
搬送装置及びシミュレータ装置

【課題】太陽電池モジュールの出力特性の測定誤差を低減できる搬送装置及びシミュレータ装置を得ること。
【解決手段】搬送装置は、太陽電池モジュールを搬送する搬送装置であって、前記太陽電池モジュールの受光面がソーラーシミュレータの本体と対向する位置へ前記太陽電池モジュールを搬送する搬送ベルトと、前記ソーラーシミュレータの本体に対して前記太陽電池モジュールの側に配され、前記搬送ベルトを搬送方向へ案内する往路ガイド部材と、前記ソーラーシミュレータの本体に対して前記太陽電池モジュールと反対側に配され、前記往路ガイド部材により案内された前記搬送ベルトを前記搬送方向と反対方向へ案内する復路ガイド部材とを備えている。
【解決手段】搬送装置は、太陽電池モジュールを搬送する搬送装置であって、前記太陽電池モジュールの受光面がソーラーシミュレータの本体と対向する位置へ前記太陽電池モジュールを搬送する搬送ベルトと、前記ソーラーシミュレータの本体に対して前記太陽電池モジュールの側に配され、前記搬送ベルトを搬送方向へ案内する往路ガイド部材と、前記ソーラーシミュレータの本体に対して前記太陽電池モジュールと反対側に配され、前記往路ガイド部材により案内された前記搬送ベルトを前記搬送方向と反対方向へ案内する復路ガイド部材とを備えている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、搬送装置及びシミュレータ装置に関する。
【背景技術】
【0002】
太陽電池モジュールの出力特性を測定するソーラーシミュレータ上へ太陽電池モジュールを搬送する搬送装置は、太陽電池モジュールの2長辺側の2つの端部を2つの搬送ベルトで支持してソーラーシミュレータ上の指定位置で停止させる。この搬送装置は、搬送ベルトを太陽電池モジュールの搬送方向へ送る往路部と搬送ベルトを戻入する復路部との二段構造を有する。
【発明の概要】
【発明が解決しようとする課題】
【0003】
ソーラーシミュレータは、太陽電池モジュールの受光面に疑似太陽光を照射して、太陽電池モジュールの出力特性(例えば、発電特性)を測定する。照射すべき疑似太陽光は、太陽電池モジュールに対して遮光されることなく当てる必要がある。搬送装置は、搬送ベルトを巡回させる構造で、太陽電池モジュールを載せてソーラーシミュレータ上に搬送するように搬送ベルトを送る往路部と、搬送ベルトを戻す復路部とを有する。この往復の構造(往路部、復路部)が、ソーラーシミュレータの上方に設置されて、太陽電池モジュールの搬送を行う。すなわち、搬送装置では、往路部とソーラーシミュレータとの間に復路部が設置されるので、ソーラーシミュレータから照射された疑似太陽光が復路部により一部遮光されることがある。この遮光が、太陽電池モジュールの出力特性の測定において、測定誤差を生じさせる可能性がある。
【0004】
本発明は、上記に鑑みてなされたものであって、太陽電池モジュールの出力特性の測定誤差を低減できる搬送装置及びシミュレータ装置を得ることを目的とする。
【課題を解決するための手段】
【0005】
上述した課題を解決し、目的を達成するために、本発明の1つの側面にかかる搬送装置は、太陽電池モジュールを搬送する搬送装置であって、前記太陽電池モジュールの受光面がソーラーシミュレータの本体と対向する位置へ前記太陽電池モジュールを搬送する搬送ベルトと、前記ソーラーシミュレータの本体に対して前記太陽電池モジュールの側に配され、前記搬送ベルトを搬送方向へ案内する往路ガイド部材と、前記ソーラーシミュレータの本体に対して前記太陽電池モジュールと反対側に配され、前記往路ガイド部材により案内された前記搬送ベルトを前記搬送方向と反対方向へ案内する復路ガイド部材とを備えたことを特徴とする。
【発明の効果】
【0006】
本発明によれば、ソーラーシミュレータから照射された疑似太陽光を復路ガイドが遮光しないので、太陽電池モジュールへの斜め入射光の光路が遮られにくい。この結果、斜め入射光を太陽電池モジュールで受光されるようにすることができるので、太陽電池モジュールの出力特性の測定誤差を低減できる。
【図面の簡単な説明】
【0007】
【図1】図1は、実施の形態における太陽電池モジュールの構成を示す図である。
【図2】図2は、実施の形態における太陽電池モジュールの構成を示す図である。
【図3】図3は、実施の形態におけるソーラーシミュレータの構成を示す図である。
【図4】図4は、実施の形態におけるソーラーシミュレータの構成を示す図である。
【図5】図5は、実施の形態にかかる搬送装置の構成を示す図である。
【図6】図6は、実施の形態にかかる搬送装置の構成を示す図である。
【図7】図7は、実施の形態にかかる搬送装置の構成を示す図である。
【図8】図8は、比較例にかかる搬送装置の構成を示す図である。
【図9】図9は、比較例にかかる搬送装置の構成を示す図である。
【図10】図10は、比較例にかかる搬送装置の構成を示す図である。
【発明を実施するための形態】
【0008】
以下に、本発明にかかる搬送装置の実施の形態を図面に基づいて詳細に説明する。なお、本発明は以下の記述に限定されるものではなく本発明に要旨を逸脱しない範囲において適時変更可能である。また、以下に示す図面においては、理解の容易のため、各部材の尺度が実際とは異なる場合がある。
【0009】
実施の形態.
