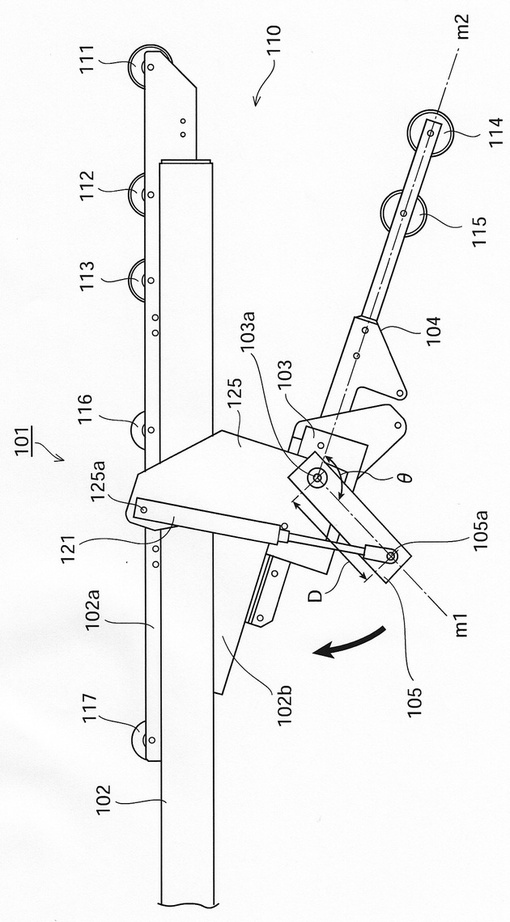
前記回動支持アーム104は、図8に示すように、略棒状部材であり、回転軸103aに固定されていることによって固定支持アーム102に対して近接離間方向に回動可能である。この回動支持アーム104は、正面側において垂直な面104aを有しており、図9に示すように、この垂直な面104aが固定支持アーム102のローラ固定プレート102aと略同一平面を形成している。従って、固定支持アーム102および回動支持アーム104に設けられる複数のローラは、略同一平面において回転する。
【0055】
前記ローラ群110は、図8に示すように、固定支持アーム102により支持される固定ローラ群110a(第1ローラ111〜第3ローラ113)と、回動支持アーム104により支持される移動ローラ群110b(第4ローラ114および第5ローラ115)とを備える。各ローラ111〜115は、上記したように各々略同一の平面において回転するため、糸条を巻架させて搬送することが可能である。また、固定支持アーム102に設けられる第6ローラ116は糸条L4のみをボビン70に搬送し、第7ローラ117は糸条L3のみをボビン70に搬送するためのローラである。
【0056】
第1ローラ111〜第3ローラ113は、固定支持アーム102のローラ固定プレート102aに略直線的に配置され、糸条L3、L4の2本を搬送するため各々2つのローラを並列に備えている。
【0057】
一方、第4ローラ114および第5ローラ115は、回動支持アーム104の垂直な面104aに略直線的に配置されている。従って、第4ローラ114および第5ローラ115は、回動支持アーム104の回動により固定支持アーム102に設けられた第1ローラ111〜第3ローラ113に対して近接離間方向に回動する。また、これら第4ローラ114および第5ローラ115も、第1ローラ111〜第3ローラ113と同様、糸条L3、L4の2本を搬送するためのローラを2つずつ並列に備えている。
【0058】
このローラ群110において、糸条L3、L4は、第1ローラ111、第4ローラ114、第2ローラ112、第5ローラ115、第3ローラ113の順に巻架され、糸条L4のみが第6ローラ116を経由して、次の工程(ボビン70での巻き取り)へと搬送される。また、糸条L3のみが第7ローラ117を経由して、糸条L3と同様次の工程へと搬送される。このように、糸条L3、L4を複数のローラに巻架させることにより、糸条L3、L4を搬送するに際して張力を付与させることができる。また、第1ローラ111〜第5ローラ115により略同一の環境の糸路で糸条L3、L4が搬送されるため、糸条L3、L4に均等なテンションを付与することが可能である。
【0059】
前記回動リンク部材105は、図10に示すように、回転伝達ボックス103の背面側から突出した回転軸103aに固設されているプレート部材であり、上記したように、回転軸103aを介して、回動支持アーム104の回動に連動して一体的に回動する。この回動リンク部材105は、回転軸103aから所定の距離Dだけ離れた位置に引張装置120を連結させる連結部105aを有している。また、回転軸103aおよび連結部105aを結んだ直線m1(図10中における一点鎖線)と、回転軸103aから回動支持アーム104の延びる方向に引いた直線m2(図10中における一点鎖線)との挟角θが、90度<θ<180度となるように構成されている。こうすることにより、後述の引張装置120の引張力をモーメントとして効率的に作用させることができる。なお、ここにおいて一体となった回転軸103a、回動支持アーム104および回動リンク部材105とそれらを回動させる回転伝達ボックス103とは、回動機構として作用する。
【0060】
前記引張装置120は、図9に示すように、第1エアシリンダ121および第2エアシリンダ122の2つを並列的に備えている。これらの両エアシリンダ121、122は、一方端が回動リンク部材105の連結部105aに接続され、また、他方端が引張装置固定プレート125の接続部125aに接続されており、いずれの接続部分においても各エアシリンダ121、122が回動可能に構成されている。ここにおいて、接続部125aは、引張装置固定プレート125および回転伝達ボックス103を介して固定支持アーム102に固定されており、また、連結部105aは、回転リンク部材105および回転軸103aを介して回動支持アーム104に固定されている。このようにして、第1エアシリンダ121および第2エアシリンダ122が接続されているため、引張装置120は、第1ローラ111〜第5ローラ115が設けられる固定支持アーム102および回動支持アーム104に引張力を作用させることが可能である。また、第1エアシリンダ121および第2エアシリンダ122は、後述の空気供給装置130によりそれぞれ別個に空気が供給され、この空気の供給によって各々が引張力T(合計して引張力2T)を保持するように構成されている。
【0061】
これらの第1エアシリンダ121および第2エアシリンダ122は、空気供給装置130によって引張力2Tを保持し、その保持した引張力2Tにより回動リンク部材105の連結部105aを引っ張るため、図10において矢印で示す時計方向に回動リンク部材105が回動する。このように、引張装置120は、回動リンク部材105と一体である回動支持アーム104に引張力2Tを作用させる。
【0062】
また、第1エアシリンダ121および第2エアシリンダ122は、空気供給装置130によって空気の供給が停止されると、それに相当する分だけの引張力を喪失する。たとえば、第1エアシリンダ121への空気の供給が停止されると、継続して空気が供給されている第2エアシリンダ122の引張力Tのみを回動支持アーム104に作用させることとなる。換言すれば、各エアシリンダ121、122への空気の供給を行うことにより引張力を容易に作用させることができるとともに、各エアシリンダ121、122への空気の供給を停止することにより引張力を容易に喪失させることができる。
【0063】
