
遠隔操縦装置
【課題】可動範囲の広い手首の3自由度回転運動と、指の開閉運動の動きを、操作性を損なうことなく検出、再現することができる簡潔な構造の装置を提供すること。
【解決手段】円弧状の右第1、2アーム(110,120)、及び、左第1、2アーム(210,220)とを具備し、左右第1アームの基端が同軸的に下部メカボックス(100)に回転可能に取り付けられ、下部メカボックスにはアーム角度位置検出手段(115,215)が備えられ、左右第1アームの先端に左右第2アームの基部がリンク連結され、左右第2アームの先端が上部結合軸(230)を介してリンク連結され上部結合軸に対して上部メカボックス(300)がその回りを回転可能に取り付けられ上部メカボックスは上部メカボックス角度位置検出手段(340)を具備し、またグリップ(500)と角度位置が検出可能な指従動リンク機構(400)が取付けられている。
【解決手段】円弧状の右第1、2アーム(110,120)、及び、左第1、2アーム(210,220)とを具備し、左右第1アームの基端が同軸的に下部メカボックス(100)に回転可能に取り付けられ、下部メカボックスにはアーム角度位置検出手段(115,215)が備えられ、左右第1アームの先端に左右第2アームの基部がリンク連結され、左右第2アームの先端が上部結合軸(230)を介してリンク連結され上部結合軸に対して上部メカボックス(300)がその回りを回転可能に取り付けられ上部メカボックスは上部メカボックス角度位置検出手段(340)を具備し、またグリップ(500)と角度位置が検出可能な指従動リンク機構(400)が取付けられている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明はロボットや仮想現実下の操縦対象を遠隔操縦するための遠隔操縦装置に関する。
【背景技術】
【0002】
ロボットや仮想現実下の操縦対象の遠隔操縦がすでにいろいろな分野で使用されている。例えば、災害地や危険地区、あるいは、極限環境、宇宙空間での作業、物の移動等のために遠隔操縦が行われており、また、医療等の分野では手術トレーニング装置、遠隔手術のための遠隔操縦の研究が進められている。また、アミューズメント分野においては仮想現実下の操縦対象の遠隔操縦の開発が進められている。
ロボットの遠隔操縦をおこなうということは、ロボットのオペレータの操作情報(通常は手の動き)を検出してロボットに送り、ロボットが送られた操作情報にもとづき操作をおこなうということである。最近では、より適確な操作がおこなうことができるように力覚のフィードバックをおこなうものもあり、それも含めて多くの研究、開発が行われている。
また、仮想現実下の遠隔操縦をおこなうということは、仮想現実下において計算機上に表現された操縦対象を操縦装置の情報をもとに動作させるということである。ロボットの場合と同様に仮想現実下で表現された操縦対象に接触した場合には、対象に接触した場合に操縦対象が感じるであろう感覚を擬似的に創出し、操縦装置にフィードバックするような研究も数多くおこなわれている。
【0003】
操作情報を検出するものとしては例えばジョイスティックが一般的に多く使われている。しかしこのタイプのものはそもそもジョイスティックの動作が手首の運動と対応していないために、操縦に違和感が生じる場合がある。
【0004】
SensAble Technologies 社のPhantom Omni Deviceや、特許文献1の装置は、小型のマニピュレータの先端を指でつかんで作動させることで手首の動きを計測すると同時に、小型のマニピュレータの駆動系の生成力で指に力覚を返すものであるが小型のマニピュレータを机などに固定した状態で使用する必要があり、使用条件が制限され、またシステム全体の構成をコンパクトにできないという問題がある。
特許文献2の装置は球面リンク機構をもちいており比較的コンパクトな構造を有するものであるが、力覚を与えようとすると動き回る関節部分にモータ等の駆動系を取り付けねばならず、その分大きな質量を動かさねばならず軽快な操作感が得られない恐れがある。
特許文献3、特許文献4は1つの回転中心周りに3軸方向のモーメントを生成する手術シミュレータである。しかし、赤道部、南極部に複雑な機構を配設する必要があり、大きなスペースを要する。
非特許文献1の図4の装置は球座標型の5節リンク機構を用いているが軸回転部A,Bが離間しており経度方向の可動範囲が大きくとれない。
非特許文献2の装置は力覚フィードバックをおこなう装置であるが装置が多数のリンクを含み構造が複雑であり、かつ大型であり、台上に設置して使用することが必要と思われ使用範囲が限定される。
非特許文献3の装置も非特許文献1の装置と同様に台上に設置して使用することが必要と思われ使用範囲が限定される。
CyberGlove Systems 社のCyberGrasp は指先に力覚フィードバックをおこなうものであるが手の甲にかさばる機構を取り付ける必要があり、軽快に操作することが難しい。Force Dimension 社のOmega シリーズも力覚フィードバックをおこなう装置であるが複雑、大型である。
特許文献5,特許文献6は指の動きを検出し、また、力覚フィードバックをおこなうための機構である。しかし、手の甲の部分にかさばる機構を装備する必要があり軽快に操作することができず、装着にも手間がかかるという問題がある。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】米国特許6946812B1
【特許文献2】特開2009−274200
【特許文献3】米国特許出願公開2005/0162383
【特許文献4】米国特許出願公開2004/0145563A9
【特許文献5】米国特許6042555
【特許文献6】米国特許6275213
【非特許文献】
【0006】
【非特許文献1】Berbard D. Adelstein et al, "KINEMATIC DESIGN OF A THREE DEGREE OF FREEDOM PARALLEL HAND CONTROLLER MECHANISM, Proceedings of the ASME Dynamic Systems and Control Division, DSC-Vol. 58, pp.539-546, 1996
【非特許文献2】Y.Tsumaki et al. "Design of Compact 6-DOF Haptic Interface
【非特許文献3】荒田他「パラレルリンク機構を用いた力覚提示装置 DELTA−4の開発」、日本ロボット学会誌27巻8号
【発明の概要】
【発明が解決しようとする課題】
【0007】
本願発明は、上記問題に鑑み、オペレータがロボット等の操縦対象を遠隔操縦するための遠隔操縦装置であって、可動範囲の広い手首の3自由度回転運動と、指の開閉運動の動きを、操作性を損なうことなく検出することができる簡潔な構造の遠隔操縦装置を提供することを目的とする。また、加えて力覚のフィードバックも行える遠隔操縦装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
請求項1の発明では、操縦対象を遠隔操縦するための遠隔操縦装置であって、
それぞれ円弧状の右第1アームと右第2アームと、それぞれ円弧状の左第1アームと左第2アームと、を具備し、
右第1アームの基端と左第1アームの基端とが下部軸線まわりを回動可能にリンク連結されて下部メカボックスに同軸に取り付けられ、下部メカボックスには右第1アームの角度位置を検出する右第1アーム角度位置検出手段と、左第1アームの角度位置を検出する左第1アーム角度位置検出手段と、が備えられ、
右第1アームの先端に右第2アームの基部がそれぞれ右アーム連結軸線まわりを回動可能にリンク連結され、左第1アームの先端に左第2アームの基部がそれぞれ左アーム連結軸線まわりを回動可能にリンク連結され、
右第2アームの先端と左第2アームの先端が上部結合軸を介してリンク連結され、上部結合軸に対して上部メカボックスが上部結合軸の回りを回転できるように取り付けられていて、上部メカボックスにはオペレータが握るためのグリップが取り付けられ、
上部メカボックスには上部メカボックスの基準角度位置に対する角度位置の検出をする上部メカボックス角度位置検出手段と、少なくとも1つの指の動きに従動する指従動リンク機構と、指従動リンク機構の一部のリンクの角度位置の検出をする指従動リンク角度位置検出手段が取り付けられており、
右第1アーム角度位置検出手段、左第1アーム角度位置検出手段、上部メカボックス角度位置検出手段、および、指従動リンク角度位置検出手段の検出値にもとづき、オペレータの手先の姿勢、および、指先の情報を操縦対象に送ることができ、
上部結合軸の軸線と、下部軸線と、右アーム連結軸線と、左アーム連結軸線とのすべてが、手首の3自由度回転の回転中心の近傍の1点において交わる球面座標構造を形成するように、右第1アーム、右第2アーム、左第1アーム、左第2アーム、および、各リンク連結が設定されていて、前記グリップが前記球面座標構造の略中心に位置せしめられている、
ことを特徴とする遠隔操縦装置が提供される。
【0009】
請求項2の発明では、上部メカボックスの角度位置を検出するための基準角度位置を生成する基準角度位置生成手段を具備する。
請求項3の発明では、上部結合軸が右第2アームの先端または左第2アームの先端に対して固定されていて、基準角度位置生成手段は、上部メカボックスの角度位置の計算時に該右第2アームの先端または左第2アームの先端に対して固定された上部結合軸の外周上の予め定めた位置から計測した角度位置を、右第1アームと左第1アームの角度位置にもとづき修正する修正手段である。
請求項4の発明では、基準角度位置生成手段は、右第2アームの先端に固定された右先端歯車および左第2アームの先端に固定された左先端歯車と、上部結合軸に対して回転可能に取り付けられた円板と、該円板に回転可能に取り付けられ右先端歯車とのみ係合する右係合歯車および左先端歯車とのみ係合する左係合歯車とを具備し、右先端歯車と左先端歯車とを互いに係合せしめて前記円板を姿勢一定に保持してなり、該姿勢一定に保持された円板に基準角度位置が設定される。