実施の形態にかかる搬送装置200について説明する。
【0010】
搬送装置200は、ソーラーシミュレータ100により測定されるべき太陽電池モジュールMをソーラーシミュレータ100の上方へ搬送する(図5〜図7参照)。ソーラーシミュレータ100は、太陽電池モジュールMの受光面に疑似太陽光を照射して、太陽電池モジュールMの出力特性(例えば、発電特性)を測定する(図3参照)。ソーラーシミュレータ100は、例えば、太陽電池モジュールMのI−V特性を測定するIVシミュレータである。なお、搬送装置200及びソーラーシミュレータ100を含む構成をシミュレータ装置300と呼ぶことにする(図5参照)。
【0011】
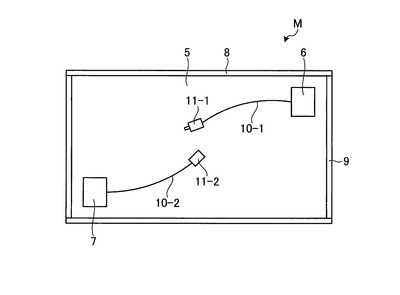
まず、ソーラーシミュレータ100により測定されるべき太陽電池モジュールMの構成について、図1及び図2を用いて説明する。図1は、太陽電池モジュールMを受光面側から見た平面図である。図2は、太陽電池モジュールMを裏面側から見た背面図である。
【0012】
太陽電池モジュールMでは、複数の太陽電池素子1−1〜1−kが2次元的に配列されているとともに例えば電気的に直列に接続されている。太陽電池素子1−1の裏面電極と、太陽電池素子1−1に隣接する太陽電池素子1−2の表面電極(受光面側の電極)とは、それぞれ、導線2に半田付けされている。このようにして、太陽電池素子1を10枚1列に一端側へ配列して並べて、列の一端の太陽電池素子1と次の列の一端の太陽電池素子1とをそれぞれ接続導線3に半田付けして接続していき、複数の太陽電池素子1−1〜1−kのストリングを形成し、そのストリングをガラスパネル4に配置する。ガラスパネル4に配置された各太陽電池素子1は、背面から封止樹脂フィルム5で密閉する。このとき、ストリングの両端の出力用導線を封止樹脂フィルム5から出しておき、それぞれ、+側出力端子ボックス6及び−側出力端子ボックス7と半田付け接続を行う。その後に、2つの長辺フレーム8と2つの短辺フレーム9とを取付けて固定する。太陽電池モジュールMの出力電力は、出力ケーブル10−1、10−2及びその出力端子11−1、11−2を介して取り出し得る。
【0013】
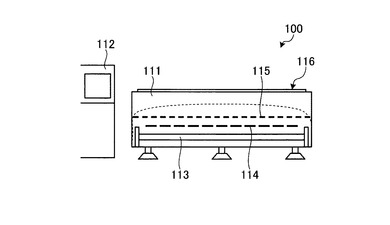
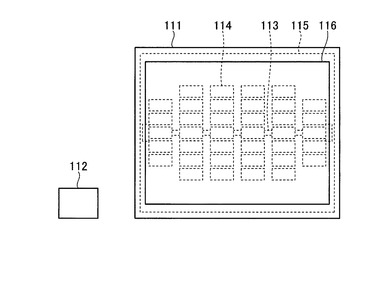
次に、ソーラーシミュレータ100の構成について図3及び図4を用いて説明する。図3は、ソーラーシミュレータ100を側面側から見た側面図である。図4は、ソーラーシミュレータ100を上方から見た平面図である。
【0014】
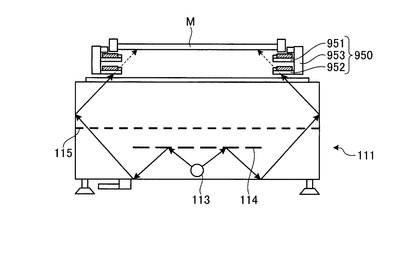
ソーラーシミュレータ100は、シミュレータ本体111と測定器112とを有する。シミュレータ本体111は、その照射面116から疑似太陽光を測定対象に向けて、すなわち太陽電池モジュールMの受光面に向けて照射する。測定器112は、太陽電池モジュールMの受光面に疑似太陽光が照射された状態で、太陽電池モジュールMの出力ケーブル10−1、10−2及びその出力端子11−1、11−2を介して、太陽電池モジュールMの出力特性を測定する。
【0015】
具体的には、シミュレータ本体111は、その内部に、ランプ113、複数の反射板114、及びフィルタ115が配されている。ランプ113は、複数の反射板114に対して照射面116の反対側に配され、例えば円筒状の形状を有している。複数の反射板114は、平面視において、例えばランプ113のほぼ全部を覆うように2次元的に配列されている。フィルタ115は、照射面116と複数の反射板114との間に配され、平面視において、ランプ113及び複数の反射板114を覆うように配されている。
【0016】