なお、引張装置120における両エアシリンダ121、122は並列的に設けられていることより、張力付与装置101の一方側(この実施形態においては背面側)に集約されているため、巻糸装置における基台内部に設置することができ、巻糸装置の小型化を図ることも可能である。
【0064】
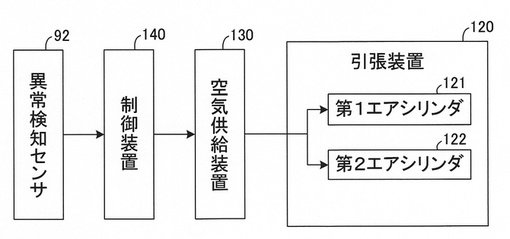
ここにおいて、上記した空気供給装置130は、制御装置140により引張装置120の各エアシリンダ121、122に空気を供給するか否かが制御される。この制御装置140は、図11に示すように、異常検知センサ92から送信される糸条L3、L4の異常についての信号を受信する。受信した信号に基づいて、制御装置140は、空気供給装置130に第1エアシリンダ121および第2エアシリンダ122に空気を供給させるか否かについての信号を送信する。空気供給装置130は、受信した信号に基づいて、第1エアシリンダ121および第2エアシリンダ122に空気の供給および停止を行う。なお、ここにおける異常検知センサ92は、糸条L3、L4の異常についての信号を制御装置140に送信する以外は、第1の実施形態における異常検知センサ91と同一の構成である。
【0065】
次に、張力付与装置101の動作について説明する。張力付与装置101は、図8に示すように、巻架されて搬送される糸条L3、L4に所望の張力を作用させるようにする。具体的には、空気供給装置130により空気を第1エアシリンダ121および第2エアシリンダ122に供給することによって引張装置120に引張力2Tを保持させ、回動リンク部材105および回転軸103aを介して、回動支持アーム104を固定支持アーム102の離間方向に回動させた状態に構成して糸条L3、L4を搬送する。こうすることにより、引張装置120の第1エアシリンダ121および第2エアシリンダ122に基づく引張力2Tがローラ群110に作用されるため、第1ローラ111〜第5ローラ115に巻架されて搬送される糸条L3、L4に均等なテンションを付与することができる。
【0066】
また、2本の糸条L3,L4を搬送している際に、たとえば、糸条L3が切れた場合、糸条L3が切れたことを異常検知センサ92が検知する。異常検知センサ92は、制御装置140にその旨の信号を送信する。その信号を受信した制御装置140は、空気供給装置130に第1エアシリンダ121への空気の供給を停止する旨の信号を送信する。この信号に応じて、第1エアシリンダ121への空気の供給が停止されることにより、引張装置120の保持していた引張力2Tから、第1エアシリンダ121分の引張力Tが喪失される。従って、引張装置120の引張力は第2エアシリンダ122のみの引張力Tとなり、第2エアシリンダ122の引張力Tのみがローラ群110に作用される。
【0067】
上記のように、切れずに残った糸条L4には、ローラ群110を介して第2エアシリンダ122の引張力Tのみに基づくテンションを付与することができる。従って、いずれかの糸条が切れるなどの異常が生じた場合、並列的に配置された2本の第1エアシリンダ121および第2エアシリンダ122のうち、少なくとも一つのエアシリンダの引張力Tを喪失させるため、ローラ群110に作用する引張力も喪失されて、残りの糸条に対するテンションを一定にすることができる。
【0068】
以上より、通常時および異常時のいずれにおいても、各糸条に均等なテンションを付与し続けることができるため、2本の糸条L3,L4を安定して巻き取ることが可能となる。
【0069】
なお、上記の実施形態において、引張部材として空気圧を利用したエアシリンダを用いる場合について説明したが、これに限ることなく、油圧を利用する油圧シリンダを用いてもよい。
【0070】
また、2本の糸条を巻き取る場合について説明したが、これに限ることなく、3本以上でもよい。なお、このとき、巻き取る糸条の数に対応させてバネ部材あるいはエアシリンダなどの数を増やす。
【0071】
また、複数のバネ部材またはエアシリンダのうちの少なくとも一つのバネ部材の引張力またはエアシリンダの引張力を喪失させる場合について説明したが、これに限ることなく、必要に応じた分だけの引張力を減少させるようにしてもよい。
【0072】
以上、図面を参照してこの発明の実施形態を説明したが、この発明は、図示した実施形態のものに限定されない。図示された実施形態に対して、この発明と同一の範囲内において、あるいは均等の範囲内において、種々の修正や変形を加えることが可能である。
【符号の説明】
【0073】
1、101…張力付与装置
10、110…ローラ群
110a…固定ローラ群
110b…移動ローラ群
11、111…第1ローラ
12、112…第2ローラ
13、113…第3ローラ
14、114…第4ローラ
115…第5ローラ
116…第6ローラ
117…第7ローラ
20、120…引張装置
21…第1バネ部材
22…第2バネ部材
30…回転部材
32…回転レバー
40…回転規制装置
91、92…異常検知センサ
102…固定支持アーム
103…回転伝達ボックス
104…回動支持アーム
105…回転リンク部材
121…第1エアシリンダ
122…第2エアシリンダ
【技術分野】
【0001】
本発明は、複数本の糸条部材を個別に巻き取る巻糸装置に関する。
【背景技術】
【0002】
糸条部材を巻き取る巻糸装置などにおいては、糸条部材にテンション(張力)を付与しながら巻き取る必要がある。従って、従来の巻糸装置などには、糸条部材に張力を付与するための機構が設けられている。そのような機構について、たとえば、特許文献1および2に開示されている。特許文献1は、複数の糸を紡ぎ合わせて一本に合糸して巻き取る装置(合糸機)について開示しており、各糸ごとに張力を付与する部材を、各糸の糸路ごとに配設し、各糸の張力を調整しながら合糸している。特許文献2は、複数のワイヤーコード(糸条部材)の各々に張力を付与する装置について開示しており、各ワイヤーコードの張力を個別に測定して、その測定した張力に応じてワイヤーコードに適度な張力を付与するように制御している。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平10−297825号公報