請求項5の発明では、基準角度位置生成手段は、右第2アームの先端および左第2アームの先端から延長された互いに等長の右第1延長部および左第1延長部と、基部が右第1延長部と左第1延長部のそれぞれの先端にリンク連結され、先端部が先端軸を介して互いにリンク連結されている、右第2延長部と左第2延長部と、上部結合軸に対して回転可能に取り付けられた円板と、該円板に固定され前記先端軸が係合する長穴と、を具備し、前記円板を姿勢一定に保持してなり、該姿勢一定に保持された円板に基準角度位置が設定される。
【0010】
請求項6の発明では、指従動リンク機構は、2つの連結軸で連結された3つのリンク片を具備し、連結された3つのリンク片の一端が上部メカボックスに固定された第1固定部に回動自在に連結され、他端が上部メカボックスに固定された第2固定部に取り付けられたクランクアームの先端に回動自在に取り付けられ、第1固定部が指のMP関節部に、第1固定部に回動自在に連結されているリンク片の反第1固定部側の端部が指のPIP関節部に合うようにリンク片の長さが選択され、
クランクアームが取り付けられている回転軸は第2固定部を介して角度検出手段に連結されていて、検出されたアームの角度位置にもとづき、指の開閉を検出する。
請求項7の発明では、指従動リンク機構は、指の開き側と閉じ側の動きに追従可能な指開閉追従手段を含む。
請求項8の発明では、指開閉追従手段は、前記3つのリンク片のうちの中間のリンク片を指の末節骨、中節骨部分に密着せしめる密着手段である。
請求項9の発明では、指開閉追従手段は、前記第1固定部および第2固定部に設けられ3つのリンク片の一端と他端に付勢力を与える一対の付勢手段である。
【0011】
請求項10の発明では、右第1アーム角度位置検出手段の検出した右第1アーム角度位置と、左第1アーム角度位置検出手段の検出した左第1アーム角度位置とにもとづき、オペレータの手先のヨー変移、ピッチ変移を検出し、上部メカボックス角度位置検出手段の検出した上部メカボックス角度位置にもとづきオペレータの手先のロール変移を検出する。
請求項11の発明では、ロボットが反力を受けたときにその反力に応じた力覚をオペレータに与えるために駆動装置を備える。
【発明の効果】
【0012】
本発明の遠隔操縦装置では、右第1アーム角度位置検出手段、左第1アーム角度位置検出手段、上部メカボックス角度位置検出手段、および、指従動リンク角度位置検出手段の検出値にもとづき、オペレータの手先の姿勢、および、指先の姿勢の情報をロボット等の操縦対象に送ることができ、少ない検出手段で多くの情報を操縦対象に送ることが可能である。また、オペレータが操縦をおこなうために握るグリップが球座標構造の略中心に位置せしめられ、装置の回転運動の中心が手首の運動の中心に近接しているので操縦するときの違和感が少なく、また全体がコンパクトである。
【図面の簡単な説明】
【0013】
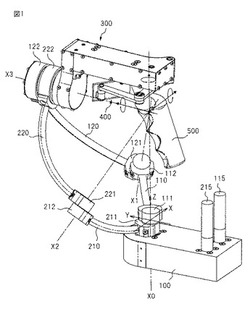
【図1】右手用の本発明の装置の全体構成を後左上方向から見た斜視図である。
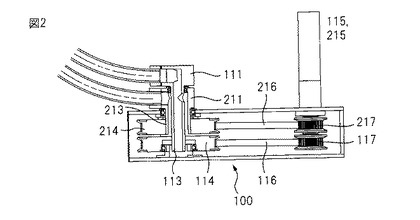
【図2】下部メカボックスの内部の構造を示す図である。
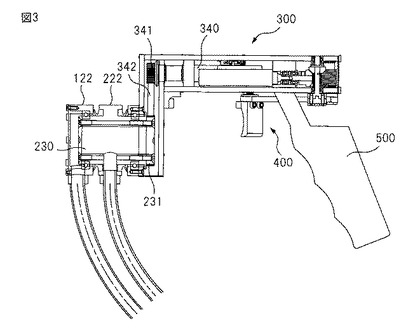
【図3】上部メカボックスの内部の構造を示す図である。
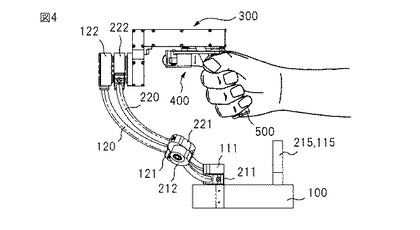
【図4】手先(手首よりも先のグリップを握った部分)が腕に対していずれの方向にも傾斜していない中立状態のときの装置を側方から見た図である。
【図5】図4を前方から見た図である。
【図6】図4を上方から見た図である。
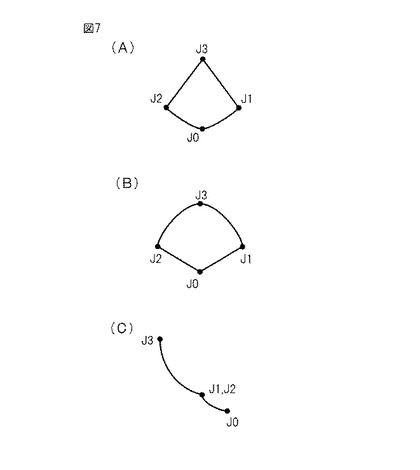
【図7】図4,5,6に示される中立状態における4つのアームの連結の様子を模式的に示したものである。(A)は前方から、(B)は上方から、(C)は側方から、見た図である。
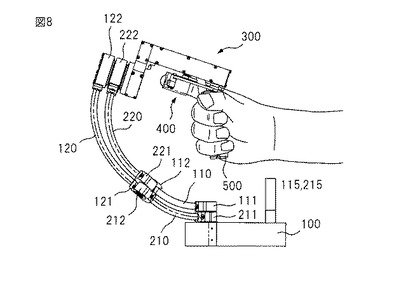
【図8】手先を腕に対して上向きにピッチ変移したときの装置を側方から見た図である。
【図9】手先を腕に対して下向きにピッチ変移したときの装置を側方から見た図である。
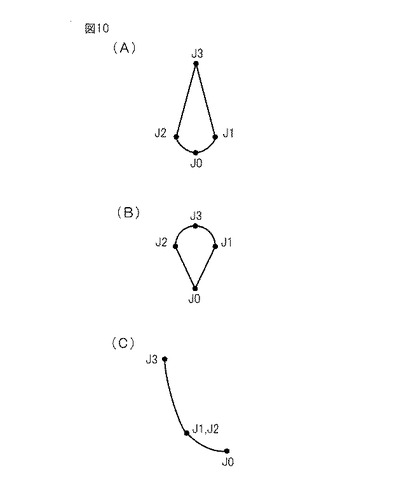
【図10】図8の状態における4つのアームの連結の様子を図7と同様に模式的に示したものである。
【図11】図9の状態における4つのアームの連結の様子を図7と同様に模式的に示したものである。
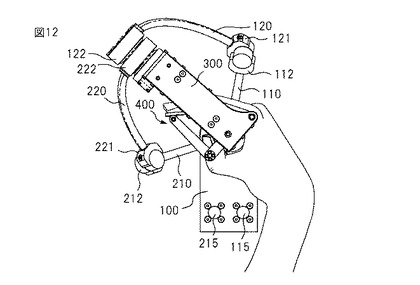
【図12】手先を腕に対して内向きにヨー変移させたときの装置を上方から見た図である。
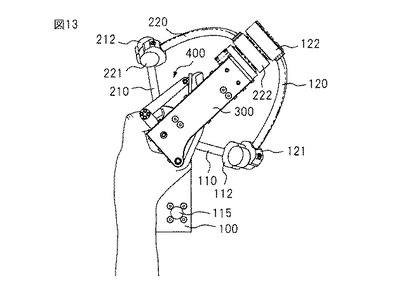
【図13】手先を腕に対して外向きにヨー変移させたときの装置を上方から見た図である。
【図14】図12の状態における4つのアームの連結の様子を図7と同様に模式的に示したものである。
【図15】図13の状態における4つのアームの連結の様子を図7と同様に模式的に示したものである。
【図16】手の甲が上になるようにロール変移させた(捻った)ときの装置を前方から見た図である。
【図17】図16の状態を上方から見た図である。
【図18】手の甲が下になるようにロール変移させた(捻った)ときの装置を前方から見た図である。
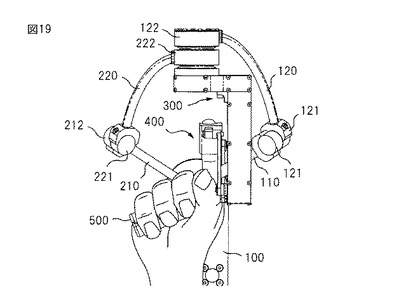
【図19】図18の状態を上方から見た図である。
【図20】ヒトの右手の指の骨の構造を示す図である。
【図21】指従動リンク機構の構成をしめす図であって、(A)第2指(ひとさし指)がほぼまっすぐな場合をしめしている。(B)第2指(ひとさし指)を少し曲げた場合をしめしている。(C)第2指(ひとさし指)を、物を掴めるほど大きく曲げた場合をしめしている。
【図22】上部メカボックスの内部を示す図である。
【図23】右第1アームの角度αと左第1アームの角度βを説明する図である。
【図24】ヨー角θyと右第1アームの角度αと左第1アームの角度βの関係を示す図である。
【図25】ピッチ角の検出を説明するための図である。
【図26】ロール角の検出のずれの補正を説明するための図である。
【図27】ロール角の検出のずれが発生しないようにした第1の変形例の構造を示す図であって、 (A)は完成図であり、 (B)は分解組み立て図である。
【図28】ロール角の検出のずれが発生しないようにした第2の変形例の構造を示す図であって、 (A)は完成図であり、 (B)は分解組み立て図である。
【発明を実施するための形態】
【0014】
以下、添付の図面を参照して本発明の操作情報検出再現装置の実施形態を説明する。
図1は右手用の本発明の装置の全体構成を示す図であって後左上方向から見た斜視図である。左手用も同じように構成される。
下部メカボックス100に、円弧状の右第1アーム110の右第1アーム基端部材111と円弧状の左第1アーム210の左第1アーム基端部材211が同軸的に回動可能に連結されている。
【0015】
そして右第1アーム110に取り付けられた右第1アーム先端部材112が円弧状の右第2アーム120に取り付けられた右第2アーム基端部材121と相互に回動可能に連結されている。
同様に、左第1アーム210に取り付けられた左第1アーム先端部材212が円弧状の左第2アーム220に取り付けられた左第2アーム基端部材221と相互に回動可能に連結されている。右第2アーム120に取り付けられた右第2アーム先端部材122と左第2アーム220に取り付けられた左第2アーム先端部材222が相互に回動可能に連結されている。
【0016】
図2に下部メカボックス100の内部構造が示されており、右第1アーム基端部材111に軸113が取り付けられ、軸113の下端部には右アームプーリ114が取り付けられている。左第1アーム基端部材211に軸213が取り付けられ、軸213の下端部には左アームプーリ214が取り付けられている。
右アームプーリ114は右アームベルト116を介して右アームモータ115の軸に取り付けられた右アームモータプーリ117と連結されている。同様に、左アームプーリ214は左アームベルト216を介して左アームモータ215の軸に取り付けられた左アームモータプーリ217と連結されている。
【0017】
図3に上部メカボックス300および、右第2アーム先端部材122、左第2アーム先端部材222の内部構造が示されている。左第2アーム先端部材222には軸230が固定されている。右第2アーム先端部材122はこの軸230に対して自由に回転できる。軸230は上部メカボックス300内に延伸し、その端部にはプーリ231が取り付けられている。このプーリ231はベルト342を介して上部メカボックス300内に配置されたロールモータ340の軸に取り付けられたロールモータプーリ341と連結されている。
【0018】
右アームモータ115、左アームモータ215、ロールモータ340には、図示しないが、それぞれ、右第1アーム110、左第1アーム210、上部メカボックス300の基準角度位置に対する角度変移量を検出できる角度検出センサが取り付けられている。角度検出センサは、例えば、ポテンシオメータ式のものとされる。
【0019】
右第1アーム110の右第1アーム基端部材111と左第1アーム210の左第1アーム基端部材211が同軸的に回動可能に連結されているので4リンク4節構造を成しているが、右第1アーム110の右第1アーム基端部材111と左第1アーム210の左第1アーム基端部材211を離間してそれぞれ独立に下部メカボックス100に回動可能に連結すれば5リンク5節構造となる。
【0020】
図示されるように、本発明の操縦装置は右第1アーム110の右第1アーム基端部材111と左第1アーム210の左第1アーム基端部材211の共通軸線X0、右第1アーム110の右第1アーム先端部材112と右第2アーム120の右第2アーム基端部材121との共通軸線X1、左第1アーム210の左第1アーム先端部材212が左第2アーム220の左第2アーム基端部材221の共通軸線X2、右第2アーム120の右第2アーム先端部材122と左第2アーム220の左第2アーム先端部材222の共通軸線X3は1つの点で交わる球座標構造を有している。
【0021】