ランプ113は、疑似太陽光を発生させて反射板114へ照射する。反射板114は、照射された疑似太陽光を拡散させてフィルタ115へ導く。フィルタ115は、導かれた疑似太陽光の波長成分が太陽光の波長成分に近くなるように調整するとともに、調整後の疑似太陽光を照射面116へ導く。
【0017】
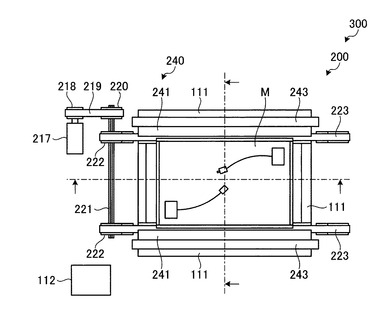
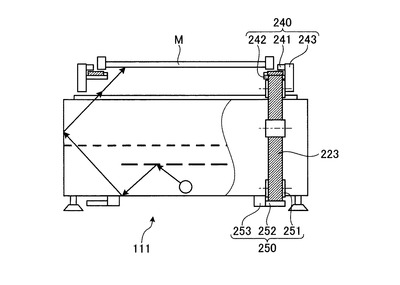
次に、搬送装置200の構成について図5〜図7を用いて説明する。図5は、シミュレータ本体111の上方に太陽電池モジュールMが搬送されるように設置された状態の搬送装置200を上方から見た平面図である。図6は、搬送装置200を図5の2点鎖線で示す方向できった場合の断面を矢印方向から見た断面図である。図7は、搬送装置200を図5の1点鎖線で示す方向できった場合の断面を矢印方向から見た断面図である。なお、図6では、シミュレータ本体111の内部構成の図示が省略されている。
【0018】
搬送装置200は、モーター217、モータープーリー218、駆動ベルト219、駆動プーリー220、ボールスプライン221、搬送ベルト223、搬送プーリー222−1、222−2、テンションプーリー225、復路プーリー226−1、226−2、搬送ベルト往路ガイド240、及び搬送ベルト復路ガイド250を備える。
【0019】
モーター217の回転運動の動力は、モータープーリー218及び駆動ベルト219を介して駆動プーリー220に伝達される。駆動プーリー220は、伝達された動力を、ボールスプライン221を介して搬送プーリー222−1に伝達する。搬送プーリー222−1は、伝達された動力を用いて、搬送ベルト223を移動させて太陽電池モジュールMを搬送する。このとき、太陽電池モジュールMは、シミュレータ本体111の側(例えば下側)が受光面となるように、太陽電池モジュールMの2長辺側の2つの端部を2つの搬送ベルト223で支持されている。
【0020】
搬送ベルト223は、リング状のベルトである。搬送ベルト223は、例えば、搬送プーリー222−1、搬送プーリー222−2、テンションプーリー225、復路プーリー226−2、復路プーリー226−1、からなる経路をとおり一巡する。このとき、搬送ベルト223は、搬送ベルト往路ガイド240及び搬送ベルト復路ガイド250によって規制された経路を通過する。
【0021】
すなわち、搬送ベルト往路ガイド240は、搬送プーリー222−1及び搬送プーリー222−2の間において、搬送ベルト223を搬送方向へ案内する。具体的には、搬送ベルト往路ガイド240は、上部ガイド241、下部ガイド242、及び側部ガイド(搬送装置フレーム)243を有する。すなわち、側部ガイド243により搬送時における搬送ベルト223の水平位置を規制しながら、上部ガイド241及び下部ガイド242の間に搬送ベルト223を通すことで搬送時における搬送ベルト223の鉛直位置を規制する。
【0022】
また、搬送ベルト復路ガイド250は、搬送ベルト往路ガイド240により案内された搬送ベルト223を、復路プーリー226−2及び復路プーリー226−1の間において、搬送方向と反対方向へ戻入するように案内する。具体的には、搬送ベルト復路ガイド250は、上部ガイド251、下部ガイド252、及び側部ガイド253を有する。すなわち、側部ガイド253により戻入時における搬送ベルト223の水平位置を規制しながら、上部ガイド251及び下部ガイド252の間に搬送ベルト223を通すことで戻入時における搬送ベルト223の鉛直位置を規制する。なお、図6では、図面を分かりやすくする便宜上、側部ガイド253の図示が省略されている。
【0023】
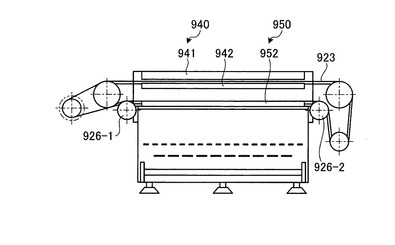