【特許文献2】実開平4−15524号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1においては、複数の糸条部材それぞれに張力を付与するに際して、均等に張力を付与し続けるのは非常に困難である。また、特許文献2においては、均等に張力を付与するために、複数の糸条部材の張力を測定する装置と、測定値に応じて張力を制御するための装置とを備えており、構成が複雑であり、コストもかかる。
【0005】
本発明は、上記したような問題点に鑑みてなされたものであって、簡易な構成で、各糸条部材に均等にテンションを付与し続けることができる巻糸装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明にかかる巻糸装置は、複数本の糸条部材を個別に巻き取る巻糸装置であって、各糸条部材にそれぞれテンションを付与する複数のローラからなるローラ群と、並列的に配置され、ローラ群に引張力を作用させる複数の引張部材と、各糸条部材の異常を検知する異常検知センサとを備える。この巻糸装置は、異常検知センサにより糸条部材の異常が検知された場合、少なくとも一つの引張部材の引張力を喪失または減少させる。
【0007】
これによれば、複数の引張部材によりローラ群に引張力を作用させるため、各糸条部材にテンションを均等に付与することができる。また、糸条部材が切れるなどして糸条部材に異常が生じた場合、並列的に配置された複数の引張部材のうち、少なくとも一つの引張部材の引張力を喪失または減少させるため、ローラ群に作用する引張力も減少して、残りの糸条部材に対するテンションを一定にすることができる。
【0008】
従って、通常時および異常時のいずれにおいても、各糸条部材に均等なテンションを付与し続けることができるため、複数本の糸条部材を安定して巻き取ることが可能となる。
【0009】
また、少なくとも一つの引張部材に連結され、該引張部材の引張力に抗して回転可能な回転部材と、該回転部材の回転を規制する回転規制装置とを備え、通常の場合、回転規制装置により回転部材の回転を所定位置で規制することによって引張部材に引張力を生じさせる一方、異常検知センサにより糸条部材の異常が検知された場合、回転規制装置による回転部材の回転の規制を解除することにより、当該回転部材に連結された引張部材の引張力を喪失または減少させるのが好ましい。これによれば、引張部材の引張力を機械的な構成によって喪失または減少させることができる。
【0010】
また、引張部材はバネ部材であるのが好ましい。これによれば、簡単な構成で糸条部材に引張部材の引張力を作用させることができる。
【0011】
また、ローラ群は固定ローラ及び移動ローラからなり、引張部材の引張力に基づいて、移動ローラを固定ローラに対して離間方向に移動させることにより各糸条部材にテンションを付与するのが好ましい。これによれば、簡易な構成で糸条部材に引張部材の引張力を作用させることができる。
【0012】
また、移動ローラを固定ローラに対して離間方向に回動させる回動機構を備えるのが好ましい。これによれば、引張部材の引張力を機械的な構成によって作用させることができる。
【0013】
また、引張部材は空気が供給されることにより引張力を作用させるエアシリンダであるのが好ましい。これによれば、空気を供給することにより引張力を容易に作用させることができるとともに、空気の供給を停止することにより引張力を容易に喪失または減少させることができる。
【発明の効果】
【0014】
本発明によれば、複数の引張部材でローラ群に引張力を作用させるため、各ローラにおける各糸条部材にテンションを均等に付与することができるとともに、糸条部材が切れるなどして糸条部材に異常が生じた場合、並列的に配置された複数の引張部材のうち、少なくとも一つの引張部材の引張力を喪失または減少させるため、ローラ群に作用する引張力も減少して、残りの糸条部材に対するテンションを一定にすることができる。
【0015】
従って、通常時および異常時のいずれにおいても、各糸条部材に均等なテンションを付与し続けることができるため、複数本の糸条部材を安定して巻き取ることができる巻糸装置を提供することが可能となる。
【図面の簡単な説明】
【0016】
【図1】巻糸装置における張力付与装置の正面図である。
【図2】ボビンを示す概略図である。
【図3】張力付与装置の要部拡大図である。
【図4】図3のIV−IVにおける矢視図である。
【図5】回転部材および回転規制装置の(a)拡大正面図と(b)左側面図とを示す。
【図6】電気的な接続を示すブロック図である。
【図7】糸条が1本切れた場合を示す張力付与装置の正面図である。
【図8】他の実施形態における張力付与装置の斜視図である。
【図9】図8に示す張力付与装置の側面図である。
【図10】図8に示す張力付与装置の背面図である。
【図11】電気的な接続を示すブロック図である。
【発明を実施するための形態】
【0017】
(第1の実施形態)
次に、本発明に係る巻糸装置の一実施形態について図面を参照しつつ説明する。巻糸装置は、複数本の糸条部材(以下「糸条」という)を個別に巻き取るに際して、張力を付与する張力付与装置1を備える。なお、ここにおける糸条は、扁平な断面形状を有するテープ状の繊維束であるものとして説明するが、糸条部材であれば任意のものであってもよい。
【0018】
張力付与装置1は、後述のボビン70に糸条が巻き取られるまでの工程に設けられる。張力付与装置1は、図1に示すように、複数のローラが互いに連結されたローラ群10と、ローラ群10に引張力を作用させる引張装置20と、回転可能に設けられた回転部材30と、回転部材30の回転を規制する回転規制装置40と、引張装置20の引張力を調整する引張力調整部80と、糸条の異常を検知する異常検知センサ91とを備える。この張力付与装置1は、張力を付与しながらL1およびL2で示す2本の糸条を並行してボビン70に搬送する。糸条L1,L2は、図1において、各々の近傍に示す矢印の方向に搬送される。張力付与装置1を経た糸条L1,L2は、図2に示すボビン70に巻き取られる。このボビン70は、一本の巻糸軸71の両端に2本の糸条L1,L2の各々を同時に巻き取るための巻取部72,73を備えている。図示しないが、図2の上方においては、各糸条L1,L2の綾振りを行う綾振り機が設けられており、綾振り機により糸条L1,L2は均等にボビン70の巻取部72,73に巻き取られる。