図4は手先(手首よりも先のグリップを握った部分)が腕に対していずれの方向にも傾斜していない中立状態のときの装置を側方から見た図であり、図5は前方から見た図であり、図6は上方から見た図である。図7は図4,5,6に示される中立状態における4つのアームのリンク結合の様子を模式的に示したものである。(A)は前方から、(B)は上方から、(C)は側方から、見た図である。
【0022】
右第1アーム基端部材111と左第1アーム基端部材211の結節点をJ0、右第1アーム先端部材112と右第2アーム基端部材121の結節点をJ1、左第1アーム先端部材212と左第2アーム基端部材221の結節点をJ2,右第2アーム先端部材122と左第2アーム先端部材222の結節点をJ3で示してある。
【0023】
次に、ピッチ運動させたときについて説明する。
図8は手先を、ピッチ運動により、中立状態から腕に対して上向きに傾斜させたときの装置を側方から見た図であり、図9は手先を、ピッチ運動により、中立状態から腕に対して下向きに傾斜させたときの装置を側方から見た図である。図10は図8の状態における4つのアームのリンク結合の様子を図7と同様に模式的に示したものであり、図11は図9の状態における4つのアームのリンク結合の様子を図7と同様に模式的に示したものである。
【0024】
次に、ヨー運動させたときについて説明する。
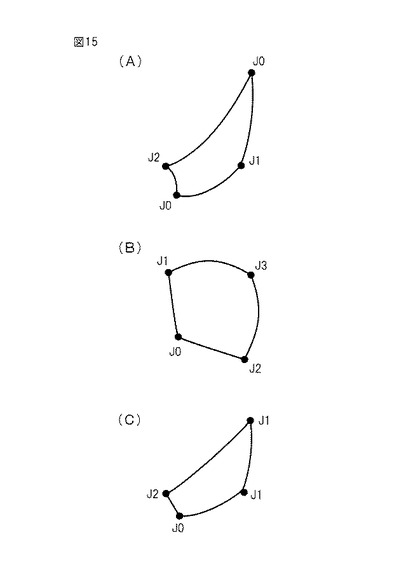
図12は手先を、ヨー運動により、中立状態から腕に対して内向きに傾斜させたときの装置を側方から見た図であり、図13は手先を、ヨー運動により、中立状態から腕に対して内向きに傾斜させたときの装置を側方から見た図である。図14は図12の状態における4つのアームのリンク結合の様子を図7と同様に模式的に示したものであり、図15は図13の状態における4つのアームのリンク結合の様子を図7と同様に模式的に示したものである。
【0025】
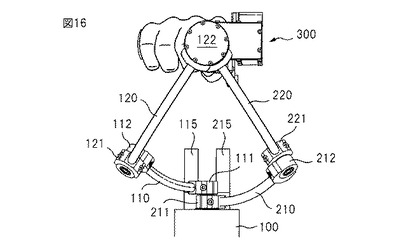
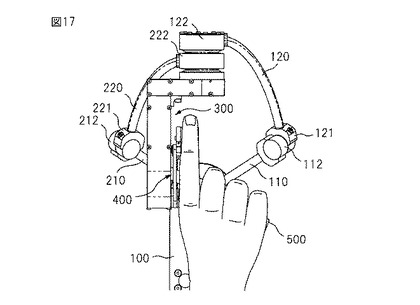
次に、ロール運動させたときについて説明する。
図16はロール運動により、中立状態から、手の甲が上になるように腕を捻ったときの装置を側方から見た図であり、図17は上方から見た図である。同様に、図18はロール運動により、中立状態から、手の甲が下になるように腕を捻ったときの装置を側方から見た図であり、図19は上方から見た図である。
【0026】
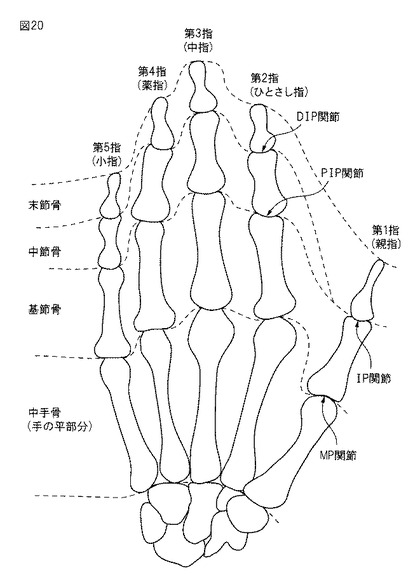
次に、指先の動きの検出、力覚付与をおこなうための指従動リンク機構400について説明するが、それに関して図20に、手先部分の骨、関節の名称を記載した。
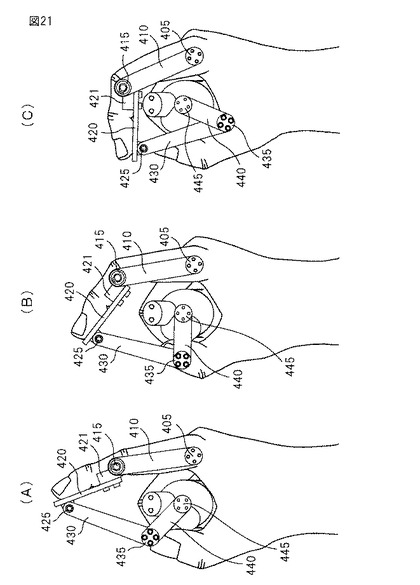
図21は指従動リンク機構400の構成、作動を説明する図であって、(A)は第2指がほぼまっすぐに伸びている状態を示し、(C)は第2指と第1指で物を掴める状態を示し、(B)はその中間の状態を示している。
【0027】
指従動リンク機構400は順次リンク連結されている第1指レバー410、第2指レバー420、第3指レバー430を有している。第1指レバー410と第2指レバー420は第1連結部415で連結され、第2指レバー420と第3指レバー430は第2連結部425で連結されている。
そして、第1指レバー410の始端側は上部メカボックス300に固定されている第1固定部405に回動自在に取り付けられている。第3指レバー430の終端側は第3連結部435で上部メカボックス300に固定されている第2固定部445からのびるクランクアーム440と回動自在に連結されている。
【0028】
第1指レバー410は第2指(ひとさし指)の基節骨部分の親指側の側面に添接され、第2指レバー420は第2指の中節骨、末節骨の部分の内側(手のひら側)の面に沿って延伸する。第2指レバー420を面ファスナー等を用いて指に係止することも可能である。
【0029】
使用時には、第1固定部405は概ね第2指のMP関節部に位置する。そして、第1指レバー410と第2指レバー420を連結する第1連結部415が第2指のPIP関節にくるように第1指レバー410、第2指レバー420の長さが選択されるが、好ましくは長さが調節可能にされる。クランクアーム440は第2固定部445を介して指先制御モータ450と連結されている。
【0030】
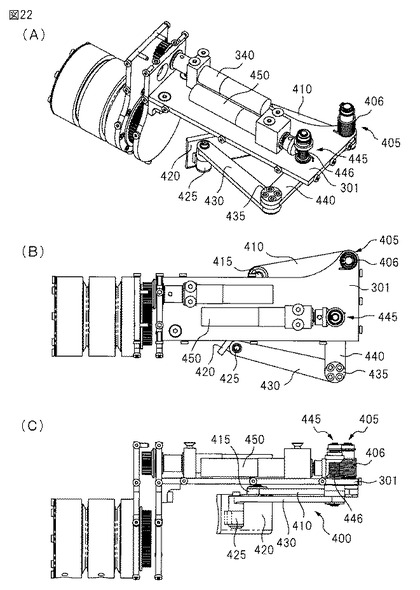
図22は上部メカボックス300のカバーを外して内部を説明する図である。
(A)、(B)、(C)いずれもニュートラルな状態のものであるが、(A)は斜め上方から見た図、(B)は上から見た図、(C)は側方から見た図である。
指従動リンク機構400の第1固定部405は上部メカボックス300のベース板301を貫通して上部メカボックス300の内部に延伸しており、そこでバネ406によって上から見て時計回り方向に付勢されている。
【0031】
指従動リンク機構400の第2固定部445は上部メカボックス300のベース板301を貫通して上部メカボックス300の内部に延伸しており指先制御モータ450と連結されている。また、バネ446によって上から見て時計回り方向に付勢されている。
指先制御モータ450の内部には図示しないが、第4指レバー440の基準角度位置に対する角度変移量(ロール角)を検出できる角度検出センサ、負荷を検出する負荷検出センサが取り付けられている。
【0032】
以下、ピッチ角、ヨー角、ロール角の検出について説明する。
まず、図23に示すように、各結節点、角度を以下のように定義する。
J0:右第1アーム110と左第1アーム210の結節点
J1:右第1アーム110と右第2アーム120の結節点
J2:左第1アーム210と左第2アーム220の結節点
J3:右第2アーム120と左第2アーム220の結節点
また、右第1アーム110のX軸から半時計周りに計測した角度をαと定義し、左第1アーム210のX軸から半時計周りに計測した角度をβと定義する。
【0033】
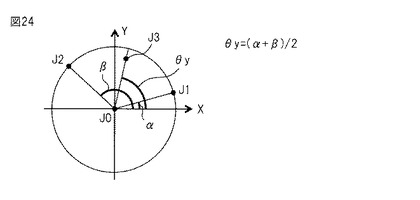
先ず、ヨー角θyについて説明する。
ヨー角θYは図1のZ方向から見たときのJ3の角度である。そして、J3は右第1アーム110、左第1アーム210の角度に係らず常にαとβの二等分線上にある。(図24参照)。したがって、以下の関係を有する。
ヨー角θy=(α+β)/2
【0034】
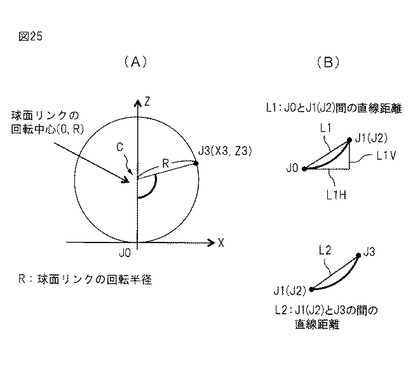
次に、ピッチ角θpについて説明する。
図25の(A)はJ0、J3を通る球面リンクをY方向から見た図である。
J3の座標X3、Z3は以下のように表される。
X3(α、β)=(R2−(Z3−R)2)1/2
Z3(α、β)=(A±B)/4(D2+E2)
そして、ピッチ角θpは以下のように表される。
θp=tan-1(X3(α、β)/(R−Z3(α、β))
【0035】
ここで、
R:球面リンクの回転半径
L1:J0とJ1(J2)の間の直線距離
L2:J1(J2)とJ3の間の直線距離
D=R−L1V
E=L1H・cos((β−α)/2)
A=−2(F×D−2R×E2))
B=2×E×(4R2×E2−(F2+4R×F×D))1/2 であって、
また、図25の(B)に示されるように、
L1V:J0とJ1(J2)の間の垂直直線距離
L1H:J0とJ1(J2)の間の水平直線距離
であり、また、
F=L12−L22 である。
【0036】
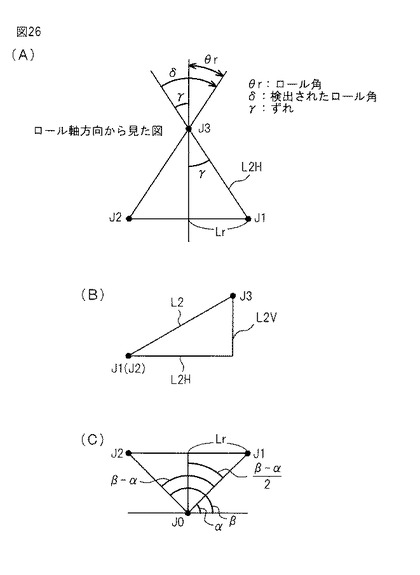
次にロール角θrの検出について説明する。
前述したように上部メカボックス300内のロールモータ340には上部メカボックス300の基準角度位置に対する角度変移量(ロール角)を検出できる角度検出センサが設けられている。この角度検出センサは左第2アーム先端部材222に固定された軸230の周面上の基準位置に対する角度を検出するものである。しかし、この軸230の周面上の基準位置はピッチ変移していると移動してしまう。
【0037】
図26の(A)が上記を説明する図である。
θrが絶対座標系における上部メカボックス300の傾きである。軸230がγだけ傾いていることを示し、角度検出センサが検出したδはγの値を含んでいる。
したがって、θr=δ−γという補正をおこなう必要がある。
【0038】
以下、上記の補正について説明する。
図26の(A)はロール軸方向から右第2アーム120と左第2アーム220のリンク連結部を見たものである。
γ=sin-1(Lr/L2H)
L2Hは図26(B)に示されるものである。
図26(C)はLrを説明する図であって、LrはZ方向から見た場合のL1H(図25(B)参照)にsin((β−α)/2)を乗じた値に等しい。
したがって、γ=sin-1((L1H・sin((β−α)/2)/L2H)である。
よって、θr=δ−sin-1((L1H・sin((β−α)/2)/L2H)
【0039】
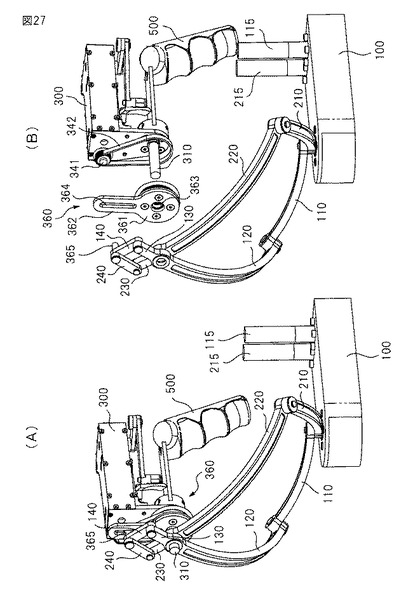
上記の補正は、軸230がピッチ変移にともなって絶対座標系上では回転してしまうことによって発生する。そこで、変形例として、基準角度位置が回転しないようにした変形例を2つ説明する。一方は、リンク機構を用いたものであり、他方は歯車を利用したものである。
【0040】
図27はリンク機構を用いた第1の変形例を示す図であって、(A)は全体図、(B)は分解組み立て図である。互いにリンク連結されている右第2アーム120、左第2アーム220の先に、互いに等長な右第2アーム第1延長部130、左第2アーム延長部230が延長されている。右第2アーム第1延長部130、左第2アーム第1延長部230の先には、さらに、それぞれ等長な右第2アーム第2延長部140、左第2アーム第2延長部240がリンク連結されている。右第2アーム第2延長部140の先端と左第2アーム第2延長部240の先端が先端軸365を介してリンク連結されている。
【0041】
一方、参照符号360で示されるのは上部メカボックス結合軸310を保持するするとともにロール角の基準角度位置を生成するための基準角度位置生成部材である。基準角度位置生成部材360は円形の基部361と基部361に一体に形成された突出部362からなり、基部361の中央には穴363が形成され、突出部362には長穴364が形成されている。基部361にはベルト342が係合されるプーリ365が固定されている。ベルト342は図2で示したものと同じであり、プーリ341と係合している。