ここで、仮に、図8及び図9に示すように、搬送ベルト往路ガイド940及び搬送ベルト復路ガイド950をいずれもシミュレータ本体111に対して照射面116側、すなわち太陽電池モジュールMの側に設けた場合について考える。この場合、搬送ベルト復路ガイド950は、搬送ベルト往路ガイド940とシミュレータ本体111との間に位置することになる。すなわち、搬送ベルト往路ガイド940の上部ガイド941、下部ガイド942、及び側部ガイド(搬送装置フレーム)943は、搬送ベルト923を搬送方向へ案内する。搬送ベルト復路ガイド950の上部ガイド951、下部ガイド952、及び側部ガイド(搬送装置フレーム)953は、搬送ベルト往路ガイド940により案内された搬送ベルト923を、搬送ベルト往路ガイド940とシミュレータ本体111との間において、搬送方向と反対方向へ戻入するように案内する。
【0024】
この構成では、図10に示すように、シミュレータ本体111から照射された疑似太陽光が搬送ベルト復路ガイド950によって遮光されることがある。具体的には、ランプ113から発光され反射板114で拡散されフィルタ115を介しシミュレータ本体111のケーシング内側面で反射された疑似太陽光は、太陽電池モジュールMに対して斜め方向からも入射する。この斜め入射光に対して、搬送ベルト復路ガイド950の下部ガイド952が光路を遮る傾向にある。この遮光が、太陽電池モジュールMの出力特性の測定において、測定誤差を生じさせる可能性がある。
【0025】
それに対して、実施の形態では、搬送装置200の復路プーリー226−2、226−1が、比較例における復路プーリー926−2、926−1(図9参照)に比べて、シミュレータ本体111の低いところに位置している。そして、搬送ベルト復路ガイド250は、シミュレータ本体111の底部に取り付けられており、搬送ベルト223の復路経路がシミュレータ本体111の底部を通る構造になっている。すなわち、搬送ベルト往路ガイド240がシミュレータ本体111に対して太陽電池モジュールMの側に配されているとともに、搬送ベルト復路ガイド250がシミュレータ本体111に対して太陽電池モジュールMの反対側に配されている。これにより、ソーラーシミュレータ100から照射された疑似太陽光を遮光する構造部分を無くすことができる。すなわち、ソーラーシミュレータ100から照射された疑似太陽光を搬送ベルト復路ガイド250が遮光しないので、太陽電池モジュールMへの斜め入射光の光路が遮られにくい。この結果、斜め入射光を太陽電池モジュールMで受光されるようにすることができるので、太陽電池モジュールMの出力特性の測定誤差を低減できる。
【産業上の利用可能性】
【0026】
以上のように、本発明にかかる搬送装置は、太陽電池モジュールの搬送に有用である。
【符号の説明】
【0027】
1 太陽電池素子
2 導線
3 接続導線
4 ガラスパネル
5 封止樹脂フィルム
6 +側出力端子ボックス
7 −側出力端子ボックス
8 長辺フレーム
9 短辺フレーム
10 出力ケーブル
11 出力端子
100 ソーラーシミュレータ
111 シミュレータ本体
112 測定器
113 ランプ
114 反射板
115 フィルタ
116 照射面
200 搬送装置
217 モーター
218 モータープーリー
219 駆動ベルト
220 駆動プーリー
221 ボールスプライン
222−1、222−2 搬送プーリー
223 搬送ベルト
225 テンションプーリー
226−1、226−2 復路プーリー
240 搬送ベルト往路ガイド
241 上部ガイド
242 下部ガイド
243 側部ガイド
250 搬送ベルト復路ガイド
251 上部ガイド
252 下部ガイド
253 側部ガイド
300 シミュレータ装置
923 搬送ベルト
926 復路プーリー
940 搬送ベルト往路ガイド
941 上部ガイド
942 下部ガイド
943 側部ガイド
950 搬送ベルト復路ガイド
951 上部ガイド
952 下部ガイド
953 側部ガイド
M 太陽電池モジュール
【技術分野】
【0001】