【0019】
前記ローラ群10は、図1に示すように、それぞれ円盤形状に形成され、同一平面方向に回転可能である固定ローラ(以下「第1ローラ」という)11、移動ローラ(以下「第2ローラ」という)12、固定ローラ(以下「第3ローラ」という)13、移動ローラ(以下「第4ローラ」という)14の4つを備え、第1ローラ11および第2ローラ12が糸条L1を搬送し、第3ローラ13および第4ローラ14が糸条L2を搬送する。また、ローラ群10の近傍には、種々の構成部品などを支持可能な部材(以下「支持部材」という)が設けられている。
【0020】
第1ローラ11は、図示略の支持部材に固定され、回転軸11aを有する。従って、第1ローラ11は、所定の位置に固定された状態で回転する。また、この第1ローラ11に隣接する位置に、長尺の第1支持アーム15が設けられている。第1支持アーム15は、回転軸11aと同一の位置に回動軸を有し、第1ローラ11と同一平面方向に回動可能である。
【0021】
第2ローラ12は、回転軸12aを有し、第1支持アーム15の他方端に設けられている。従って、第2ローラ12は、第1支持アーム15の回動に伴って移動可能であり、第1支持アーム15の先端部で回転する。
【0022】
上記の構成においては、図1に示すように、上方から搬送されてくる糸条L1を第2ローラ12の左側から下側を回って右側に掛け回し、第1ローラ11の左側から上側を回って右側に巻架させて搬送するため、第2ローラ12により糸条L1に下向きのテンションを付与することが可能になる。
【0023】
第3ローラ13は、回転軸13aを有し、第1ローラ11の下方側において図示略の支持部材に固定される。従って、第3ローラ13は、所定の位置に固定された状態で回転する。また、この第3ローラ13に隣接する位置に、長尺の第2支持アーム17が設けられている。第2支持アーム17は、回転軸13aと同一の位置に回動軸を有し、第3ローラ13と同一平面方向に回動可能である。また、第2支持アーム17は、略中間部において下方側に幅広に形成された幅広部171を有している。この幅広部171は、少なくとも第3ローラ13の回転軸13aと第4ローラ14の回転軸14aとを結ぶ直線よりも下方側に設けられて、後述の引張装置20を接続させる固定フック部172を有する。
【0024】
第4ローラ14は、回転軸14aを有し、第2支持アーム17の他方端に設けられ、第2ローラ12と同様、第2支持アーム17の回動に伴って移動可能であり、第2支持アーム17の先端部で回転する。
【0025】
上記の構成においては、図1に示すように、上方から搬送されてくる糸条L2を第4ローラ14の左側から下側を回って右側に掛け回し、第3ローラ13の左側から上側を回って右側に巻架させて搬送するため、糸条L1と同様に、第4ローラ14により糸条L2に下向きのテンションを付与することが可能になる。
【0026】
また、ローラ群10において、第2ローラ12と第4ローラ14とを連結する長尺の連結部材16が設けられている。この連結部材16は、第2ローラ12および第4ローラ14と接続する部分が回転可能に構成されている。従って、連結部材16により、第2ローラ12と第4ローラ14とが一体的に動作するため、後述する引張装置20の第1バネ部材21による引張力Tおよび第2バネ部材22による引張力Tの合力2Tをローラ群10全体に作用させることができ、かつ、糸条L1,L2に均等なテンションを付与することが可能となる。
【0027】
前記引張装置20は、図3および図4に示すように、第1バネ部材21と第2バネ部材22とを並列的に備え、前述した第2支持アーム17と後述する回転部材30および基部41を接続する。この実施形態において、第1バネ部材21および第2バネ部材22は、弾性部材として同一の性質を有する。
【0028】
第1バネ部材21は、図4に示すように、一方が第2支持アーム17の固定フック部172に接続され、他方が回転部材30の第1フック部311に接続されている。後述するが、第1フック部311は、回転部材30に設けられていることより位置が変位するため、固定フック部172と第1フック部311との距離が変わる。このことに伴って、第1バネ部材21の引張力が変化するため、第1バネ部材21は引張力が可変である。
【0029】
一方、第2バネ部材22は、一方が固定フック部172に接続され、他方が後述の基部41に固定された第2フック部41cに接続されている。第2フック部41cは、図示略の支持部材に固定される基部41に設けられていることより位置が不変のため、第2バネ部材22の引張力は不変である。なお、ここにおいて、第2バネ部材22は、所定分だけ伸長している状態で設けられており、所定の引張力Tを有している。
【0030】
前記回転部材30は、図5(a)に示すように、図示略の支持部材に固定された基部41によって支持されており、略くの字状のリンク部材31と、リンク部材31に固定された回転レバー32とを備え、回転軸31aを中心に、図3中および図5(a)中に示す矢印の方向に回転可能である。
【0031】
リンク部材31は、一方端が回転軸31aに接続されている。また、リンク部材31は、略中間部において第1フック部311を有している。この第1フック部311は、前述したように第1バネ部材21と接続されている。
【0032】
回転レバー32は、リンク部材31の他方端側に略直交するように固定され、回転する平面方向に延びる棒部材である。
【0033】
上記の構成においては、第1バネ部材21が接続されるため、回転部材30全体は時計方向に引張力を受け得る。従って、たとえば、人の手などによって第1バネ部材21の引張力に抗して回転部材30を反時計方向に回転させることにより、第1フック部311の位置を変位させることができるため、第1フック部311に接続される第1バネ部材21の伸縮を変化させて、第1バネ部材21に引張力を保持させることができる。一方で、回転部材30を回転させた手を離すと、第1バネ部材21の保持する引張力により、時計方向に回転することとなる。
【0034】