【0042】
穴363には上部メカボックス結合軸310が相互回動可能に配置されている。一方、長穴364には先端軸が係合せしめられる。上部メカボックス結合軸310には上部メカボックス300が回動可能に取り付けられている。また、上部メカボックス結合軸310は右第2アーム120と左第2アーム220の先端のリンク連結ための軸としても利用されている。
【0043】
上記のような構成により基準角度位置生成部材360は絶対座標において回動せず常に一定の姿勢を保っている。このように一定の姿勢を保つ基準角度位置生成部材360に基準角度位置を設定することにより前述のように検出された上部メカボックス300の角度位置を修正する必要がない。
なお、グリップ500は図2に示されるように上部メカボックス300の下面に取り付けるのではなくて、上部メカボックス300の下方延長部に取り付けられている。
【0044】
図28は歯車を用いた第2の変形例を示す図であって、(A)は全体図、(B)は分解組み立て図である。
互いにリンク連結されている右第2アーム120、左第2アーム220の先端部分に半月形の右先端歯車150、左先端歯車250が付設されている。参照符号370で示されるのは上部メカボックス結合軸を保持するするするとともにロール角の姿勢の基準角度位置を生成するための基準角度位置生成部材である。基準角度位置生成部材370には右先端歯車150と噛合う右歯車371と左先端歯車250と噛合う左歯車372が固定されていて、右歯車371と左歯車372は相互に噛合っている。
【0045】
基準角度位置生成部材370の中央には穴373が形成され、また、ベルト342が係合されるプーリ365が固定されている。ベルト342は図2で示したものと同じであり、プーリ341と係合している。
穴373には上部メカボックス結合軸310が相互回動可能に配置されている。上部メカボックス結合軸310には上部メカボックス300が回動不能に取り付けられている。また、上部メカボックス結合軸310は右第2アーム120と左第2アーム220の先端のリンク連結ための軸としても利用されている。
【0046】
上記のような構成により基準角度位置生成部材370には右先端歯車150、左先端歯車250は常に逆方向の回転しか許容しないため、基準角度位置生成部材は回転しない。したがって、絶対座標において回動せず常に一定の姿勢を保っている。このように一定の姿勢を保つ基準角度位置生成部材370に基準角度位置を設定することにより前述のように検出された上部メカボックス300の角度位置を修正する必要がない。
【0047】
次に、指従動リンク機構400の第2レバー420の先端(ひとさし指の先端部)の第2連結部425の位置の検出について説明する。
第1指レバー410は固定されていないが第1レバー410の自由端にある第1固定部405は概ね第2指のMP関節部にあるようにされる。したがって、第1固定部405の位置はほぼ固定されている。したがって、第1固定部405、第2固定部445が固定された5節リンク機構を形成していることになる。
したがって、上部メカボックス300内の指先制御モータ450の角度検出センサが検出する基準角度位置からの変移量を測定することにより第2連結部425の第2固定部445に対する位置をもとめることができる。
【0048】
右アームモータ115、左アームモータ215、ロールモータ340、および、指先制御モータ450に設けられた角度検出センサの検出した信号は、図示しない、適切な、有線または無線の伝達手段によりロボット等の操縦対象に伝達され、伝達された信号にもとづきロボット等の操縦対象の対応する部位が動いて所望の操作が行われる。
ここで、ロボット等の操縦対象が何らかの対象物に接触し反力を受けるとその反力はロボット等の操縦対象にあらかじめ備えられたセンサにより検出され、その信号が本発明の操縦装置に伝達される。
すると、伝達された信号にもとづいて右アームモータ115、左アームモータ215、ロールモータ340、指先制御モータ450等の駆動装置が作動せしめられてオペレータに力覚が与えられるが、その際に力覚が目標値になるように駆動装置にはその力に相当する電流が供給される。より正確な力覚を与える場合には、ここに負荷検出センサを設けてもよい。なお、力覚はあらかじめ定めた倍力比によりロボットが検出した力に対して倍力されるが、倍力比は1より小さい場合もあれば、1より大きい場合もある。
上記のような信号の送受、倍力比の設定、および、前述したロール角の検出値の補正等のために下部メカボックス100または上部メカボックス300内に、図示しないが制御装置が設けられている。
【産業上の利用可能性】
【0049】
本発明はロボットや仮想現実下の操縦対象を遠隔操縦するための遠隔操縦装置であり、遠隔操縦をおこなうロボットや仮想現実を利用するアミューズメント装置等に広く適用できる。
【符号の説明】
【0050】
100 下部メカボックス
110 右第1アーム
111 右第1アーム基端部材
112 右第1アーム先端部材
120 右第2アーム
121 右第2アーム基端部材
122 右第2アーム先端部材
210 左第1アーム
211 左第1アーム基端部材
212 左第1アーム先端部材
220 左第2アーム
221 左第2アーム基端部材
222 左第2アーム先端部材
300 上部メカボックス
310 上部メカボックス結合軸
340 ロールモータ
360 基準角度位置生成部材
370 基準角度位置生成部材
400 指先動き検出装置
405 第1固定部、
410 第1指レバー
415 第1連結部
420 第2指レバー
425 第2連結部
430 第3指レバー
435 第3連結部
440 クランクアーム
445 第2固定部
450 指先制御モータ
500 グリップ
【技術分野】
【0001】
本発明はロボットや仮想現実下の操縦対象を遠隔操縦するための遠隔操縦装置に関する。
【背景技術】
【0002】
ロボットや仮想現実下の操縦対象の遠隔操縦がすでにいろいろな分野で使用されている。例えば、災害地や危険地区、あるいは、極限環境、宇宙空間での作業、物の移動等のために遠隔操縦が行われており、また、医療等の分野では手術トレーニング装置、遠隔手術のための遠隔操縦の研究が進められている。また、アミューズメント分野においては仮想現実下の操縦対象の遠隔操縦の開発が進められている。
ロボットの遠隔操縦をおこなうということは、ロボットのオペレータの操作情報(通常は手の動き)を検出してロボットに送り、ロボットが送られた操作情報にもとづき操作をおこなうということである。最近では、より適確な操作がおこなうことができるように力覚のフィードバックをおこなうものもあり、それも含めて多くの研究、開発が行われている。
また、仮想現実下の遠隔操縦をおこなうということは、仮想現実下において計算機上に表現された操縦対象を操縦装置の情報をもとに動作させるということである。ロボットの場合と同様に仮想現実下で表現された操縦対象に接触した場合には、対象に接触した場合に操縦対象が感じるであろう感覚を擬似的に創出し、操縦装置にフィードバックするような研究も数多くおこなわれている。
【0003】
操作情報を検出するものとしては例えばジョイスティックが一般的に多く使われている。しかしこのタイプのものはそもそもジョイスティックの動作が手首の運動と対応していないために、操縦に違和感が生じる場合がある。
【0004】
SensAble Technologies 社のPhantom Omni Deviceや、特許文献1の装置は、小型のマニピュレータの先端を指でつかんで作動させることで手首の動きを計測すると同時に、小型のマニピュレータの駆動系の生成力で指に力覚を返すものであるが小型のマニピュレータを机などに固定した状態で使用する必要があり、使用条件が制限され、またシステム全体の構成をコンパクトにできないという問題がある。
特許文献2の装置は球面リンク機構をもちいており比較的コンパクトな構造を有するものであるが、力覚を与えようとすると動き回る関節部分にモータ等の駆動系を取り付けねばならず、その分大きな質量を動かさねばならず軽快な操作感が得られない恐れがある。
特許文献3、特許文献4は1つの回転中心周りに3軸方向のモーメントを生成する手術シミュレータである。しかし、赤道部、南極部に複雑な機構を配設する必要があり、大きなスペースを要する。
非特許文献1の図4の装置は球座標型の5節リンク機構を用いているが軸回転部A,Bが離間しており経度方向の可動範囲が大きくとれない。
非特許文献2の装置は力覚フィードバックをおこなう装置であるが装置が多数のリンクを含み構造が複雑であり、かつ大型であり、台上に設置して使用することが必要と思われ使用範囲が限定される。
非特許文献3の装置も非特許文献1の装置と同様に台上に設置して使用することが必要と思われ使用範囲が限定される。
CyberGlove Systems 社のCyberGrasp は指先に力覚フィードバックをおこなうものであるが手の甲にかさばる機構を取り付ける必要があり、軽快に操作することが難しい。Force Dimension 社のOmega シリーズも力覚フィードバックをおこなう装置であるが複雑、大型である。
特許文献5,特許文献6は指の動きを検出し、また、力覚フィードバックをおこなうための機構である。しかし、手の甲の部分にかさばる機構を装備する必要があり軽快に操作することができず、装着にも手間がかかるという問題がある。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】米国特許6946812B1
【特許文献2】特開2009−274200
【特許文献3】米国特許出願公開2005/0162383
【特許文献4】米国特許出願公開2004/0145563A9
【特許文献5】米国特許6042555
【特許文献6】米国特許6275213
【非特許文献】
【0006】
【非特許文献1】Berbard D. Adelstein et al, "KINEMATIC DESIGN OF A THREE DEGREE OF FREEDOM PARALLEL HAND CONTROLLER MECHANISM, Proceedings of the ASME Dynamic Systems and Control Division, DSC-Vol. 58, pp.539-546, 1996
