
飛翔体の着陸装置
【課題】多数の飛翔体を、限定された面積の中で安全に着陸させる飛翔体の着陸装置を提供すること。
【解決手段】着陸装置は、飛翔体を着脱自在な着脱装置を備えた飛翔体着陸用のデッキ54と、一定の周回軌道上でデッキ54を所定の方向に移動させる推進装置とを含み、デッキの所定位置には、飛翔体からの光を反射して飛翔体を誘導するパッシブ誘導装置86が設けられる。パッシブ誘導装置86は、デッキ54の基準面に対してそれぞれ所定の関係を持つように配置された複数個の直角レフレクタ130,132及び134を含み、各々は、稜線を形成するように直角に組合された2つの反射面を有し、それぞれの稜線と基準面とのなす角度が互いに異なるように基板110に取付けられる。
【解決手段】着陸装置は、飛翔体を着脱自在な着脱装置を備えた飛翔体着陸用のデッキ54と、一定の周回軌道上でデッキ54を所定の方向に移動させる推進装置とを含み、デッキの所定位置には、飛翔体からの光を反射して飛翔体を誘導するパッシブ誘導装置86が設けられる。パッシブ誘導装置86は、デッキ54の基準面に対してそれぞれ所定の関係を持つように配置された複数個の直角レフレクタ130,132及び134を含み、各々は、稜線を形成するように直角に組合された2つの反射面を有し、それぞれの稜線と基準面とのなす角度が互いに異なるように基板110に取付けられる。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、飛行機などの飛翔体の着陸のための装置に関し、特に、多数の飛翔体を安全かつ効率的に着陸させるための着陸装置に関する。
【背景技術】
【0002】
近年のロボット技術及び飛行制御技術の開発及び運用の急速な進展に伴い、最近、多くの国でUAV(Unmanned Air Vehicle)と呼ばれる、無人飛行機の研究、開発及び実用化に向けての積極的な活動が進行している。米国DARPA(Defense Advanced Research Project Agency)の研究開発、日本の防衛省の超小型偵察機の開発、複数の企業によるUAVの研究開発、及びビジネスへの応用などが刺激となって、多くの学会でも、この分野に関連する技術の紹介、研究、及び開発を紹介した記事を見ることが出来る。
【0003】
例えば、比較的小型のUAVを施設の周辺に飛ばし、搭載したカメラで周囲を監視させる技術などが開発されている。UAVに物流を担わせることも可能であろう。UAVには人間が登場する必要はないため、コストがそれほどかからないこともあって、今後UAVが普及する可能性は高い。
【0004】
しかし、そうしたUAV普及のネックは地上設備である。UAVの離陸及び着陸を担う空港とその設備とに関しては、研究はそれほど進んでいない。既存の国際空港及び地方空港をはじめとする、民間航空輸送システムを担う空港の能力については、依然として長期展望が未だに開けていない様子である。今後、UAVの利用が多くなる場合、既存の空港に頼った運用を行なうことは不可能であろう。大量のUAVを利用した物流、監視及びモニタ、災害防止のための空撮などの需要が将来発生したときに、都市近郊又は災害地域などでUAVを有効に利用できるかどうかは心許ない状況である。特に、UAVの利点を生かして、人間の手をできるだけ必要としないような形でUAVが離陸及び着陸できるようにすることが望ましい。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開昭47-17198号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
UAVの発射又は離陸に関しては、現在のところ「手投げ」方式が主流である。手投げ方式は、飛行場のような広い土地が不要なため便利ではあるが、多数のUAVを自動的に運用する際には利用できない。着陸方式としては、気球を利用してゆっくりと落下させたり、低空を低速度で飛ばしながら推力を切って、無理やりに落下させたりする方式が行なわれている。しかしこのような方式はいずれも、自動的に大量のUAVの着陸を行なわせるには不適当な方法である。
【0007】