なお、固定フック部172と第1フック部311とが所定の間隔以上近接した場合、第1バネ部材21が引張力を有さない状態となるように構成する。たとえば、第1バネ部材21の自然長が該所定の間隔よりも長いものを用いる。
【0035】
前記回転規制装置40は、図5(a)に示すように、回転部材30と同様、前述の基部41によって支持されており、回転部材30に隣接している。この回転規制装置40は、シリンダ部42と、係止部材43と、制御部45を備える。
【0036】
シリンダ部42は、基部41の端部に設けられたシリンダ基部41aに支持され、基部41と間隔を隔てて設けられている。また、シリンダ部42は、図5(b)に示すように、基部41側に押出ロッド421を有し、後述する制御部45からの信号に基づいて押出ロッド421を図5(b)中の左方向に向かって突出させる。なお、押出ロッド421が突出する方向は、回転部材30の回転レバー32の回転方向に直交する方向である。
【0037】
係止部材43は、押出ロッド421に当設され、回転レバー32の回転軌道の近傍に設けられる揺動部431と、所定の高さを有し、回転レバー32の回転軌道内に突設された凸部432と、基部41に固定され、揺動軸433を有し、回転レバー32の回転軌道の直交方向に揺動部材431を揺動可能に支持する揺動部材基部41bとを備える。従って、揺動部材431が、図5(b)中の左方向に揺動することにより、回転レバー32の回転軌道から凸部432を外すことができる。なお、凸部432の所定の高さは、揺動部材431が揺動することにより、回転レバー32の回転軌道から外れる程度である。
【0038】
制御部45は、図6に示すように、後述の異常検知センサ91からの信号に基づいて、シリンダ部42の動作を制御する。具体的に、制御部45は、異常検知センサ91からの信号に応じてシリンダ部42に押出ロッド421を図5(b)の左方向に突出させるように制御する。
【0039】
この回転規制装置40によれば、シリンダ部42が押出ロッド421を突出することにより、揺動部材431が揺動して、凸部432を回転レバー32の回転軌道から外すことができる。なお、この実施形態において、回転規制装置40は、第2バネ部材22の保持する引張力Tと同一の引張力を第1バネ部材21が保持する位置で回転レバー32の回転を規制する位置に設けられる。
【0040】
従って、上記した回転部材30と回転規制装置40とにおいては、図1に示すように、回転レバー32を反時計方向に回転させることにより、第1バネ部材21のみを伸長させることが可能になるため、第1バネ部材21に引張力Tを保持させることができる。また、回転規制装置40の凸部432により、回転レバー32の回転軌道を塞ぐことで回転レバー32の回転を規制し、第1バネ部材21が保持する引張力Tを維持させることが可能になる。一方、回転規制装置40の凸部432による回転レバー32の回転の規制を解除することにより、第1バネ部材21が保持する引張力Tを喪失させることができる。このように、デジタルでの制御ではなく機械的な構成によって引張力を喪失させるため、コストを抑えることができる。
【0041】
前記引張力調整部80は、図3に示すように、回転部材30の近傍に設けられている。引張力調整部80は、第1バネ部材21および第2バネ部材22が接続される第1フック部311および第2フック部41cともう一方側の固定フック部172との距離を変更可能にさせる。これらの距離を変更することにより、第1バネ部材21および第2バネ部材22の引張力を任意で調整することが可能になるため、第1バネ部材21および第2バネ部材22に適度な引張力を保持させることが可能である。
【0042】
前記異常検知センサ91は、搬送されている糸条L1,L2の異常を検知する。図6に示すように、異常検知センサ91は、たとえば、搬送中に糸条L2が切れた場合、糸条L2が切れたことを検知して、回転規制装置40の制御部45にその旨の信号を出力する。制御部45は、受信した信号に応じて、シリンダ部42に信号を出力し、押出ロッド421を突出させる旨の信号を出力する。
【0043】
次に、張力付与装置1の動作について説明する。張力付与装置1は、図1に示すように、引張装置20の第1バネ部材21が引張力Tを有するように、回転部材30を反時計方向に回転させる。回転後の回転部材30における回転レバー32を回転規制装置40の凸部432により係止させて、回転レバー32の回転を規制する。このことにより、回転部材30に接続される第1バネ部材21は引張力Tを有する状態で維持される。このとき、引張装置20は第1バネ部材21および第2バネ部材22により引張力2Tを有する状態であるため、ローラ群10全体には反時計方向に、また、回転部材30には時計方向にモーメントがかかっている状態で維持されている。
【0044】
このことにより、第1ローラ11および第2ローラ12に巻架されて搬送される糸条L1と、第3ローラ13および第4ローラ14に巻架されて搬送される糸条L2とには、引張装置20の第1バネ部材21と第2バネ部材22との2本による引張力2Tに基づくテンションが均等に分散されて付与される。
【0045】
以上より、2本に並列して配置した第1バネ部材21および第2バネ部材22に基づく引張力をローラ群10全体に作用させるため、各糸条L1,L2に均等なテンションを付与することができる。
【0046】
また、2本の糸条L1,L2を搬送している際に、たとえば、糸条L2が切れた場合、糸条L2が切れたことを異常検知センサ91が検知する。異常検知センサ91は回転規制装置40の制御部45にその旨の信号を出力する。その信号を受信した制御部45は、シリンダ部42に押出ロッド421を突出させる旨の信号を出力する。その信号に応じて、シリンダ部42が押出部ロッド421を突出させることにより、図5(b)における左方向に揺動部材431が揺動される。この揺動により、揺動部材431に設けられた凸部432が回転レバー32の回転軌道から外れて、回転レバー32の回転の規制が解除される。このことにより、図7に示すように、第1バネ部材21が回転部材30を回転させて、第1バネ部材21が自然長になる。すると、第1バネ部材21の保持していた引張力Tがローラ群10に作用しなくなり、第2バネ部材22の引張力Tのみがローラ群10全体に作用することになる。