【非特許文献2】Y.Tsumaki et al. "Design of Compact 6-DOF Haptic Interface
【非特許文献3】荒田他「パラレルリンク機構を用いた力覚提示装置 DELTA−4の開発」、日本ロボット学会誌27巻8号
【発明の概要】
【発明が解決しようとする課題】
【0007】
本願発明は、上記問題に鑑み、オペレータがロボット等の操縦対象を遠隔操縦するための遠隔操縦装置であって、可動範囲の広い手首の3自由度回転運動と、指の開閉運動の動きを、操作性を損なうことなく検出することができる簡潔な構造の遠隔操縦装置を提供することを目的とする。また、加えて力覚のフィードバックも行える遠隔操縦装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
請求項1の発明では、操縦対象を遠隔操縦するための遠隔操縦装置であって、
それぞれ円弧状の右第1アームと右第2アームと、それぞれ円弧状の左第1アームと左第2アームと、を具備し、
右第1アームの基端と左第1アームの基端とが下部軸線まわりを回動可能にリンク連結されて下部メカボックスに同軸に取り付けられ、下部メカボックスには右第1アームの角度位置を検出する右第1アーム角度位置検出手段と、左第1アームの角度位置を検出する左第1アーム角度位置検出手段と、が備えられ、
右第1アームの先端に右第2アームの基部がそれぞれ右アーム連結軸線まわりを回動可能にリンク連結され、左第1アームの先端に左第2アームの基部がそれぞれ左アーム連結軸線まわりを回動可能にリンク連結され、
右第2アームの先端と左第2アームの先端が上部結合軸を介してリンク連結され、上部結合軸に対して上部メカボックスが上部結合軸の回りを回転できるように取り付けられていて、上部メカボックスにはオペレータが握るためのグリップが取り付けられ、
上部メカボックスには上部メカボックスの基準角度位置に対する角度位置の検出をする上部メカボックス角度位置検出手段と、少なくとも1つの指の動きに従動する指従動リンク機構と、指従動リンク機構の一部のリンクの角度位置の検出をする指従動リンク角度位置検出手段が取り付けられており、
右第1アーム角度位置検出手段、左第1アーム角度位置検出手段、上部メカボックス角度位置検出手段、および、指従動リンク角度位置検出手段の検出値にもとづき、オペレータの手先の姿勢、および、指先の情報を操縦対象に送ることができ、
上部結合軸の軸線と、下部軸線と、右アーム連結軸線と、左アーム連結軸線とのすべてが、手首の3自由度回転の回転中心の近傍の1点において交わる球面座標構造を形成するように、右第1アーム、右第2アーム、左第1アーム、左第2アーム、および、各リンク連結が設定されていて、前記グリップが前記球面座標構造の略中心に位置せしめられている、
ことを特徴とする遠隔操縦装置が提供される。
【0009】
請求項2の発明では、上部メカボックスの角度位置を検出するための基準角度位置を生成する基準角度位置生成手段を具備する。
請求項3の発明では、上部結合軸が右第2アームの先端または左第2アームの先端に対して固定されていて、基準角度位置生成手段は、上部メカボックスの角度位置の計算時に該右第2アームの先端または左第2アームの先端に対して固定された上部結合軸の外周上の予め定めた位置から計測した角度位置を、右第1アームと左第1アームの角度位置にもとづき修正する修正手段である。
請求項4の発明では、基準角度位置生成手段は、右第2アームの先端に固定された右先端歯車および左第2アームの先端に固定された左先端歯車と、上部結合軸に対して回転可能に取り付けられた円板と、該円板に回転可能に取り付けられ右先端歯車とのみ係合する右係合歯車および左先端歯車とのみ係合する左係合歯車とを具備し、右先端歯車と左先端歯車とを互いに係合せしめて前記円板を姿勢一定に保持してなり、該姿勢一定に保持された円板に基準角度位置が設定される。
請求項5の発明では、基準角度位置生成手段は、右第2アームの先端および左第2アームの先端から延長された互いに等長の右第1延長部および左第1延長部と、基部が右第1延長部と左第1延長部のそれぞれの先端にリンク連結され、先端部が先端軸を介して互いにリンク連結されている、右第2延長部と左第2延長部と、上部結合軸に対して回転可能に取り付けられた円板と、該円板に固定され前記先端軸が係合する長穴と、を具備し、前記円板を姿勢一定に保持してなり、該姿勢一定に保持された円板に基準角度位置が設定される。
【0010】
請求項6の発明では、指従動リンク機構は、2つの連結軸で連結された3つのリンク片を具備し、連結された3つのリンク片の一端が上部メカボックスに固定された第1固定部に回動自在に連結され、他端が上部メカボックスに固定された第2固定部に取り付けられたクランクアームの先端に回動自在に取り付けられ、第1固定部が指のMP関節部に、第1固定部に回動自在に連結されているリンク片の反第1固定部側の端部が指のPIP関節部に合うようにリンク片の長さが選択され、
クランクアームが取り付けられている回転軸は第2固定部を介して角度検出手段に連結されていて、検出されたアームの角度位置にもとづき、指の開閉を検出する。
請求項7の発明では、指従動リンク機構は、指の開き側と閉じ側の動きに追従可能な指開閉追従手段を含む。
請求項8の発明では、指開閉追従手段は、前記3つのリンク片のうちの中間のリンク片を指の末節骨、中節骨部分に密着せしめる密着手段である。
請求項9の発明では、指開閉追従手段は、前記第1固定部および第2固定部に設けられ3つのリンク片の一端と他端に付勢力を与える一対の付勢手段である。
【0011】
請求項10の発明では、右第1アーム角度位置検出手段の検出した右第1アーム角度位置と、左第1アーム角度位置検出手段の検出した左第1アーム角度位置とにもとづき、オペレータの手先のヨー変移、ピッチ変移を検出し、上部メカボックス角度位置検出手段の検出した上部メカボックス角度位置にもとづきオペレータの手先のロール変移を検出する。
請求項11の発明では、ロボットが反力を受けたときにその反力に応じた力覚をオペレータに与えるために駆動装置を備える。
【発明の効果】
【0012】
本発明の遠隔操縦装置では、右第1アーム角度位置検出手段、左第1アーム角度位置検出手段、上部メカボックス角度位置検出手段、および、指従動リンク角度位置検出手段の検出値にもとづき、オペレータの手先の姿勢、および、指先の姿勢の情報をロボット等の操縦対象に送ることができ、少ない検出手段で多くの情報を操縦対象に送ることが可能である。また、オペレータが操縦をおこなうために握るグリップが球座標構造の略中心に位置せしめられ、装置の回転運動の中心が手首の運動の中心に近接しているので操縦するときの違和感が少なく、また全体がコンパクトである。
【図面の簡単な説明】
【0013】
【図1】右手用の本発明の装置の全体構成を後左上方向から見た斜視図である。
【図2】下部メカボックスの内部の構造を示す図である。
【図3】上部メカボックスの内部の構造を示す図である。
【図4】手先(手首よりも先のグリップを握った部分)が腕に対していずれの方向にも傾斜していない中立状態のときの装置を側方から見た図である。
【図5】図4を前方から見た図である。
【図6】図4を上方から見た図である。
【図7】図4,5,6に示される中立状態における4つのアームの連結の様子を模式的に示したものである。(A)は前方から、(B)は上方から、(C)は側方から、見た図である。
【図8】手先を腕に対して上向きにピッチ変移したときの装置を側方から見た図である。
【図9】手先を腕に対して下向きにピッチ変移したときの装置を側方から見た図である。
【図10】図8の状態における4つのアームの連結の様子を図7と同様に模式的に示したものである。
【図11】図9の状態における4つのアームの連結の様子を図7と同様に模式的に示したものである。
【図12】手先を腕に対して内向きにヨー変移させたときの装置を上方から見た図である。
【図13】手先を腕に対して外向きにヨー変移させたときの装置を上方から見た図である。
【図14】図12の状態における4つのアームの連結の様子を図7と同様に模式的に示したものである。
【図15】図13の状態における4つのアームの連結の様子を図7と同様に模式的に示したものである。
【図16】手の甲が上になるようにロール変移させた(捻った)ときの装置を前方から見た図である。
【図17】図16の状態を上方から見た図である。
【図18】手の甲が下になるようにロール変移させた(捻った)ときの装置を前方から見た図である。
【図19】図18の状態を上方から見た図である。
【図20】ヒトの右手の指の骨の構造を示す図である。
【図21】指従動リンク機構の構成をしめす図であって、(A)第2指(ひとさし指)がほぼまっすぐな場合をしめしている。(B)第2指(ひとさし指)を少し曲げた場合をしめしている。(C)第2指(ひとさし指)を、物を掴めるほど大きく曲げた場合をしめしている。
【図22】上部メカボックスの内部を示す図である。
【図23】右第1アームの角度αと左第1アームの角度βを説明する図である。
【図24】ヨー角θyと右第1アームの角度αと左第1アームの角度βの関係を示す図である。
【図25】ピッチ角の検出を説明するための図である。
【図26】ロール角の検出のずれの補正を説明するための図である。
【図27】ロール角の検出のずれが発生しないようにした第1の変形例の構造を示す図であって、 (A)は完成図であり、 (B)は分解組み立て図である。
【図28】ロール角の検出のずれが発生しないようにした第2の変形例の構造を示す図であって、 (A)は完成図であり、 (B)は分解組み立て図である。
【発明を実施するための形態】
【0014】
以下、添付の図面を参照して本発明の操作情報検出再現装置の実施形態を説明する。
図1は右手用の本発明の装置の全体構成を示す図であって後左上方向から見た斜視図である。左手用も同じように構成される。
下部メカボックス100に、円弧状の右第1アーム110の右第1アーム基端部材111と円弧状の左第1アーム210の左第1アーム基端部材211が同軸的に回動可能に連結されている。
【0015】
そして右第1アーム110に取り付けられた右第1アーム先端部材112が円弧状の右第2アーム120に取り付けられた右第2アーム基端部材121と相互に回動可能に連結されている。