本発明は、搬送装置及びシミュレータ装置に関する。
【背景技術】
【0002】
太陽電池モジュールの出力特性を測定するソーラーシミュレータ上へ太陽電池モジュールを搬送する搬送装置は、太陽電池モジュールの2長辺側の2つの端部を2つの搬送ベルトで支持してソーラーシミュレータ上の指定位置で停止させる。この搬送装置は、搬送ベルトを太陽電池モジュールの搬送方向へ送る往路部と搬送ベルトを戻入する復路部との二段構造を有する。
【発明の概要】
【発明が解決しようとする課題】
【0003】
ソーラーシミュレータは、太陽電池モジュールの受光面に疑似太陽光を照射して、太陽電池モジュールの出力特性(例えば、発電特性)を測定する。照射すべき疑似太陽光は、太陽電池モジュールに対して遮光されることなく当てる必要がある。搬送装置は、搬送ベルトを巡回させる構造で、太陽電池モジュールを載せてソーラーシミュレータ上に搬送するように搬送ベルトを送る往路部と、搬送ベルトを戻す復路部とを有する。この往復の構造(往路部、復路部)が、ソーラーシミュレータの上方に設置されて、太陽電池モジュールの搬送を行う。すなわち、搬送装置では、往路部とソーラーシミュレータとの間に復路部が設置されるので、ソーラーシミュレータから照射された疑似太陽光が復路部により一部遮光されることがある。この遮光が、太陽電池モジュールの出力特性の測定において、測定誤差を生じさせる可能性がある。
【0004】
本発明は、上記に鑑みてなされたものであって、太陽電池モジュールの出力特性の測定誤差を低減できる搬送装置及びシミュレータ装置を得ることを目的とする。
【課題を解決するための手段】
【0005】
上述した課題を解決し、目的を達成するために、本発明の1つの側面にかかる搬送装置は、太陽電池モジュールを搬送する搬送装置であって、前記太陽電池モジュールの受光面がソーラーシミュレータの本体と対向する位置へ前記太陽電池モジュールを搬送する搬送ベルトと、前記ソーラーシミュレータの本体に対して前記太陽電池モジュールの側に配され、前記搬送ベルトを搬送方向へ案内する往路ガイド部材と、前記ソーラーシミュレータの本体に対して前記太陽電池モジュールと反対側に配され、前記往路ガイド部材により案内された前記搬送ベルトを前記搬送方向と反対方向へ案内する復路ガイド部材とを備えたことを特徴とする。
【発明の効果】
【0006】
本発明によれば、ソーラーシミュレータから照射された疑似太陽光を復路ガイドが遮光しないので、太陽電池モジュールへの斜め入射光の光路が遮られにくい。この結果、斜め入射光を太陽電池モジュールで受光されるようにすることができるので、太陽電池モジュールの出力特性の測定誤差を低減できる。
【図面の簡単な説明】
【0007】
【図1】図1は、実施の形態における太陽電池モジュールの構成を示す図である。
【図2】図2は、実施の形態における太陽電池モジュールの構成を示す図である。
【図3】図3は、実施の形態におけるソーラーシミュレータの構成を示す図である。
【図4】図4は、実施の形態におけるソーラーシミュレータの構成を示す図である。
【図5】図5は、実施の形態にかかる搬送装置の構成を示す図である。
【図6】図6は、実施の形態にかかる搬送装置の構成を示す図である。
【図7】図7は、実施の形態にかかる搬送装置の構成を示す図である。
【図8】図8は、比較例にかかる搬送装置の構成を示す図である。
【図9】図9は、比較例にかかる搬送装置の構成を示す図である。
【図10】図10は、比較例にかかる搬送装置の構成を示す図である。
【発明を実施するための形態】
【0008】
以下に、本発明にかかる搬送装置の実施の形態を図面に基づいて詳細に説明する。なお、本発明は以下の記述に限定されるものではなく本発明に要旨を逸脱しない範囲において適時変更可能である。また、以下に示す図面においては、理解の容易のため、各部材の尺度が実際とは異なる場合がある。
【0009】
実施の形態.