【0047】
従って、切れていない残った糸条L1には、第2バネ部材22の引張力Tのみに基づくテンションを、ローラ群10を介して付与することができる。すなわち、いずれかの糸条が切れるなどの異常が生じた場合、並列的に配置された2本の第1バネ部材21および第2バネ部材22のうち、少なくとも一つのバネ部材の引張力Tを喪失させるため、ローラ群10に作用する引張力も喪失されて、残りの糸条に対するテンションを一定にすることができる。
【0048】
以上より、通常時および異常時のいずれにおいても、各糸条に均等なテンションを付与し続けることができるため、2本の糸条L1,L2を安定して巻き取ることが可能となる。
【0049】
(第2の実施形態)
次に、本発明に係る巻糸装置の他の実施形態について説明する。以下の説明において、第1の実施形態と同様の構成については同一の符号を付し、その説明は省略する。
【0050】
この実施形態における巻糸装置は、2本の糸条L3、L4を個別に巻き取るに際して、張力を付与する張力付与装置101を備えている。この張力付与装置101は、図8に示すように、略水平方向に延びる棒状の固定支持アーム102と、固定支持アーム102の略下側に設けられる回転伝達ボックス103と、固定支持アーム102に対して近接離間方向に回動する回動支持アーム104と、固定支持アーム102および回動支持アーム104に設けられた複数のローラからなるローラ群110と、回動支持アーム104の回動に連動して回動する回動リンク部材105と、回動リンク部材105を介してローラ群110に引張力を作用させる引張装置120と、糸条L3、L4の異常を検知する異常検知センサ92とを備える。なお、2本の糸条L3、L4は、図8中の各々の近傍に示した矢印の方向に搬送され、その後、張力付与装置101の下方に設けられた図2のボビン70に個別に巻き取られる。
【0051】
前記固定支持アーム102は、図示略の巻糸装置における固定部分に略水平方向に延びるように固設されており、以下で説明する各構成を保持する基部として作用する。また、固定支持アーム102は、正面側および背面側の側部において垂直な面を有しており、このうちの正面側の面については、後述する複数のローラを固定させるためのローラ固定プレート102aが設けられている。
【0052】
前記回転伝達ボックス103は、固定支持アーム102の下側に設けられた保持部材102bによって固定支持アーム102の下側に固定されている。また、回転伝達ボックス103は正面から背面に貫通している回転軸103aを有している。この回転軸103aは、軸方向に回転可能に構成され、正面側の突出部分において回動支持アーム104を固定させ、背面側の突出部分において回動リンク部材105を固定させている。従って、回転伝達ボックス103は、回転軸103aを介して回動支持アーム104と回動リンク部材105との回動を連動させる。
【0053】
また、回転伝達ボックス103は、図9に示すように、背面側において引張装置120を保持させるための引張装置固定プレート125を垂直方向に備えている。従って、引張装置固定プレート125によって引張装置120を固定的に保持することが可能である。
【0054】
前記回動支持アーム104は、図8に示すように、略棒状部材であり、回転軸103aに固定されていることによって固定支持アーム102に対して近接離間方向に回動可能である。この回動支持アーム104は、正面側において垂直な面104aを有しており、図9に示すように、この垂直な面104aが固定支持アーム102のローラ固定プレート102aと略同一平面を形成している。従って、固定支持アーム102および回動支持アーム104に設けられる複数のローラは、略同一平面において回転する。
【0055】
前記ローラ群110は、図8に示すように、固定支持アーム102により支持される固定ローラ群110a(第1ローラ111〜第3ローラ113)と、回動支持アーム104により支持される移動ローラ群110b(第4ローラ114および第5ローラ115)とを備える。各ローラ111〜115は、上記したように各々略同一の平面において回転するため、糸条を巻架させて搬送することが可能である。また、固定支持アーム102に設けられる第6ローラ116は糸条L4のみをボビン70に搬送し、第7ローラ117は糸条L3のみをボビン70に搬送するためのローラである。
【0056】
第1ローラ111〜第3ローラ113は、固定支持アーム102のローラ固定プレート102aに略直線的に配置され、糸条L3、L4の2本を搬送するため各々2つのローラを並列に備えている。
【0057】
一方、第4ローラ114および第5ローラ115は、回動支持アーム104の垂直な面104aに略直線的に配置されている。従って、第4ローラ114および第5ローラ115は、回動支持アーム104の回動により固定支持アーム102に設けられた第1ローラ111〜第3ローラ113に対して近接離間方向に回動する。また、これら第4ローラ114および第5ローラ115も、第1ローラ111〜第3ローラ113と同様、糸条L3、L4の2本を搬送するためのローラを2つずつ並列に備えている。
【0058】
このローラ群110において、糸条L3、L4は、第1ローラ111、第4ローラ114、第2ローラ112、第5ローラ115、第3ローラ113の順に巻架され、糸条L4のみが第6ローラ116を経由して、次の工程(ボビン70での巻き取り)へと搬送される。また、糸条L3のみが第7ローラ117を経由して、糸条L3と同様次の工程へと搬送される。このように、糸条L3、L4を複数のローラに巻架させることにより、糸条L3、L4を搬送するに際して張力を付与させることができる。また、第1ローラ111〜第5ローラ115により略同一の環境の糸路で糸条L3、L4が搬送されるため、糸条L3、L4に均等なテンションを付与することが可能である。
【0059】