同様に、左第1アーム210に取り付けられた左第1アーム先端部材212が円弧状の左第2アーム220に取り付けられた左第2アーム基端部材221と相互に回動可能に連結されている。右第2アーム120に取り付けられた右第2アーム先端部材122と左第2アーム220に取り付けられた左第2アーム先端部材222が相互に回動可能に連結されている。
【0016】
図2に下部メカボックス100の内部構造が示されており、右第1アーム基端部材111に軸113が取り付けられ、軸113の下端部には右アームプーリ114が取り付けられている。左第1アーム基端部材211に軸213が取り付けられ、軸213の下端部には左アームプーリ214が取り付けられている。
右アームプーリ114は右アームベルト116を介して右アームモータ115の軸に取り付けられた右アームモータプーリ117と連結されている。同様に、左アームプーリ214は左アームベルト216を介して左アームモータ215の軸に取り付けられた左アームモータプーリ217と連結されている。
【0017】
図3に上部メカボックス300および、右第2アーム先端部材122、左第2アーム先端部材222の内部構造が示されている。左第2アーム先端部材222には軸230が固定されている。右第2アーム先端部材122はこの軸230に対して自由に回転できる。軸230は上部メカボックス300内に延伸し、その端部にはプーリ231が取り付けられている。このプーリ231はベルト342を介して上部メカボックス300内に配置されたロールモータ340の軸に取り付けられたロールモータプーリ341と連結されている。
【0018】
右アームモータ115、左アームモータ215、ロールモータ340には、図示しないが、それぞれ、右第1アーム110、左第1アーム210、上部メカボックス300の基準角度位置に対する角度変移量を検出できる角度検出センサが取り付けられている。角度検出センサは、例えば、ポテンシオメータ式のものとされる。
【0019】
右第1アーム110の右第1アーム基端部材111と左第1アーム210の左第1アーム基端部材211が同軸的に回動可能に連結されているので4リンク4節構造を成しているが、右第1アーム110の右第1アーム基端部材111と左第1アーム210の左第1アーム基端部材211を離間してそれぞれ独立に下部メカボックス100に回動可能に連結すれば5リンク5節構造となる。
【0020】
図示されるように、本発明の操縦装置は右第1アーム110の右第1アーム基端部材111と左第1アーム210の左第1アーム基端部材211の共通軸線X0、右第1アーム110の右第1アーム先端部材112と右第2アーム120の右第2アーム基端部材121との共通軸線X1、左第1アーム210の左第1アーム先端部材212が左第2アーム220の左第2アーム基端部材221の共通軸線X2、右第2アーム120の右第2アーム先端部材122と左第2アーム220の左第2アーム先端部材222の共通軸線X3は1つの点で交わる球座標構造を有している。
【0021】
図4は手先(手首よりも先のグリップを握った部分)が腕に対していずれの方向にも傾斜していない中立状態のときの装置を側方から見た図であり、図5は前方から見た図であり、図6は上方から見た図である。図7は図4,5,6に示される中立状態における4つのアームのリンク結合の様子を模式的に示したものである。(A)は前方から、(B)は上方から、(C)は側方から、見た図である。
【0022】
右第1アーム基端部材111と左第1アーム基端部材211の結節点をJ0、右第1アーム先端部材112と右第2アーム基端部材121の結節点をJ1、左第1アーム先端部材212と左第2アーム基端部材221の結節点をJ2,右第2アーム先端部材122と左第2アーム先端部材222の結節点をJ3で示してある。
【0023】
次に、ピッチ運動させたときについて説明する。
図8は手先を、ピッチ運動により、中立状態から腕に対して上向きに傾斜させたときの装置を側方から見た図であり、図9は手先を、ピッチ運動により、中立状態から腕に対して下向きに傾斜させたときの装置を側方から見た図である。図10は図8の状態における4つのアームのリンク結合の様子を図7と同様に模式的に示したものであり、図11は図9の状態における4つのアームのリンク結合の様子を図7と同様に模式的に示したものである。
【0024】
次に、ヨー運動させたときについて説明する。
図12は手先を、ヨー運動により、中立状態から腕に対して内向きに傾斜させたときの装置を側方から見た図であり、図13は手先を、ヨー運動により、中立状態から腕に対して内向きに傾斜させたときの装置を側方から見た図である。図14は図12の状態における4つのアームのリンク結合の様子を図7と同様に模式的に示したものであり、図15は図13の状態における4つのアームのリンク結合の様子を図7と同様に模式的に示したものである。
【0025】
次に、ロール運動させたときについて説明する。
図16はロール運動により、中立状態から、手の甲が上になるように腕を捻ったときの装置を側方から見た図であり、図17は上方から見た図である。同様に、図18はロール運動により、中立状態から、手の甲が下になるように腕を捻ったときの装置を側方から見た図であり、図19は上方から見た図である。
【0026】
次に、指先の動きの検出、力覚付与をおこなうための指従動リンク機構400について説明するが、それに関して図20に、手先部分の骨、関節の名称を記載した。
図21は指従動リンク機構400の構成、作動を説明する図であって、(A)は第2指がほぼまっすぐに伸びている状態を示し、(C)は第2指と第1指で物を掴める状態を示し、(B)はその中間の状態を示している。
【0027】
指従動リンク機構400は順次リンク連結されている第1指レバー410、第2指レバー420、第3指レバー430を有している。第1指レバー410と第2指レバー420は第1連結部415で連結され、第2指レバー420と第3指レバー430は第2連結部425で連結されている。
そして、第1指レバー410の始端側は上部メカボックス300に固定されている第1固定部405に回動自在に取り付けられている。第3指レバー430の終端側は第3連結部435で上部メカボックス300に固定されている第2固定部445からのびるクランクアーム440と回動自在に連結されている。
【0028】
第1指レバー410は第2指(ひとさし指)の基節骨部分の親指側の側面に添接され、第2指レバー420は第2指の中節骨、末節骨の部分の内側(手のひら側)の面に沿って延伸する。第2指レバー420を面ファスナー等を用いて指に係止することも可能である。
【0029】
使用時には、第1固定部405は概ね第2指のMP関節部に位置する。そして、第1指レバー410と第2指レバー420を連結する第1連結部415が第2指のPIP関節にくるように第1指レバー410、第2指レバー420の長さが選択されるが、好ましくは長さが調節可能にされる。クランクアーム440は第2固定部445を介して指先制御モータ450と連結されている。
【0030】
図22は上部メカボックス300のカバーを外して内部を説明する図である。
(A)、(B)、(C)いずれもニュートラルな状態のものであるが、(A)は斜め上方から見た図、(B)は上から見た図、(C)は側方から見た図である。
指従動リンク機構400の第1固定部405は上部メカボックス300のベース板301を貫通して上部メカボックス300の内部に延伸しており、そこでバネ406によって上から見て時計回り方向に付勢されている。
【0031】
指従動リンク機構400の第2固定部445は上部メカボックス300のベース板301を貫通して上部メカボックス300の内部に延伸しており指先制御モータ450と連結されている。また、バネ446によって上から見て時計回り方向に付勢されている。
指先制御モータ450の内部には図示しないが、第4指レバー440の基準角度位置に対する角度変移量(ロール角)を検出できる角度検出センサ、負荷を検出する負荷検出センサが取り付けられている。
【0032】
以下、ピッチ角、ヨー角、ロール角の検出について説明する。
まず、図23に示すように、各結節点、角度を以下のように定義する。
J0:右第1アーム110と左第1アーム210の結節点
J1:右第1アーム110と右第2アーム120の結節点
J2:左第1アーム210と左第2アーム220の結節点
J3:右第2アーム120と左第2アーム220の結節点
また、右第1アーム110のX軸から半時計周りに計測した角度をαと定義し、左第1アーム210のX軸から半時計周りに計測した角度をβと定義する。
【0033】
先ず、ヨー角θyについて説明する。
ヨー角θYは図1のZ方向から見たときのJ3の角度である。そして、J3は右第1アーム110、左第1アーム210の角度に係らず常にαとβの二等分線上にある。(図24参照)。したがって、以下の関係を有する。
ヨー角θy=(α+β)/2
【0034】
次に、ピッチ角θpについて説明する。
図25の(A)はJ0、J3を通る球面リンクをY方向から見た図である。
J3の座標X3、Z3は以下のように表される。
X3(α、β)=(R2−(Z3−R)2)1/2
Z3(α、β)=(A±B)/4(D2+E2)
そして、ピッチ角θpは以下のように表される。
θp=tan-1(X3(α、β)/(R−Z3(α、β))
【0035】
ここで、
R:球面リンクの回転半径
L1:J0とJ1(J2)の間の直線距離
L2:J1(J2)とJ3の間の直線距離
D=R−L1V
E=L1H・cos((β−α)/2)
A=−2(F×D−2R×E2))
B=2×E×(4R2×E2−(F2+4R×F×D))1/2 であって、
また、図25の(B)に示されるように、
L1V:J0とJ1(J2)の間の垂直直線距離
L1H:J0とJ1(J2)の間の水平直線距離
であり、また、
F=L12−L22 である。
【0036】
次にロール角θrの検出について説明する。
前述したように上部メカボックス300内のロールモータ340には上部メカボックス300の基準角度位置に対する角度変移量(ロール角)を検出できる角度検出センサが設けられている。この角度検出センサは左第2アーム先端部材222に固定された軸230の周面上の基準位置に対する角度を検出するものである。しかし、この軸230の周面上の基準位置はピッチ変移していると移動してしまう。
