
Fターム[3F111CA20]の内容
線条材料の張力調整 (1,009) | 走行線条材への張力付与、調整 (118) | フローティングエレメント (63) | 張力フィードバック信号を発生するもの (21) | 電気的 (16)
Fターム[3F111CA20]に分類される特許
1 - 16 / 16
線状体貯線装置
【課題】巻取機による線状体の巻取速度の変化に応じて線状体貯線装置の出側における線状体の張力、ひいては線状体貯線装置の出側及び入側における線状体の張力をそれぞれ一定に保つことができる線状体貯線装置を提供すること。
【解決手段】線状体貯線装置10は、回転駆動される固定シーブ支持軸13に軸受を介して回転自在に支持された固定シーブ14と、固定軸18に軸受を介して回転自在に支持されるとともに、前記固定シーブ14に対して近接・離隔自在に設けられた移動シーブ19と、前記移動シーブ19を前記固定シーブ14に対して離隔する方向に牽引する牽引ユニット21と、巻取機6による線状体2の巻取速度の変化に応じて前記固定シーブ14と前記巻取機6間の線状体2の張力を一定に保つように、前記巻取機6による線状体の巻取速度V2に基づいて前記固定シーブ支持軸13の回転数を制御する制御手段25〜27とを備える。
(もっと読む)
巻糸装置

【課題】簡易な構成で、各糸条部材に均等にテンションを付与し続けることができる巻糸装置を提供する。
【解決手段】2本の糸条L1,L2を個別に巻き取る巻糸装置は、各糸条L1,L2にそれぞれテンションを付与する複数のローラからなるローラ群10と、並列的に配置され、ローラ群10全体に引張力を作用させる複数のバネ部材21、22を有する引張装置20と、各糸条L1,L2の異常を検知する異常検知センサ91とを有する張力付与装置1を備える。この巻糸装置は、異常検知センサ91により糸条L1,L2の異常が検知された場合、少なくとも一つのバネ部材21又は22の引張力を喪失させる。
(もっと読む)
線条体送出装置およびその方法
【課題】小型軽量化した線条体送出装置及びその方法を提供する。
【解決手段】送出モータ7がボビン5を回転駆動することにより、線条体3がボビン5から送出される。線トラバース機構13は、ボールネジ15と、ボールネジ15を正逆両方向に回転駆動するボールネジ駆動モータ17と、ボールネジ15により左右方向へ滑動するスライダ21と、キャリア23を備える。スライダ21に接続されたキャリア23には、ガイドプーリ33,35が軸支されるとともに、位置検出器25が設けられている。ボビン5から送出された線条体3の方向は、ガイドプーリ33,35によりボビン軸方向と平行な方向へ変換される。位置検出器25は、線条体3のボビン軸方向の位置を検出し、制御装置47は、位置検出器25の検出信号によりボールネジ駆動モータ17を駆動し、ダンサプーリ39が目標位置となるように送出モータ7を駆動する。
(もっと読む)
弾性糸供給装置
【課題】オーバーエンド解舒によって引き出された弾性糸を加工ラインに供給する場合において、引き伸ばし倍率のばらつきに起因する製品の品質不良をさらに確実に抑制できる弾性糸供給装置を提供する。
【解決手段】弾性糸供給装置100は、弾性糸パッケージPから引き出された弾性糸THに作用する応力を制御するテンションコントローラ130と、テンションコントローラ130から繰り出した弾性糸THを加工ライン30に供給する駆動ロール140とを備える。駆動ロール140は、ウエブWの搬送速度v1よりも遅い供給速度v2で動作し、搬送速度v1の増減に応じて供給速度v2を増減する。
(もっと読む)
テンション装置
【課題】線速検出用エンコーダを用いることなく、線速や線材送出し長さを推定する。
【解決手段】テンションプーリと、テンションアームと、アーム角度を検出する角度検出部と、テンションプーリを回転させるモータと、角度検出部が検出したアーム角度と、入力される目標アーム角度とに応じてモータの駆動を制御して、巻線の繰り出す速度を増減させる制御部とを備えるテンション装置であって、角度検出部において検出したアーム角度信号と、モータの回転速度信号とを入力し、アーム角度信号と、回転速度信号と、テンションプーリとテンションアームの配置位置情報とに基づき巻線の線速を演算によって求めて推定線速信号を出力する線速推定部と、推定線速信号を入力し、推定線速信号を積分することにより巻線の巻取り長さを求めて推定巻取り長さ信号を出力する推定巻取り長さ推定部とをさらに備えた。