こうした問題に対処するため、広い土地を準備して、通常の民間飛行機と同様、滑走路を使用した離陸及び着陸をさせることも考えられる。しかし、極めて多くのUAVを絶え間なく離陸させ、着陸させることに対応する空港設備を設けることは、費用面から言っても、保守の作業量という面から見ても、これまでの発想では不可能に近い。したがって、ビジネスとして、UAVを大量に発射及び着陸させることができるシステム(自動誘導、ガイド、混雑回避、衝突回避などを含め)が必要になると考えられる。
【0008】
こうした問題は解決するための一つの方策として、回転するウィングの先端にデッキを設け、このデッキに航空機を着陸させる航空機の離着設備が、特許文献1に開示されている。特許文献1に開示の航空機の離着設備では、ウィングを回転させながら航空機をデッキに着陸させ、そのまま回転を続けながら給油などを行なって再度デッキから離陸させる。ウィングが回転を続けているため、離陸も容易に行なえるという特徴がある。こうした構成であれば、広い土地を用いなくとも多数の航空機を連続して着陸させたり離陸させたりすることができる。
【0009】
しかし、特許文献1では、航空機は、管制塔からの指示にしたがって操縦士が操縦することになっている。UAVのような無人の飛翔体ではそのような前提条件が充足されない。無線を使用して多数のUAVの離陸又は着陸を誘導しようとする場合、チャンネルが限定されるため、安全に誘導が行なえないという問題がある。特に、離陸と異なり着陸の際には、飛翔体とデッキとを共に移動させながら飛翔体をデッキに誘導しなければならず、上記した問題が顕著に現れる。
【0010】
それゆえに本発明の目的は、多数の飛翔体を、限定された面積の中で安全に着陸させる飛翔体の着陸装置を提供することである。
【課題を解決するための手段】
【0011】
本発明の第1の局面に係る着陸装置は、飛翔体を着陸させるための着陸装置であって、飛翔体を着脱自在な着脱装置を備えた飛翔体着陸用のデッキと、一定の周回軌道上でデッキを所定の方向に移動させるための駆動手段とを含み、デッキの、予め定められる位置には、飛翔体からの光を反射することにより飛翔体を誘導するパッシブ誘導装置が設けられている。
【0012】
駆動手段は、一定の周回軌道上でデッキを所定の方向に移動させる。このデッキに着陸しようとする飛翔体は、デッキに向けて光を照射する。光を受けたパッシブ誘導装置は、この光を反射する。この反射光により、デッキに着陸しようとする飛翔体が誘導される。
【0013】
誘導に光を用いるので、複数の飛翔体がデッキに着陸しようとするときに、電波と異なり混乱が生じる可能性は小さい。デッキが移動するときにも飛翔体を自動的にデッキ上に着陸させることができる。移動するデッキに飛翔体を着陸させるために、飛翔体の速度を大きく減速させる必要がない。したがって既存の空港のような長い滑走路は不要になる。
【0014】
その結果、多数の航空機を、限定された面積の中で安全に着陸させる飛翔体の着陸装置を提供することができる。
【0015】
好ましくは、パッシブ誘導装置は、デッキの姿勢により定められる基準面に対してそれぞれ所定の関係を持つように配置された複数個の直角レフレクタと、複数個の直角レフレクタが取付けられる基板とを含み、複数個の直角レフレクタの各々は、稜線を形成するように、かつ互いの間に直角が形成されるように組合された2つの反射面を有し、複数個の直角レフレクタは、それぞれの稜線と基準面とのなす角度が互いに異なるように基板に取付けられている。
【0016】
直角レフレクタは、それぞれの稜線と基準面とのなす角度が互いに異なるように基板に取付けられる。飛翔体がデッキにアプローチするときに、降下角度の変化に応じ、異なる直角レフレクタからの反射光が飛翔体に戻る。この反射光によって、基準面に対する飛翔体の進入角度が変化したことを知ることができる。
【0017】
より好ましくは、複数個の直角レフレクタは、第1、第2及び第3の直角レフレクタを含む。
【0018】
さらに好ましくは、第1の直角レフレクタの稜線が基準面となす角度と、第2の直角レフレクタが基準面となす角度との差と、第2の直角レフレクタの稜線が基準面となす角度と、第3の直角レフレクタが基準面となす角度との差が互いに等しい。