実施の形態にかかる搬送装置200について説明する。
【0010】
搬送装置200は、ソーラーシミュレータ100により測定されるべき太陽電池モジュールMをソーラーシミュレータ100の上方へ搬送する(図5〜図7参照)。ソーラーシミュレータ100は、太陽電池モジュールMの受光面に疑似太陽光を照射して、太陽電池モジュールMの出力特性(例えば、発電特性)を測定する(図3参照)。ソーラーシミュレータ100は、例えば、太陽電池モジュールMのI−V特性を測定するIVシミュレータである。なお、搬送装置200及びソーラーシミュレータ100を含む構成をシミュレータ装置300と呼ぶことにする(図5参照)。
【0011】
まず、ソーラーシミュレータ100により測定されるべき太陽電池モジュールMの構成について、図1及び図2を用いて説明する。図1は、太陽電池モジュールMを受光面側から見た平面図である。図2は、太陽電池モジュールMを裏面側から見た背面図である。
【0012】
太陽電池モジュールMでは、複数の太陽電池素子1−1〜1−kが2次元的に配列されているとともに例えば電気的に直列に接続されている。太陽電池素子1−1の裏面電極と、太陽電池素子1−1に隣接する太陽電池素子1−2の表面電極(受光面側の電極)とは、それぞれ、導線2に半田付けされている。このようにして、太陽電池素子1を10枚1列に一端側へ配列して並べて、列の一端の太陽電池素子1と次の列の一端の太陽電池素子1とをそれぞれ接続導線3に半田付けして接続していき、複数の太陽電池素子1−1〜1−kのストリングを形成し、そのストリングをガラスパネル4に配置する。ガラスパネル4に配置された各太陽電池素子1は、背面から封止樹脂フィルム5で密閉する。このとき、ストリングの両端の出力用導線を封止樹脂フィルム5から出しておき、それぞれ、+側出力端子ボックス6及び−側出力端子ボックス7と半田付け接続を行う。その後に、2つの長辺フレーム8と2つの短辺フレーム9とを取付けて固定する。太陽電池モジュールMの出力電力は、出力ケーブル10−1、10−2及びその出力端子11−1、11−2を介して取り出し得る。
【0013】
次に、ソーラーシミュレータ100の構成について図3及び図4を用いて説明する。図3は、ソーラーシミュレータ100を側面側から見た側面図である。図4は、ソーラーシミュレータ100を上方から見た平面図である。
【0014】
ソーラーシミュレータ100は、シミュレータ本体111と測定器112とを有する。シミュレータ本体111は、その照射面116から疑似太陽光を測定対象に向けて、すなわち太陽電池モジュールMの受光面に向けて照射する。測定器112は、太陽電池モジュールMの受光面に疑似太陽光が照射された状態で、太陽電池モジュールMの出力ケーブル10−1、10−2及びその出力端子11−1、11−2を介して、太陽電池モジュールMの出力特性を測定する。
【0015】
具体的には、シミュレータ本体111は、その内部に、ランプ113、複数の反射板114、及びフィルタ115が配されている。ランプ113は、複数の反射板114に対して照射面116の反対側に配され、例えば円筒状の形状を有している。複数の反射板114は、平面視において、例えばランプ113のほぼ全部を覆うように2次元的に配列されている。フィルタ115は、照射面116と複数の反射板114との間に配され、平面視において、ランプ113及び複数の反射板114を覆うように配されている。
【0016】
ランプ113は、疑似太陽光を発生させて反射板114へ照射する。反射板114は、照射された疑似太陽光を拡散させてフィルタ115へ導く。フィルタ115は、導かれた疑似太陽光の波長成分が太陽光の波長成分に近くなるように調整するとともに、調整後の疑似太陽光を照射面116へ導く。
【0017】
次に、搬送装置200の構成について図5〜図7を用いて説明する。図5は、シミュレータ本体111の上方に太陽電池モジュールMが搬送されるように設置された状態の搬送装置200を上方から見た平面図である。図6は、搬送装置200を図5の2点鎖線で示す方向できった場合の断面を矢印方向から見た断面図である。図7は、搬送装置200を図5の1点鎖線で示す方向できった場合の断面を矢印方向から見た断面図である。なお、図6では、シミュレータ本体111の内部構成の図示が省略されている。
【0018】
搬送装置200は、モーター217、モータープーリー218、駆動ベルト219、駆動プーリー220、ボールスプライン221、搬送ベルト223、搬送プーリー222−1、222−2、テンションプーリー225、復路プーリー226−1、226−2、搬送ベルト往路ガイド240、及び搬送ベルト復路ガイド250を備える。
【0019】