前記回動リンク部材105は、図10に示すように、回転伝達ボックス103の背面側から突出した回転軸103aに固設されているプレート部材であり、上記したように、回転軸103aを介して、回動支持アーム104の回動に連動して一体的に回動する。この回動リンク部材105は、回転軸103aから所定の距離Dだけ離れた位置に引張装置120を連結させる連結部105aを有している。また、回転軸103aおよび連結部105aを結んだ直線m1(図10中における一点鎖線)と、回転軸103aから回動支持アーム104の延びる方向に引いた直線m2(図10中における一点鎖線)との挟角θが、90度<θ<180度となるように構成されている。こうすることにより、後述の引張装置120の引張力をモーメントとして効率的に作用させることができる。なお、ここにおいて一体となった回転軸103a、回動支持アーム104および回動リンク部材105とそれらを回動させる回転伝達ボックス103とは、回動機構として作用する。
【0060】
前記引張装置120は、図9に示すように、第1エアシリンダ121および第2エアシリンダ122の2つを並列的に備えている。これらの両エアシリンダ121、122は、一方端が回動リンク部材105の連結部105aに接続され、また、他方端が引張装置固定プレート125の接続部125aに接続されており、いずれの接続部分においても各エアシリンダ121、122が回動可能に構成されている。ここにおいて、接続部125aは、引張装置固定プレート125および回転伝達ボックス103を介して固定支持アーム102に固定されており、また、連結部105aは、回転リンク部材105および回転軸103aを介して回動支持アーム104に固定されている。このようにして、第1エアシリンダ121および第2エアシリンダ122が接続されているため、引張装置120は、第1ローラ111〜第5ローラ115が設けられる固定支持アーム102および回動支持アーム104に引張力を作用させることが可能である。また、第1エアシリンダ121および第2エアシリンダ122は、後述の空気供給装置130によりそれぞれ別個に空気が供給され、この空気の供給によって各々が引張力T(合計して引張力2T)を保持するように構成されている。
【0061】
これらの第1エアシリンダ121および第2エアシリンダ122は、空気供給装置130によって引張力2Tを保持し、その保持した引張力2Tにより回動リンク部材105の連結部105aを引っ張るため、図10において矢印で示す時計方向に回動リンク部材105が回動する。このように、引張装置120は、回動リンク部材105と一体である回動支持アーム104に引張力2Tを作用させる。
【0062】
また、第1エアシリンダ121および第2エアシリンダ122は、空気供給装置130によって空気の供給が停止されると、それに相当する分だけの引張力を喪失する。たとえば、第1エアシリンダ121への空気の供給が停止されると、継続して空気が供給されている第2エアシリンダ122の引張力Tのみを回動支持アーム104に作用させることとなる。換言すれば、各エアシリンダ121、122への空気の供給を行うことにより引張力を容易に作用させることができるとともに、各エアシリンダ121、122への空気の供給を停止することにより引張力を容易に喪失させることができる。
【0063】
なお、引張装置120における両エアシリンダ121、122は並列的に設けられていることより、張力付与装置101の一方側(この実施形態においては背面側)に集約されているため、巻糸装置における基台内部に設置することができ、巻糸装置の小型化を図ることも可能である。
【0064】
ここにおいて、上記した空気供給装置130は、制御装置140により引張装置120の各エアシリンダ121、122に空気を供給するか否かが制御される。この制御装置140は、図11に示すように、異常検知センサ92から送信される糸条L3、L4の異常についての信号を受信する。受信した信号に基づいて、制御装置140は、空気供給装置130に第1エアシリンダ121および第2エアシリンダ122に空気を供給させるか否かについての信号を送信する。空気供給装置130は、受信した信号に基づいて、第1エアシリンダ121および第2エアシリンダ122に空気の供給および停止を行う。なお、ここにおける異常検知センサ92は、糸条L3、L4の異常についての信号を制御装置140に送信する以外は、第1の実施形態における異常検知センサ91と同一の構成である。
【0065】
次に、張力付与装置101の動作について説明する。張力付与装置101は、図8に示すように、巻架されて搬送される糸条L3、L4に所望の張力を作用させるようにする。具体的には、空気供給装置130により空気を第1エアシリンダ121および第2エアシリンダ122に供給することによって引張装置120に引張力2Tを保持させ、回動リンク部材105および回転軸103aを介して、回動支持アーム104を固定支持アーム102の離間方向に回動させた状態に構成して糸条L3、L4を搬送する。こうすることにより、引張装置120の第1エアシリンダ121および第2エアシリンダ122に基づく引張力2Tがローラ群110に作用されるため、第1ローラ111〜第5ローラ115に巻架されて搬送される糸条L3、L4に均等なテンションを付与することができる。
【0066】
また、2本の糸条L3,L4を搬送している際に、たとえば、糸条L3が切れた場合、糸条L3が切れたことを異常検知センサ92が検知する。異常検知センサ92は、制御装置140にその旨の信号を送信する。その信号を受信した制御装置140は、空気供給装置130に第1エアシリンダ121への空気の供給を停止する旨の信号を送信する。この信号に応じて、第1エアシリンダ121への空気の供給が停止されることにより、引張装置120の保持していた引張力2Tから、第1エアシリンダ121分の引張力Tが喪失される。従って、引張装置120の引張力は第2エアシリンダ122のみの引張力Tとなり、第2エアシリンダ122の引張力Tのみがローラ群110に作用される。
【0067】
上記のように、切れずに残った糸条L4には、ローラ群110を介して第2エアシリンダ122の引張力Tのみに基づくテンションを付与することができる。従って、いずれかの糸条が切れるなどの異常が生じた場合、並列的に配置された2本の第1エアシリンダ121および第2エアシリンダ122のうち、少なくとも一つのエアシリンダの引張力Tを喪失させるため、ローラ群110に作用する引張力も喪失されて、残りの糸条に対するテンションを一定にすることができる。