【0019】
第1、第2及び第3の直角レフレクタの少なくとも一部には、第1、第2及び第3の直角レフレクタからの反射光の色が互いに異なるようなフィルタが設けられていてもよい。
【0020】
異なる直角レフレクタからの反射光の色が互いに異なる。飛翔体において反射光の色を判別することにより、基準面への飛翔体の降下角度を知ることができる。そのため、飛翔体は安全にデッキにアプローチすることができる。
【0021】
パッシブ誘導装置はさらに、複数個の直角レフレクタに隣接して設けられた再帰反射装置を含む。
【0022】
再帰反射装置は、広い範囲からの入射光を、その入射光方向と平行な方向に反射する。飛翔体が光を照射したときに、再帰反射装置からの反射光を検知することで、デッキの大まかな方向を知ることができ、正しい進入路に飛翔体のコースを制御することが可能になる。さらに、飛翔体から照射された光が再帰反射装置により反射されて飛翔体に戻るまでの時間を測定することで、飛翔体からデッキまでの距離を知ることができる。その結果、飛翔体をデッキまで安全に誘導することが可能になる。
【0023】
好ましくは、複数個の直角レフレクタは、基準面と平行な一直線上に配置されている。
【0024】
さらに好ましくは、パッシブ誘導装置はさらに、一直線上に配置されている複数個の直角レフレクタの両端の外側にそれぞれ設けられた、第1及び第2の再帰反射板と、それぞれ第1及び第2の再帰反射板の再帰反射面上に設けられ、それぞれ基準面に対して互いに異なる角度を形成する偏光面を有する第1及び第2の偏光板とを含む。
【0025】
このような偏光板と再帰反射板とを設けることにより、飛翔体と偏光面との間の角度、したがって飛翔体と基準面との間の相対的なローリング角を知ることができる。さらに、第1及び第2の再帰反射板及び偏光板が、複数の直角レフレクタの両端より外側に配置されているため、上記した角度の測定を正確に行なうことができる。
【図面の簡単な説明】
【0026】
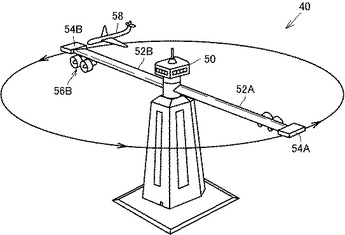
【図1】本発明の一実施の形態に係る一層式ロータリー空港の概略を示す斜視図である。
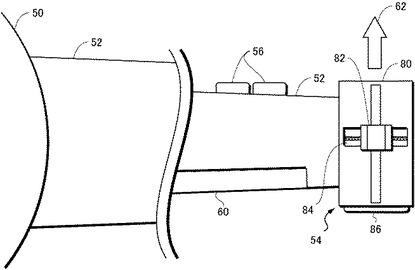
【図2】図1に示すロータリー空港のウィング52とその先端に設けられたデッキ54との平面図である。
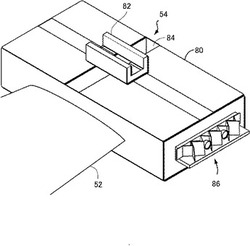
【図3】図2に示すデッキ54の斜視図である。
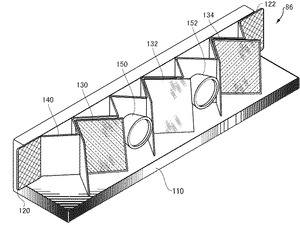
【図4】デッキ54の後端面に設けられるパッシブ誘導・ガイド装置86の斜視図である。
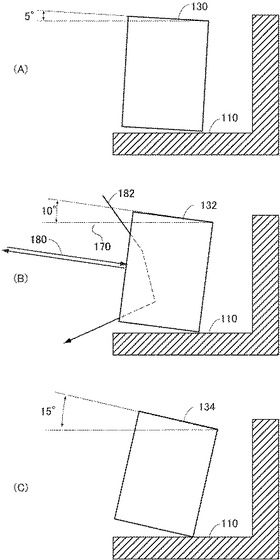
【図5】パッシブ誘導・ガイド装置86が持つ3種の直角レフレクタ130,132及び134の傾きを説明するための図である。
【図6】パッシブ誘導・ガイド装置86を用いた、デッキ54に進入するUAV230の誘導方式を説明するための図である。
【図7】本発明の実施の形態に係る多層式ロータリー空港の概略を示す斜視図である。
【発明を実施するための形態】
【0027】
以下の図面及び説明において、同一部品には同一の参照符号を付してある。それらの名称及び機能も同一である。したがって、それらについての詳細な説明は繰返さない。
【0028】
図1を参照して、本発明の飛翔体の着陸装置の一実施の形態に係るロータリー空港40は、一層式のロータリー空港であって、地上に設置された中央デッキ50と、中央デッキ50を中心軸としてその周囲を回転可能なように中央デッキ50に結合された、翼型断面の2つのウィング52A及び52B(このようなウィングを総称して単にウィング52と呼ぶ。)と、ウィング52A及びウィング52Bの先端上にそれぞれ設けられ、離陸時及び着陸時にUAV58をリリースしたり、ホールドしたりする機構を備えたデッキ54A及び54B(このようなデッキを総称してデッキ54と呼ぶ。)とを含む。ウィング52は中央デッキ50に装着された、中央デッキ50の周囲を回転可能なリング(図示せず)に、ピン接続で取付けられている。ただし、この接続はピン接続でなく、固定されていてもよい。