モーター217の回転運動の動力は、モータープーリー218及び駆動ベルト219を介して駆動プーリー220に伝達される。駆動プーリー220は、伝達された動力を、ボールスプライン221を介して搬送プーリー222−1に伝達する。搬送プーリー222−1は、伝達された動力を用いて、搬送ベルト223を移動させて太陽電池モジュールMを搬送する。このとき、太陽電池モジュールMは、シミュレータ本体111の側(例えば下側)が受光面となるように、太陽電池モジュールMの2長辺側の2つの端部を2つの搬送ベルト223で支持されている。
【0020】
搬送ベルト223は、リング状のベルトである。搬送ベルト223は、例えば、搬送プーリー222−1、搬送プーリー222−2、テンションプーリー225、復路プーリー226−2、復路プーリー226−1、からなる経路をとおり一巡する。このとき、搬送ベルト223は、搬送ベルト往路ガイド240及び搬送ベルト復路ガイド250によって規制された経路を通過する。
【0021】
すなわち、搬送ベルト往路ガイド240は、搬送プーリー222−1及び搬送プーリー222−2の間において、搬送ベルト223を搬送方向へ案内する。具体的には、搬送ベルト往路ガイド240は、上部ガイド241、下部ガイド242、及び側部ガイド(搬送装置フレーム)243を有する。すなわち、側部ガイド243により搬送時における搬送ベルト223の水平位置を規制しながら、上部ガイド241及び下部ガイド242の間に搬送ベルト223を通すことで搬送時における搬送ベルト223の鉛直位置を規制する。
【0022】
また、搬送ベルト復路ガイド250は、搬送ベルト往路ガイド240により案内された搬送ベルト223を、復路プーリー226−2及び復路プーリー226−1の間において、搬送方向と反対方向へ戻入するように案内する。具体的には、搬送ベルト復路ガイド250は、上部ガイド251、下部ガイド252、及び側部ガイド253を有する。すなわち、側部ガイド253により戻入時における搬送ベルト223の水平位置を規制しながら、上部ガイド251及び下部ガイド252の間に搬送ベルト223を通すことで戻入時における搬送ベルト223の鉛直位置を規制する。なお、図6では、図面を分かりやすくする便宜上、側部ガイド253の図示が省略されている。
【0023】
ここで、仮に、図8及び図9に示すように、搬送ベルト往路ガイド940及び搬送ベルト復路ガイド950をいずれもシミュレータ本体111に対して照射面116側、すなわち太陽電池モジュールMの側に設けた場合について考える。この場合、搬送ベルト復路ガイド950は、搬送ベルト往路ガイド940とシミュレータ本体111との間に位置することになる。すなわち、搬送ベルト往路ガイド940の上部ガイド941、下部ガイド942、及び側部ガイド(搬送装置フレーム)943は、搬送ベルト923を搬送方向へ案内する。搬送ベルト復路ガイド950の上部ガイド951、下部ガイド952、及び側部ガイド(搬送装置フレーム)953は、搬送ベルト往路ガイド940により案内された搬送ベルト923を、搬送ベルト往路ガイド940とシミュレータ本体111との間において、搬送方向と反対方向へ戻入するように案内する。
【0024】
この構成では、図10に示すように、シミュレータ本体111から照射された疑似太陽光が搬送ベルト復路ガイド950によって遮光されることがある。具体的には、ランプ113から発光され反射板114で拡散されフィルタ115を介しシミュレータ本体111のケーシング内側面で反射された疑似太陽光は、太陽電池モジュールMに対して斜め方向からも入射する。この斜め入射光に対して、搬送ベルト復路ガイド950の下部ガイド952が光路を遮る傾向にある。この遮光が、太陽電池モジュールMの出力特性の測定において、測定誤差を生じさせる可能性がある。
【0025】
それに対して、実施の形態では、搬送装置200の復路プーリー226−2、226−1が、比較例における復路プーリー926−2、926−1(図9参照)に比べて、シミュレータ本体111の低いところに位置している。そして、搬送ベルト復路ガイド250は、シミュレータ本体111の底部に取り付けられており、搬送ベルト223の復路経路がシミュレータ本体111の底部を通る構造になっている。すなわち、搬送ベルト往路ガイド240がシミュレータ本体111に対して太陽電池モジュールMの側に配されているとともに、搬送ベルト復路ガイド250がシミュレータ本体111に対して太陽電池モジュールMの反対側に配されている。これにより、ソーラーシミュレータ100から照射された疑似太陽光を遮光する構造部分を無くすことができる。すなわち、ソーラーシミュレータ100から照射された疑似太陽光を搬送ベルト復路ガイド250が遮光しないので、太陽電池モジュールMへの斜め入射光の光路が遮られにくい。この結果、斜め入射光を太陽電池モジュールMで受光されるようにすることができるので、太陽電池モジュールMの出力特性の測定誤差を低減できる。
【産業上の利用可能性】
【0026】
以上のように、本発明にかかる搬送装置は、太陽電池モジュールの搬送に有用である。
【符号の説明】
【0027】
1 太陽電池素子
2 導線
3 接続導線
4 ガラスパネル
5 封止樹脂フィルム