【0037】
図26の(A)が上記を説明する図である。
θrが絶対座標系における上部メカボックス300の傾きである。軸230がγだけ傾いていることを示し、角度検出センサが検出したδはγの値を含んでいる。
したがって、θr=δ−γという補正をおこなう必要がある。
【0038】
以下、上記の補正について説明する。
図26の(A)はロール軸方向から右第2アーム120と左第2アーム220のリンク連結部を見たものである。
γ=sin-1(Lr/L2H)
L2Hは図26(B)に示されるものである。
図26(C)はLrを説明する図であって、LrはZ方向から見た場合のL1H(図25(B)参照)にsin((β−α)/2)を乗じた値に等しい。
したがって、γ=sin-1((L1H・sin((β−α)/2)/L2H)である。
よって、θr=δ−sin-1((L1H・sin((β−α)/2)/L2H)
【0039】
上記の補正は、軸230がピッチ変移にともなって絶対座標系上では回転してしまうことによって発生する。そこで、変形例として、基準角度位置が回転しないようにした変形例を2つ説明する。一方は、リンク機構を用いたものであり、他方は歯車を利用したものである。
【0040】
図27はリンク機構を用いた第1の変形例を示す図であって、(A)は全体図、(B)は分解組み立て図である。互いにリンク連結されている右第2アーム120、左第2アーム220の先に、互いに等長な右第2アーム第1延長部130、左第2アーム延長部230が延長されている。右第2アーム第1延長部130、左第2アーム第1延長部230の先には、さらに、それぞれ等長な右第2アーム第2延長部140、左第2アーム第2延長部240がリンク連結されている。右第2アーム第2延長部140の先端と左第2アーム第2延長部240の先端が先端軸365を介してリンク連結されている。
【0041】
一方、参照符号360で示されるのは上部メカボックス結合軸310を保持するするとともにロール角の基準角度位置を生成するための基準角度位置生成部材である。基準角度位置生成部材360は円形の基部361と基部361に一体に形成された突出部362からなり、基部361の中央には穴363が形成され、突出部362には長穴364が形成されている。基部361にはベルト342が係合されるプーリ365が固定されている。ベルト342は図2で示したものと同じであり、プーリ341と係合している。
【0042】
穴363には上部メカボックス結合軸310が相互回動可能に配置されている。一方、長穴364には先端軸が係合せしめられる。上部メカボックス結合軸310には上部メカボックス300が回動可能に取り付けられている。また、上部メカボックス結合軸310は右第2アーム120と左第2アーム220の先端のリンク連結ための軸としても利用されている。
【0043】
上記のような構成により基準角度位置生成部材360は絶対座標において回動せず常に一定の姿勢を保っている。このように一定の姿勢を保つ基準角度位置生成部材360に基準角度位置を設定することにより前述のように検出された上部メカボックス300の角度位置を修正する必要がない。
なお、グリップ500は図2に示されるように上部メカボックス300の下面に取り付けるのではなくて、上部メカボックス300の下方延長部に取り付けられている。
【0044】
図28は歯車を用いた第2の変形例を示す図であって、(A)は全体図、(B)は分解組み立て図である。
互いにリンク連結されている右第2アーム120、左第2アーム220の先端部分に半月形の右先端歯車150、左先端歯車250が付設されている。参照符号370で示されるのは上部メカボックス結合軸を保持するするするとともにロール角の姿勢の基準角度位置を生成するための基準角度位置生成部材である。基準角度位置生成部材370には右先端歯車150と噛合う右歯車371と左先端歯車250と噛合う左歯車372が固定されていて、右歯車371と左歯車372は相互に噛合っている。
【0045】
基準角度位置生成部材370の中央には穴373が形成され、また、ベルト342が係合されるプーリ365が固定されている。ベルト342は図2で示したものと同じであり、プーリ341と係合している。
穴373には上部メカボックス結合軸310が相互回動可能に配置されている。上部メカボックス結合軸310には上部メカボックス300が回動不能に取り付けられている。また、上部メカボックス結合軸310は右第2アーム120と左第2アーム220の先端のリンク連結ための軸としても利用されている。
【0046】
上記のような構成により基準角度位置生成部材370には右先端歯車150、左先端歯車250は常に逆方向の回転しか許容しないため、基準角度位置生成部材は回転しない。したがって、絶対座標において回動せず常に一定の姿勢を保っている。このように一定の姿勢を保つ基準角度位置生成部材370に基準角度位置を設定することにより前述のように検出された上部メカボックス300の角度位置を修正する必要がない。
【0047】
次に、指従動リンク機構400の第2レバー420の先端(ひとさし指の先端部)の第2連結部425の位置の検出について説明する。
第1指レバー410は固定されていないが第1レバー410の自由端にある第1固定部405は概ね第2指のMP関節部にあるようにされる。したがって、第1固定部405の位置はほぼ固定されている。したがって、第1固定部405、第2固定部445が固定された5節リンク機構を形成していることになる。
したがって、上部メカボックス300内の指先制御モータ450の角度検出センサが検出する基準角度位置からの変移量を測定することにより第2連結部425の第2固定部445に対する位置をもとめることができる。
【0048】
右アームモータ115、左アームモータ215、ロールモータ340、および、指先制御モータ450に設けられた角度検出センサの検出した信号は、図示しない、適切な、有線または無線の伝達手段によりロボット等の操縦対象に伝達され、伝達された信号にもとづきロボット等の操縦対象の対応する部位が動いて所望の操作が行われる。
ここで、ロボット等の操縦対象が何らかの対象物に接触し反力を受けるとその反力はロボット等の操縦対象にあらかじめ備えられたセンサにより検出され、その信号が本発明の操縦装置に伝達される。
すると、伝達された信号にもとづいて右アームモータ115、左アームモータ215、ロールモータ340、指先制御モータ450等の駆動装置が作動せしめられてオペレータに力覚が与えられるが、その際に力覚が目標値になるように駆動装置にはその力に相当する電流が供給される。より正確な力覚を与える場合には、ここに負荷検出センサを設けてもよい。なお、力覚はあらかじめ定めた倍力比によりロボットが検出した力に対して倍力されるが、倍力比は1より小さい場合もあれば、1より大きい場合もある。
上記のような信号の送受、倍力比の設定、および、前述したロール角の検出値の補正等のために下部メカボックス100または上部メカボックス300内に、図示しないが制御装置が設けられている。
【産業上の利用可能性】
【0049】
本発明はロボットや仮想現実下の操縦対象を遠隔操縦するための遠隔操縦装置であり、遠隔操縦をおこなうロボットや仮想現実を利用するアミューズメント装置等に広く適用できる。
【符号の説明】
【0050】
100 下部メカボックス
110 右第1アーム
111 右第1アーム基端部材
112 右第1アーム先端部材
120 右第2アーム
121 右第2アーム基端部材
122 右第2アーム先端部材
210 左第1アーム
211 左第1アーム基端部材
212 左第1アーム先端部材
220 左第2アーム
221 左第2アーム基端部材
222 左第2アーム先端部材
300 上部メカボックス
310 上部メカボックス結合軸
340 ロールモータ
360 基準角度位置生成部材
370 基準角度位置生成部材
400 指先動き検出装置
405 第1固定部、
410 第1指レバー
415 第1連結部
420 第2指レバー
425 第2連結部
430 第3指レバー
435 第3連結部
440 クランクアーム
445 第2固定部
450 指先制御モータ
500 グリップ
【特許請求の範囲】
【請求項1】
操縦対象を遠隔操縦するための遠隔操縦装置であって、
それぞれ円弧状の右第1アームと右第2アームと、それぞれ円弧状の左第1アームと左第2アームと、を具備し、
右第1アームの基端と左第1アームの基端とが下部軸線まわりを回動可能にリンク連結されて下部メカボックスに同軸に取り付けられ、下部メカボックスには右第1アームの角度位置を検出する右第1アーム角度位置検出手段と、左第1アームの角度位置を検出する左第1アーム角度位置検出手段と、が備えられ、
右第1アームの先端に右第2アームの基部がそれぞれ右アーム連結軸線まわりを回動可能にリンク連結され、左第1アームの先端に左第2アームの基部がそれぞれ左アーム連結軸線まわりを回動可能にリンク連結され、
右第2アームの先端と左第2アームの先端が上部結合軸を介してリンク連結され、上部結合軸に対して上部メカボックスが上部結合軸の回りを回転できるように取り付けられていて、上部メカボックスにはオペレータが握るためのグリップが取り付けられ、
上部メカボックスには上部メカボックスの基準角度位置に対する角度位置の検出をする上部メカボックス角度位置検出手段と、少なくとも1つの指の動きに従動する指従動リンク機構と、指従動リンク機構の一部のリンクの角度位置の検出をする指従動リンク角度位置検出手段が取り付けられており、
右第1アーム角度位置検出手段、左第1アーム角度位置検出手段、上部メカボックス角度位置検出手段、および、指従動リンク角度位置検出手段の検出値にもとづき、オペレータの手先の姿勢、および、指先の情報をロボットに送ることができ、
上部結合軸の軸線と、下部軸線と、右アーム連結軸線と、左アーム連結軸線とのすべてが、手首の3自由度回転の回転中心の近傍の1点において交わる球座標構造を形成するように、右第1アーム、右第2アーム、左第1アーム、左第2アーム、および、各リンク連結が設定されていて、前記グリップが前記球座標構造の略中心に位置せしめられている、
ことを特徴とする遠隔操縦装置。
【請求項2】
上部メカボックスの角度位置の検出をするための基準角度位置を生成する基準角度位置生成手段を具備する、ことを特徴とする請求項1に記載の遠隔操縦装置。
【請求項3】