【0029】
ロータリー空港40はさらに、それぞれウィング52A及び52Bの下面に固定された、ダクテッドファンからなる推進装置56A及び56B(このような推進装置を総称して推進装置56と呼ぶ。)を含む。ウィング52はそれほど高速で回転させる必要はないので、推進装置56としては低速でもできるだけ経済的なものを用いるのが好ましい。本実施の形態では、推進装置56として電動型のダクテッドファンを使用する。
【0030】
図2を参照して、ウィング52は、図示しないリングなどを介して中央デッキ50に固定されている。ウィング52の先端近くの後縁部には、ウィング52の揚力を調整するためのフラップ60が設けられている。ウィング52の断面を翼型としておくことで、推進装置56による推進力でウィング52が中央デッキ50の周囲を矢印62により示される方向に回転すると揚力が発生する。この揚力をフラップ60で調整することにより、ウィング52の先端部分の傾きを調整することができる。推進力を絞るとウィング52の先端は下に下がる。予めウィング52が設けられている高さを適切な高さにしておくと、デッキ54を地面に安全に下ろすことができる。
【0031】
デッキ54は、平坦な直方体形状を有するプラットホーム80と、プラットホーム80の上面に設けられ、UAVを保持したりリリースしたりする機能を持つクランプ機構82と、プラットホーム80の上面でウィング52の翼幅方向(ウィング52の回転方向と直交する方向)にクランプ機構82を移動させることにより、UAVの着陸時の飛行コースとデッキ54との位置のずれを修正してクランプ機構82によるUAVの保持を容易にするための移動機構84と、プラットホーム80の後端面に設けられ、デッキ54にUAVが着陸しようとするときにUAVを誘導するための、パッシブ誘導・ガイド装置86とを含む。
【0032】
図4を参照して、パッシブ誘導・ガイド装置86は、断面L字型の、基板としてのブロック110と、ブロック110上に、いずれもほぼ同じ方向を向くように一直線上にそろえて固定され、各々、稜線を形成するように互いに直角に組合せた2枚の反射面を持ち、所定の面に平行に入射する光のみを光源側に反射するレフレクタ(以下、このようなレフレクタを「直角レフレクタ」と呼ぶ。)130,132及び134と、直角レフレクタ130及び132の間、並びに直角レフレクタ132及び134の間にそれぞれこれらレフレクタに隣接して設けられた、UAVがデッキ54との距離を測定する際に使用する再帰レフレクタ150及び152と、直角レフレクタ130及び134の外側にそれぞれ設けられ、UAVがデッキ54の上面を基準面として相対的なローリング角を検出する際に使用する偏光板付再帰レフレクタ120及び122と、直角レフレクタ130、132、及び134、並びに再帰レフレクタ150及び152を安定して保持するよう、ブロック110に固定された支持部材140とを含む。
【0033】
偏光板付再帰レフレクタ120及び122はいずれも、再帰反射板と、偏向角が再帰反射板の長辺を基準として所定の角度をなすように再帰反射板の上に貼付された偏光板とを含む。偏光板付再帰レフレクタ120及び122には、好ましくは偏光角が異なる複数の偏光板を所定の順序で設けておく。こうすることで、偏光を用いてこれら偏光板付再帰レフレクタ120及び122をスキャンし、その反射光のパターンからデッキ54とUAVとの相対的なピッチ角を推定できる。
【0034】
直角レフレクタ130,132及び134はいずれも、稜線を形成するように互いに直角をなすように組合せた2枚の鏡面を含む。このような直角レフレクタでは、これら鏡面の双方に対して直角な面に平行な方向から入射する光は、その方向に反射される。それ以外の方向から入射する光は、別の方向に反射され、光源側には反射されない。なお、鏡面の裏面には、光を通さないような塗装がされている。
【0035】