(もっと読む)
テンション装置
【課題】付勢部材の交換又は調整を行うことなく巻線に加えるテンションの変更ができるテンション装置を提供する。
【解決手段】テンション装置は、ボビンから導かれた巻線を巻線機に向かって繰り出すテンションプーリと、テンションプーリと巻線機との間で巻線を案内するアームプーリを先端に有し、基端を支点にして回動自在なテンションアームと、アームプーリがテンションプーリ及び巻線機から離間するようにテンションアームを付勢する付勢部材と、テンションアームの基端及び先端を結ぶ直線と、水平方向とのなす角度であるアーム角度を検出する角度検出部と、テンションプーリに結合され、テンションプーリを回転させるモータと、角度検出部が検出したアーム角度と、入力される目標アーム角度と応じてモータの駆動を制御して、巻線の繰り出す速度を増減させる制御部とを具備する。
(もっと読む)
線材張力調整装置
【課題】 線材引き出し速度の急激な加減速があっても、線材に作用する張力を安定させることができる線材張力調整装置を提供する。
【解決手段】 線材が巻掛けられる送り出し用プーリ21と、この送り出し用プーリ21を回転駆動して上流側にある線材を下流側へ送り出すサーボモータ22と、送り出し用プーリ21よりも下流側に配設され、下流側から引っ張られて引き出される線材の張力を検出する張力検出部50と、送り出し用プーリ21よりも下流側に配設され、下流側から引っ張られて引き出される線材の移動速度を検出する速度検出部40とを備える。そして、速度検出部40で検出された線材の移動速度に基づきサーボモータ22の回転速度を制御するとともに、張力検出部50で検出された線材の張力に基づきサーボモータ22の回転速度を補正することにより、送り出し用プーリ21から送り出された線材の張力を調整する。
(もっと読む)
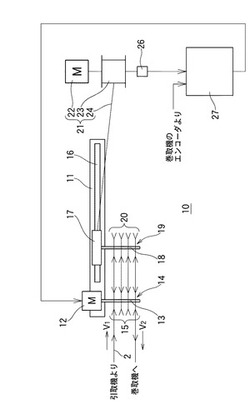
ガラスファイバーの巻取装置
【課題】 元リールに巻かれたガラスファイバーを巻取リールに巻き取る際、ガラスファイバーの張力の変動を減少させて、破断あるいは巻線解けを防止する共にガラスファイバーの性能を確保し、且つ巻取作業の人工が低減できる巻取装置を提供すること。
【解決手段】送線モータ4を有する元リール3に巻いたガラスファイバー2を固定滑車21〜25と動滑車31〜35とに係回して5段の複合動滑車ユニット100を構成し、動滑車31〜35の孔31a〜35aの各々に重り系40の自重を共通に作用させ、複合動滑車ユニット100から引き出したガラスファイバー2を巻取モータ7を有する巻取リール6で巻取る。この際、動滑車31〜35に挿入した軸39の往復動する上限位置Aと下限位置Bを上限側及び下限側リミットスイッチ41、42で検知し、検知結果に基づき制御装置60で送線モータ4及び巻取モータ7の少なくともいずれか一方を制御する。
(もっと読む)
張力調整装置
【課題】細線材の張力調整装置において低張力を精度良く調整可能な簡易な構成を提供する。
【解決手段】張力調整装置20のダンサーロール28を、支持台32上におかれた筒状スリーブ34の外周部に回転可能に軸支する。スリーブ34の内周面には、磁界発生用コイル38が同軸状に固定され、コイル38の軸心には永久磁石40が貫通されるように配置される。永久磁石40は、N極とS極の磁極が長手方向に交互に現れるように形成された棒状の磁石であり、その両端は支持台32上に形成されたストッパ42,44に固定される。この構成において、コイル38に電流を流すと磁力が発生し、これが推力となってコイル38とスリーブ34は一体として水平方向に移動し、スリーブ34に軸支されたダンサーロール28は水平方向に変位する。
(もっと読む)
線状物貯線装置
【課題】 貯線時の緩みの発生の防止。
【解決手段】 貯線装置10は、固定シーブ12と、移動シーブ14と、牽引ユニット16と、検出手段18と、制御手段20とを備えている。シーブ12は、線状物Aを入出線するようにガイドするものである。シーブ14は、シーブ12に対して、近接・離隔自在に設けられている。ユニット16は、シーブ14を、シーブ12に対して、近接・離隔する方向に牽引するものである。検出手段18は、シーブ14の移動方向および移動量を検出する。制御手段20は、シーブ14とシーブ12との間の離隔状態に応じて、線状物Aが緩まない張力状態になるように、牽引ユニット16の牽引力を制御する。