上部結合軸が右第2アームの先端または左第2アームの先端に対して固定されていて、基準角度位置生成手段は、上部メカボックスの角度位置の計算時に該右第2アームの先端または左第2アームの先端に対して固定された上部結合軸の外周上の予め定めた位置から計測した角度位置を、右第1アームと左第2アームの角度位置にもとづき修正する修正手段である、
ことを特徴とする請求項2に記載の遠隔操縦装置。
【請求項4】
基準角度位置生成手段は、右第2アームの先端に固定された右先端歯車および左第2アームの先端に固定された左先端歯車と、上部結合軸に対して回転可能に取り付けられた円板と、該円板に回転可能に取り付けられ右先端歯車と係合する右係合歯車および左先端歯車と係合する左係合歯車とを具備し、右先端歯車と左先端歯車とを互いに係合せしめてする、前記円板を姿勢一定に保持してなり、該姿勢一定に保持された円板に基準角度位置が設定される、ことを特徴とする請求項3に記載の遠隔操縦装置。
【請求項5】
基準角度位置生成手段は、右第2アームの先端および左第2アームの先端から延長された互いに等長の右第1延長部および左第1延長部と、基部が右第1延長部と左第1延長部のそれぞれの先端にリンク連結され、先端部が先端軸を介して互いにリンク連結されている、右第2延長部と左第2延長部と、に対して回転可能に取り付けられた円板と、該円板に固定され前記先端軸が係合する長穴と、を具備し、前記円板を姿勢一定に保持してなり、該姿勢一定に保持された円板に基準角度位置が設定される、ことを特徴とする請求項2に記載の遠隔操縦装置。
【請求項6】
指従動リンク機構は、2つの連結軸で連結された3つのリンク片を具備し、連結された3つのリンク片の一端が上部メカボックスに固定された第1固定部に回動自在に連結され、他端が上部メカボックスに固定された第2固定部に取り付けられたクランクアームの先端に回動自在に取り付けられ、第1固定部が指のMP関節部に、第1固定部に回動自在に連結されているリンク片の反第1固定部側の端部が指のPIP関節部に合うようにリンク片の長さが選択され、
クランクアームが取り付けられている回転軸は第2固定部を介して角度検出手段に連結されていて、検出されたアームの角度位置にもとづき、指の開閉を検出する、
ことを特徴とする請求項1に記載の遠隔操縦装置。
【請求項7】
指従動リンク機構は、指の開き側と閉じ側の動きに追従可能な指開閉追従手段を含む、ことを特徴とする請求項6に記載の遠隔操縦装置。
【請求項8】
指開閉追従手段は、前記3つのリンク片のうちの中間のリンク片を指の末節骨、中節骨部分に密着せしめる密着手段である、ことを特徴とする請求項7に記載の遠隔操縦装置。
【請求項9】
指開閉追従手段は、前記第1固定部および第2固定部に設けられ3つのリンク片の一端と他端に付勢力を与える一対の付勢手段である、ことを特徴とする請求項7に記載の遠隔操縦装置。
【請求項10】
右第1アーム角度位置検出手段の検出した右第1アーム角度位置と、左第1アーム角度位置検出手段の検出した左第1アーム角度位置とにもとづき、オペレータの手先のヨー変移、ピッチ変移を検出し、上部メカボックス角度位置検出手段の検出した上部メカボックス角度位置にもとづきオペレータの手先のロール変移を検出する、ことを特徴とする請求項1から9のいずれか一項に記載の遠隔操縦装置。
【請求項11】
ロボットが反力を受けたときにその反力に応じた力覚をオペレータに与えるために駆動装置を備える、ことを特徴とする請求項1から10のいずれか一項に記載の遠隔操縦装置。
【請求項1】
操縦対象を遠隔操縦するための遠隔操縦装置であって、
それぞれ円弧状の右第1アームと右第2アームと、それぞれ円弧状の左第1アームと左第2アームと、を具備し、
右第1アームの基端と左第1アームの基端とが下部軸線まわりを回動可能にリンク連結されて下部メカボックスに同軸に取り付けられ、下部メカボックスには右第1アームの角度位置を検出する右第1アーム角度位置検出手段と、左第1アームの角度位置を検出する左第1アーム角度位置検出手段と、が備えられ、
右第1アームの先端に右第2アームの基部がそれぞれ右アーム連結軸線まわりを回動可能にリンク連結され、左第1アームの先端に左第2アームの基部がそれぞれ左アーム連結軸線まわりを回動可能にリンク連結され、
右第2アームの先端と左第2アームの先端が上部結合軸を介してリンク連結され、上部結合軸に対して上部メカボックスが上部結合軸の回りを回転できるように取り付けられていて、上部メカボックスにはオペレータが握るためのグリップが取り付けられ、
上部メカボックスには上部メカボックスの基準角度位置に対する角度位置の検出をする上部メカボックス角度位置検出手段と、少なくとも1つの指の動きに従動する指従動リンク機構と、指従動リンク機構の一部のリンクの角度位置の検出をする指従動リンク角度位置検出手段が取り付けられており、
右第1アーム角度位置検出手段、左第1アーム角度位置検出手段、上部メカボックス角度位置検出手段、および、指従動リンク角度位置検出手段の検出値にもとづき、オペレータの手先の姿勢、および、指先の情報をロボットに送ることができ、
上部結合軸の軸線と、下部軸線と、右アーム連結軸線と、左アーム連結軸線とのすべてが、手首の3自由度回転の回転中心の近傍の1点において交わる球座標構造を形成するように、右第1アーム、右第2アーム、左第1アーム、左第2アーム、および、各リンク連結が設定されていて、前記グリップが前記球座標構造の略中心に位置せしめられている、
ことを特徴とする遠隔操縦装置。
【請求項2】
上部メカボックスの角度位置の検出をするための基準角度位置を生成する基準角度位置生成手段を具備する、ことを特徴とする請求項1に記載の遠隔操縦装置。
【請求項3】
上部結合軸が右第2アームの先端または左第2アームの先端に対して固定されていて、基準角度位置生成手段は、上部メカボックスの角度位置の計算時に該右第2アームの先端または左第2アームの先端に対して固定された上部結合軸の外周上の予め定めた位置から計測した角度位置を、右第1アームと左第2アームの角度位置にもとづき修正する修正手段である、
ことを特徴とする請求項2に記載の遠隔操縦装置。
【請求項4】
基準角度位置生成手段は、右第2アームの先端に固定された右先端歯車および左第2アームの先端に固定された左先端歯車と、上部結合軸に対して回転可能に取り付けられた円板と、該円板に回転可能に取り付けられ右先端歯車と係合する右係合歯車および左先端歯車と係合する左係合歯車とを具備し、右先端歯車と左先端歯車とを互いに係合せしめてする、前記円板を姿勢一定に保持してなり、該姿勢一定に保持された円板に基準角度位置が設定される、ことを特徴とする請求項3に記載の遠隔操縦装置。
【請求項5】
基準角度位置生成手段は、右第2アームの先端および左第2アームの先端から延長された互いに等長の右第1延長部および左第1延長部と、基部が右第1延長部と左第1延長部のそれぞれの先端にリンク連結され、先端部が先端軸を介して互いにリンク連結されている、右第2延長部と左第2延長部と、に対して回転可能に取り付けられた円板と、該円板に固定され前記先端軸が係合する長穴と、を具備し、前記円板を姿勢一定に保持してなり、該姿勢一定に保持された円板に基準角度位置が設定される、ことを特徴とする請求項2に記載の遠隔操縦装置。
【請求項6】
指従動リンク機構は、2つの連結軸で連結された3つのリンク片を具備し、連結された3つのリンク片の一端が上部メカボックスに固定された第1固定部に回動自在に連結され、他端が上部メカボックスに固定された第2固定部に取り付けられたクランクアームの先端に回動自在に取り付けられ、第1固定部が指のMP関節部に、第1固定部に回動自在に連結されているリンク片の反第1固定部側の端部が指のPIP関節部に合うようにリンク片の長さが選択され、
クランクアームが取り付けられている回転軸は第2固定部を介して角度検出手段に連結されていて、検出されたアームの角度位置にもとづき、指の開閉を検出する、
ことを特徴とする請求項1に記載の遠隔操縦装置。
【請求項7】
指従動リンク機構は、指の開き側と閉じ側の動きに追従可能な指開閉追従手段を含む、ことを特徴とする請求項6に記載の遠隔操縦装置。
【請求項8】
指開閉追従手段は、前記3つのリンク片のうちの中間のリンク片を指の末節骨、中節骨部分に密着せしめる密着手段である、ことを特徴とする請求項7に記載の遠隔操縦装置。
【請求項9】
指開閉追従手段は、前記第1固定部および第2固定部に設けられ3つのリンク片の一端と他端に付勢力を与える一対の付勢手段である、ことを特徴とする請求項7に記載の遠隔操縦装置。
【請求項10】
右第1アーム角度位置検出手段の検出した右第1アーム角度位置と、左第1アーム角度位置検出手段の検出した左第1アーム角度位置とにもとづき、オペレータの手先のヨー変移、ピッチ変移を検出し、上部メカボックス角度位置検出手段の検出した上部メカボックス角度位置にもとづきオペレータの手先のロール変移を検出する、ことを特徴とする請求項1から9のいずれか一項に記載の遠隔操縦装置。
【請求項11】
ロボットが反力を受けたときにその反力に応じた力覚をオペレータに与えるために駆動装置を備える、ことを特徴とする請求項1から10のいずれか一項に記載の遠隔操縦装置。
【図1】



【図2】
【図3】
【図4】
【図5】

【図6】

【図7】
【図8】
【図9】

【図10】
【図11】

【図12】
【図13】
【図14】

【図15】
【図16】
【図17】
【図18】

【図19】
【図20】
【図21】
【図22】
【図23】

【図24】
【図25】
【図26】
【図27】
【図28】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【公開番号】特開2013−49121(P2013−49121A)
【公開日】平成25年3月14日(2013.3.14)
【国際特許分類】
【出願番号】特願2011−189163(P2011−189163)
【出願日】平成23年8月31日(2011.8.31)
【出願人】(304021417)国立大学法人東京工業大学 (1,821)
【Fターム(参考)】
【公開日】平成25年3月14日(2013.3.14)
【国際特許分類】
【出願日】平成23年8月31日(2011.8.31)
【出願人】(304021417)国立大学法人東京工業大学 (1,821)
【Fターム(参考)】
[ Back to top ]