直角レフレクタ130、132及び134は、図5(A)(B)(C)に示すように、それぞれブロック110の上面との間で5度、10度、及び15度をなすようにブロック110の上面に固定されている。したがって、ブロック110に対して進入するUAVからパッシブ誘導・ガイド装置86に向けて光を照射すると、進入角度が5度付近のときには直角レフレクタ130からの反射光のみが、10度付近の時には直角レフレクタ132からの反射光のみが、そして15度付近の時には直角レフレクタ134からの反射光のみが、それぞれUAVに戻る。このようにこれらレフレクタの角度差が互いに等しくなるようにすることで、アプローチの際の制御が容易になるという効果がある。
【0036】
一方、本実施の形態では、直角レフレクタ130の鏡面の1枚には緑のフィルタが設けられ、直角レフレクタ134の鏡面の一枚には赤のフィルタが設けられている。直角レフレクタ132の面にはフィルタは設けられていない。したがって、ブロック110に対して進入するUAVからパッシブ誘導・ガイド装置86に向けて光を照射すると、進入角度が5度付近のときには緑色の反射光が、10度付近の時には白色の反射光が、そして15度付近の時には赤色の反射光のみが、それぞれUAVから観測される。この光の色を見ることで、UAVがデッキ54に対して相対的にどのような進入角でアプローチしているかを知ることができる。
【0037】
図5(A)は直角レフレクタ130の側面図、図5(B)は直角レフレクタ132の側面図、図5(C)は直角レフレクタ134の側面図をそれぞれ示す。これら図においては、図を明快にするために、背後に存在する直角レフレクタ、再帰レフレクタ150及び152、支持部材140などは示していない。
【0038】
図5(B)を参照して、直角レフレクタ132は、その稜線(直角レフレクタ132を構成する2枚の鏡面の交線の背部に相当)がブロック110の上面に対する垂線から10度だけ、後方に傾くようにブロック110の上面に固定されている。したがって直角レフレクタ132は図5(B)に示すようにブロック110の上面に平行な方向170より10度上を向く。すなわち、直角レフレクタ132は、ブロック110の上面に平行な方向から10度上方を向いた面内で入射する光はその方向に反射するが、それ以外の方向から入射する光は光源側には反射しない。
【0039】
同様に、図5(A)を参照して、直角レフレクタ130は、その稜線がブロック110の上面に対し垂直な位置から10度だけ後方に傾くようにブロック110の上面に固定されている。その結果、直角レフレクタ130は、仰角10度の面内で入射する光についてはその方向に反射する。それ以外の方向から入射する光は別の方向に反射され、光源側には反射されない。
【0040】
図5(C)を参照して、直角レフレクタ134は、その稜線がブロック110の上面に対し垂直な位置から15度だけ後方に傾くようにブロック110の上面に固定されている。その結果、直角レフレクタ134は、仰角15度の面内で入射する光についてはその方向に反射し、それ以外の方向から入射する光は反射しない。
【0041】
例えば、図5(B)に示す、直角レフレクタ132への入射光180が仰角10度の面内で入射するものとする。すると、この光は直角レフレクタ132の2枚の反射面で反射され、光源側に反射される。一方、仰角が10度以外の面から入射する入射光182の場合、図5(B)に示すように、光源とは異なる方向に反射され、光源に戻ることはない。直角レフレクタ130及び134についても同様である。
【0042】
以上に述べたパッシブ誘導・ガイド装置100の構成についてまとめると、以下のようになる。図4を参照して、例えば直角レフレクタ132は、2つの反射面を互いに直角に組合せた稜線を有する。直角レフレクタ132は、この稜線が、ブロック110の上面に対する直交面内にあるように、かつ図4から明らかなように、2つの鏡面がこの直交面(直角レフレクタ132の中心面)を中心に面対称となるように、ブロック110の上面に固定されている。
【0043】
このように構成されたパッシブ誘導・ガイド装置100によれば、UAVを次のようにしてデッキ54に着陸させることができる。推進装置56により適切な大きさの推力を発生させると、ウィング52が回転する。この回転に伴い、ウィング52の断面が翼型であるため、ウィング52に揚力が生じ、デッキ54を適当な高さに維持することができる。デッキ54が一定の速さで回転している状態で、UAVがこのデッキ54にアプローチし、両者の相対速度がほぼ0となった時点でUAVがデッキ54の上に位置するようにUAVの速度を調整し、クランプ機構82でUAVを保持する。