(もっと読む)
電磁式テンサーを組み込んだ糸弛み取り装置
【課題】糸掛け部材の弛み取りローラに対する安定した回転抵抗を実現し、品質の安定したパッケージを形成できるようにした電磁式テンサーを組み込んでなる糸弛み取り装置を提供すること。
【解決手段】回転駆動源25と、回転駆動源によって回転駆動される弛み取りローラ21と、弛み取りローラに対して同心で相対回転自在に取り付けられる糸掛け部材22とを備え、糸掛け部材に磁界が作用するように、電磁石による磁界形成手段を弛み取りローラに設け、磁界形成手段により生じる磁界によって、弛み取りローラと糸掛け部材との間に回転トルクを発生させ、電磁石への入力制御によって回転トルクを制御するようにしたことを特徴とする電磁式テンサーを組み込んだ糸弛み取り装置。
(もっと読む)
線条材料の巻取方法及び心線の巻取方法
【課題】線条材料の送出方向に沿って並設される一のプーリの周速度に、他のプーリの周速度を良好に追従させられる線条材料の巻取方法を提供することにある。
【解決手段】線条材料の送出方向の上流側に配置される第1ボビンから前記線条材料を引き出し、前記送出方向の下流側に配置される第2ボビンによって前記線条材料を巻き取る、線条材料の巻取方法において、上流側に引出プーリを下流側にテンションプーリを設ける。テンションプーリに第2エンコーダ12aを設け、これにより検出されるテンションプーリの回転を、引出プーリの軸部に接続される第1サーボモータ3に送信する。このようにして、テンションプーリの周速度と、引出プーリの周速度と、を揃える。
(もっと読む)
テンション装置
【課題】巻き取り側から引っ張られる線材の速度に追従させることなく、線材のテンションを一定に保つ。
【解決手段】テンション装置1は、ロープ2が巻回されたボビン3が嵌挿されたボビン軸3aを回転駆動するサーボモータ4と、ロープ2のテンションを測定するテンション測定機6と、サーボモータ4に供給される電流を制御するコントローラ10とを有している。テンション装置1では、テンション測定機6によって実テンション値を測定し、トルク制限制御にフィードバックして、ロープ2にかかるテンション値が目的のテンション値になるように制御される。
(もっと読む)
テンション装置
【課題】材料の供給元としての第1ボビンでの巻き状態や巻き径に影響されず、高精度なテンション付与を可能としたテンション装置を提供する。
【解決手段】第1ボビン1から引き出され第2ボビン10によって巻き取られる材料Yに適宜のテンションを付与するためのテンション装置は、材料引出部Aと材料巻取部Bとを備える。材料引出部Aは第1ボビン1と引出プーリ2とを備える。材料巻取部Bは第2ボビン10とテンションプーリ11とを備える。材料引出部Aと材料巻取部Bとを連接するための前記材料接続部Mにおいて材料Y上にはダンサー20が載置されている。
(もっと読む)
糸の巻取方法及び装置
給糸体から接線方法に解舒した糸を巻取る方法及び装置に関する。糸の高速巻取を実現しようとする際に、給糸体の回転数が上がることに起因する大きな張力変動が生じ、糸の損傷や糸切れが発生する。この発明により、高速でかつ糸の損傷や切断を生じない分織機や仮撚機を実現することができる。この発明の方法及び装置では、給糸体の回転数が所定の速度、即ち解舒される糸の張力に大きな変動を生ずるような回転数に達するまでは糸速一定制御で糸を巻き取り、給糸体の回転数が前記所定の回転数に達した後は、給糸体の回転数が一定となるように巻取軸の回転を制御する。 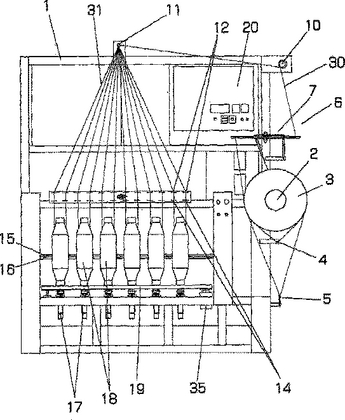 (もっと読む)
(もっと読む)
平行な繊維を所要の等しい張力状態にする取り扱い方法および構造
本発明は、異なる供給ポイントからの個々に不揃いの送出力を有する、平行な繊維またはヤーン(12)を、互いに等しい張力にする取り扱い方法および構造に関する。本発明は、以下の3つの処理ステップからなる:個々の任意の張力レベルから張力レベル零にまで繊維(12)の張力を減少させるステップ、予め設定された既知の速度でスリップロックユニットを通過させる滑りの無い繊維の送りステップ、及び、張力レベル零から所要の集積された張力レベルにまで、各々のそして全ての繊維の張力を高めるステップ。  (もっと読む)
(もっと読む)
1 - 16 / 16
[ Back to top ]