【0068】
以上より、通常時および異常時のいずれにおいても、各糸条に均等なテンションを付与し続けることができるため、2本の糸条L3,L4を安定して巻き取ることが可能となる。
【0069】
なお、上記の実施形態において、引張部材として空気圧を利用したエアシリンダを用いる場合について説明したが、これに限ることなく、油圧を利用する油圧シリンダを用いてもよい。
【0070】
また、2本の糸条を巻き取る場合について説明したが、これに限ることなく、3本以上でもよい。なお、このとき、巻き取る糸条の数に対応させてバネ部材あるいはエアシリンダなどの数を増やす。
【0071】
また、複数のバネ部材またはエアシリンダのうちの少なくとも一つのバネ部材の引張力またはエアシリンダの引張力を喪失させる場合について説明したが、これに限ることなく、必要に応じた分だけの引張力を減少させるようにしてもよい。
【0072】
以上、図面を参照してこの発明の実施形態を説明したが、この発明は、図示した実施形態のものに限定されない。図示された実施形態に対して、この発明と同一の範囲内において、あるいは均等の範囲内において、種々の修正や変形を加えることが可能である。
【符号の説明】
【0073】
1、101…張力付与装置
10、110…ローラ群
110a…固定ローラ群
110b…移動ローラ群
11、111…第1ローラ
12、112…第2ローラ
13、113…第3ローラ
14、114…第4ローラ
115…第5ローラ
116…第6ローラ
117…第7ローラ
20、120…引張装置
21…第1バネ部材
22…第2バネ部材
30…回転部材
32…回転レバー
40…回転規制装置
91、92…異常検知センサ
102…固定支持アーム
103…回転伝達ボックス
104…回動支持アーム
105…回転リンク部材
121…第1エアシリンダ
122…第2エアシリンダ
【特許請求の範囲】
【請求項1】
複数本の糸条部材を個別に巻き取る巻糸装置であって、
各糸条部材にそれぞれテンションを付与する複数のローラからなるローラ群と、
並列的に配置され、前記ローラ群に引張力を作用させる複数の引張部材と、
各糸条部材の異常を検知する異常検知センサとを備え、
前記異常検知センサにより糸条部材の異常が検知された場合、少なくとも一つの前記引張部材の引張力を喪失または減少させることを特徴とする巻糸装置。
【請求項2】
少なくとも一つの前記引張部材に連結され、該引張部材の引張力に抗して回転可能な回転部材と、
前記回転部材の回転を規制する回転規制装置とを備え、
通常の場合、前記回転規制装置により前記回転部材の回転を所定位置で規制することによって前記引張部材に引張力を生じさせる一方、前記異常検知センサにより糸条部材の異常が検知された場合、前記回転規制装置による前記回転部材の回転の規制を解除することにより、当該回転部材に連結された前記引張部材の引張力を喪失または減少させる請求項1に記載の巻糸装置。
【請求項3】
前記引張部材はバネ部材である請求項1または請求項2に記載の巻糸装置。
【請求項4】
前記ローラ群は固定ローラ及び移動ローラからなり、
前記引張部材の引張力に基づいて、前記移動ローラを前記固定ローラに対して離間方向に移動させることにより各糸条部材にテンションを付与する請求項1に記載の巻糸装置。
【請求項5】
前記移動ローラを前記固定ローラに対して離間方向に回動させる回動機構を備える請求項4に記載の巻糸装置。
【請求項6】
前記引張部材は空気が供給されることにより引張力を作用させるエアシリンダである請求項4または請求項5に記載の巻糸装置。
【請求項1】
複数本の糸条部材を個別に巻き取る巻糸装置であって、
各糸条部材にそれぞれテンションを付与する複数のローラからなるローラ群と、
並列的に配置され、前記ローラ群に引張力を作用させる複数の引張部材と、
各糸条部材の異常を検知する異常検知センサとを備え、
前記異常検知センサにより糸条部材の異常が検知された場合、少なくとも一つの前記引張部材の引張力を喪失または減少させることを特徴とする巻糸装置。
【請求項2】
少なくとも一つの前記引張部材に連結され、該引張部材の引張力に抗して回転可能な回転部材と、
前記回転部材の回転を規制する回転規制装置とを備え、
通常の場合、前記回転規制装置により前記回転部材の回転を所定位置で規制することによって前記引張部材に引張力を生じさせる一方、前記異常検知センサにより糸条部材の異常が検知された場合、前記回転規制装置による前記回転部材の回転の規制を解除することにより、当該回転部材に連結された前記引張部材の引張力を喪失または減少させる請求項1に記載の巻糸装置。
【請求項3】
前記引張部材はバネ部材である請求項1または請求項2に記載の巻糸装置。
【請求項4】
前記ローラ群は固定ローラ及び移動ローラからなり、
前記引張部材の引張力に基づいて、前記移動ローラを前記固定ローラに対して離間方向に移動させることにより各糸条部材にテンションを付与する請求項1に記載の巻糸装置。
【請求項5】
前記移動ローラを前記固定ローラに対して離間方向に回動させる回動機構を備える請求項4に記載の巻糸装置。
【請求項6】
前記引張部材は空気が供給されることにより引張力を作用させるエアシリンダである請求項4または請求項5に記載の巻糸装置。
【図1】


【図2】

【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】

【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2012−126569(P2012−126569A)
【公開日】平成24年7月5日(2012.7.5)
【国際特許分類】
【出願番号】特願2011−9494(P2011−9494)
【出願日】平成23年1月20日(2011.1.20)
【出願人】(000146984)株式会社神津製作所 (8)
【Fターム(参考)】
【公開日】平成24年7月5日(2012.7.5)
【国際特許分類】
【出願日】平成23年1月20日(2011.1.20)
【出願人】(000146984)株式会社神津製作所 (8)
【Fターム(参考)】
[ Back to top ]