【0044】
このとき、UAVは次のようにしてデッキ54にアプローチする。UAVがデッキ54にアプローチする時に、前方に向けて白色光のライトを照射する。UAVにはパッシブ誘導・ガイド装置100からの反射光が次のように見えることになる。
【0045】
図6を参照して、図4に示す偏光板付再帰レフレクタ120及び122、再帰レフレクタ150及び152はいずれも再帰反射性を持っている。したがって、UAV230がおおむねデッキ54に向かってさえいれば、例えば図6の半直線200及び202の間のような広い領域のどこにいてもデッキ54に向けて白色光を照射すると、反射光が必ずUAV230に戻ってくる。この反射光を用いて、デッキ54に対するUAV230の相対的なローリング角及び距離を測定し、デッキ54にアプローチすることができる。
【0046】
図6を参照して、UAV230がデッキ54にアプローチするときの相対的な進入(降下)角度は以下のようにして調整できる。図6に示す角度領域210、212及び214は、それぞれ、デッキ54に対する相対進入角が5度、10度、15度の近辺である領域を示す。
【0047】
UAVが領域210に位置している場合には、UAVからの光は直角レフレクタ134のみによって反射され、UAVの方向に戻る。直角レフレクタ132及び直角レフレクタ130からの反射光はUAVには戻らない。その結果、UAVからは反射光は1つだけ見える。UAVに戻る光は直角レフレクタ134からのものであるから、赤色である。
【0048】
UAVが領域212に位置している場合には、UAVからの光は直角レフレクタ132のみによって反射され、UAVの方向に戻る。直角レフレクタ134及び直角レフレクタ130からの反射光はUAVには戻らない。その結果、UAVからは反射光は1つだけ見える。これは直角レフレクタ132によるものであるから、入射光の色と同じである。
【0049】
UAVが領域214に位置している場合には、UAVからの光は直角レフレクタ130のみによって反射され、UAVの方向に戻る。直角レフレクタ134及び直角レフレクタ132からの反射光はUAVには戻らない。その結果、UAVからは反射光は1つだけ見える。これは直角レフレクタ130によるものであるから、緑色である。
【0050】
UAVが角度領域210の上限より上方にいると、UAVからの光はパッシブ誘導・ガイド装置100に対し5度、10度、15度のいずれとも異なる角度で入射する。直角レフレクタ132、134、及び130からの反射光の方向はUAVとは別の方向となる。その結果、UAVにはパッシブ誘導・ガイド装置100から全く光が反射して来ない。
【0051】
以上から、UAVから見て、パッシブ誘導・ガイド装置100から常に白色の反射光が見えるような角度で滑走路60に進入すれば、安全な進入角度であることが分かる。赤い反射光が見えれば、高度が高すぎることが分かる。緑の反射光が見えれば高度が低すぎることが分かる。UAVでは、この反射光をカメラで捉えて電気信号に変換することで安全かつ効率的に自動着陸をすることが可能である。
【0052】
本実施の形態のようなロータリー空港を用いることにより、多数のUAVを効率的に着陸させたり、離陸させたりすることができる。ロータリー空港を設置するために必要な面積も少なくて済む。電波を使用しないので、UAVの誘導に混乱が生じる危険性も少ない。
【0053】
なお、本実施の形態では、UAVにおいて着陸時に照射する光線は白色光であり、照射範囲が絞られてはいるものの、ある広がりを持っているので、UAVからの光が直角レフレクタ130,132及び134のいずれによって反射された場合も、進入角度が5度、10度、及び15度の近辺であればUAVには確実に反射光が到達する。
【0054】