6 +側出力端子ボックス
7 −側出力端子ボックス
8 長辺フレーム
9 短辺フレーム
10 出力ケーブル
11 出力端子
100 ソーラーシミュレータ
111 シミュレータ本体
112 測定器
113 ランプ
114 反射板
115 フィルタ
116 照射面
200 搬送装置
217 モーター
218 モータープーリー
219 駆動ベルト
220 駆動プーリー
221 ボールスプライン
222−1、222−2 搬送プーリー
223 搬送ベルト
225 テンションプーリー
226−1、226−2 復路プーリー
240 搬送ベルト往路ガイド
241 上部ガイド
242 下部ガイド
243 側部ガイド
250 搬送ベルト復路ガイド
251 上部ガイド
252 下部ガイド
253 側部ガイド
300 シミュレータ装置
923 搬送ベルト
926 復路プーリー
940 搬送ベルト往路ガイド
941 上部ガイド
942 下部ガイド
943 側部ガイド
950 搬送ベルト復路ガイド
951 上部ガイド
952 下部ガイド
953 側部ガイド
M 太陽電池モジュール
【特許請求の範囲】
【請求項1】
太陽電池モジュールを搬送する搬送装置であって、
前記太陽電池モジュールの受光面がソーラーシミュレータの本体と対向する位置へ前記太陽電池モジュールを搬送する搬送ベルトと、
前記ソーラーシミュレータの本体に対して前記太陽電池モジュールの側に配され、前記搬送ベルトを搬送方向へ案内する往路ガイド部材と、
前記ソーラーシミュレータの本体に対して前記太陽電池モジュールと反対側に配され、前記往路ガイド部材により案内された前記搬送ベルトを前記搬送方向と反対方向へ案内する復路ガイド部材と、
を備えたことを特徴とする搬送装置。
【請求項2】
太陽電池モジュールのシミュレータ装置であって、
前記太陽電池モジュールの受光面へ擬似太陽光を照射させるソーラーシミュレータと、
前記太陽電池モジュールの受光面がソーラーシミュレータの本体と対向する位置へ前記太陽電池モジュールを搬送する搬送ベルトと、
前記ソーラーシミュレータの本体に対して前記太陽電池モジュールの側に配され、前記搬送ベルトを搬送方向へ案内する往路ガイド部材と、
前記ソーラーシミュレータの本体に対して前記太陽電池モジュールと反対側に配され、前記往路ガイド部材により案内された前記搬送ベルトを前記搬送方向と反対方向へ案内する復路ガイド部材と、
を備え、
前記ソーラーシミュレータは、前記太陽電池モジュールの受光面へ擬似太陽光を照射させた状態で、前記太陽電池モジュールの出力特性を測定する
ことを特徴とするシミュレータ装置。
【請求項1】
太陽電池モジュールを搬送する搬送装置であって、
前記太陽電池モジュールの受光面がソーラーシミュレータの本体と対向する位置へ前記太陽電池モジュールを搬送する搬送ベルトと、
前記ソーラーシミュレータの本体に対して前記太陽電池モジュールの側に配され、前記搬送ベルトを搬送方向へ案内する往路ガイド部材と、
前記ソーラーシミュレータの本体に対して前記太陽電池モジュールと反対側に配され、前記往路ガイド部材により案内された前記搬送ベルトを前記搬送方向と反対方向へ案内する復路ガイド部材と、
を備えたことを特徴とする搬送装置。
【請求項2】
太陽電池モジュールのシミュレータ装置であって、
前記太陽電池モジュールの受光面へ擬似太陽光を照射させるソーラーシミュレータと、
前記太陽電池モジュールの受光面がソーラーシミュレータの本体と対向する位置へ前記太陽電池モジュールを搬送する搬送ベルトと、
前記ソーラーシミュレータの本体に対して前記太陽電池モジュールの側に配され、前記搬送ベルトを搬送方向へ案内する往路ガイド部材と、
前記ソーラーシミュレータの本体に対して前記太陽電池モジュールと反対側に配され、前記往路ガイド部材により案内された前記搬送ベルトを前記搬送方向と反対方向へ案内する復路ガイド部材と、
を備え、
前記ソーラーシミュレータは、前記太陽電池モジュールの受光面へ擬似太陽光を照射させた状態で、前記太陽電池モジュールの出力特性を測定する
ことを特徴とするシミュレータ装置。
【図1】



【図2】
【図3】
【図4】
【図5】
【図6】

【図7】
【図8】

【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2013−55118(P2013−55118A)
【公開日】平成25年3月21日(2013.3.21)
【国際特許分類】
【出願番号】特願2011−190631(P2011−190631)
【出願日】平成23年9月1日(2011.9.1)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成25年3月21日(2013.3.21)
【国際特許分類】
【出願日】平成23年9月1日(2011.9.1)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]