上記実施の形態では、推進装置56として電動型ダクテッドファンを使用するが、これに限定されるわけではない。エンジンで稼動するものを使用してもよい。中央デッキ50にモータを設け、モータによりウィング52を回転させるようにしてもよい。中央デッキ50に設けたモータと、ウィング52に設けた推進装置とを併用してもよい。
【0055】
上記実施の形態では、ウィング52は2枚だけとなっているが、もちろんこの枚数をもっと増やしてもよい。共振を防ぐため、ウィング52を奇数枚としてもよい。
【0056】
さらに、上記実施の形態では、再帰レフレクタ150及び152はUAVからデッキ54までの距離の測定のみに使用している。しかし本発明はそのような実施の形態には限定されない。再帰レフレクタ150及び152を光通信に利用することもできる。光通信では、デッキ54を識別する情報を全UAVに送信したり、時分割で複数のUAVの各々と通信したりすることができる。
【0057】
上記実施の形態では、もっぱらロータリー空港をUAVの離着陸に使う場合のみを説明している。しかし本発明はそのような実施の形態には限定されず、有人の航空機の離着陸に使用できることはもちろんである。
【0058】
上記実施の形態では、ウィング52を水平方向の面内で回転させている。しかし本発明はそのような実施の形態に限定されるわけではない。ウィング52に多少角度を持たせて回転させることも可能である。デッキを移動させる機構は、回転するウィングに限定されるわけではなく、例えばベルトコンベアのようなものでもよい。対象となる飛翔体がUAVに限定される場合には、デッキがベルトコンベアの上面を移動している状態で飛翔体を着陸させ、ベルトコンベアの下面にデッキがあるときに飛翔体をデッキから取り外すような機構を用いてもよい。いずれの場合にも、デッキの後端にパッシブ誘導・ガイド装置86のような装置を設けることにより、UAVの自動的な着陸が可能になる。
【0059】
上記実施の形態では、パッシブ誘導・ガイド装置86に飛翔体から光を照射し、その反射光を飛翔体の誘導に用いている。反射光を検知する仕組みを飛翔体に備えるならば、飛翔体から照射される光は可視光には限らない。例えば遠赤外線、赤外線、又は紫外線を使用してもよい。このように、光を誘導に用いることにより、電波を用いた場合と異なり、妨害に強く、セキュリティの高い誘導を行なうことができる。
【0060】
さらに、上記実施の形態では、ウィング52を一層式で用いている。しかし本発明はそのような実施の形態には限定されない。ウィング52を複数段設けて多層式とすると、機構は複雑になるがUAVなどの離着陸の容量を増大させることができる。図7に、多層式のロータリー空港240の概略を示す。
【0061】
図7を参照して、ロータリー空港240は、第1の実施の形態に係る中央デッキ50の先端部分を上に伸長させた中央デッキ250と、この中央デッキ250の周囲を回転可能なように、中央デッキ250に取付けられた第1層のウィング52A及び52Bと、第1層のウィング52A及び52Bの上部に、第1層のウィング52A及び52Bと同様に中央デッキ250の周囲を回転可能なように設けられた第2層のウィング252A及び252Bとを含む。
【0062】
第2層のウィング252A及び252Bの構成は、ウィング52と同様である。具体的には、第2層のウィング252Aの先端にはデッキ54と同様の構造のデッキ254Aが設けられる。第2層のウィング252Aの先端下部には推進装置56と同様の推進装置256Aが設けられる。第2層のウィング252Bにも同様に、デッキ254B及び推進装置256Bが備えられる。
【0063】
ウィング52を3層以上としてもよい。このように、ウィングを多層式とすることにより、一層式の場合と比較してロータリー空港の離着陸の処理能力を格段に向上させることができる。
【0064】
今回開示された実施の形態は単に例示であって、本発明が上記した実施の形態のみに制限されるわけではない。本発明の範囲は、発明の詳細な説明の記載を参酌した上で、特許請求の範囲の各請求項によって示され、そこに記載された文言と均等の意味及び範囲内での全ての変更を含む。
【符号の説明】
【0065】
40,240 ロータリー空港
50,250 中央デッキ
52,52A,52B,252,252A,252B ウィング
54,54A,54B,254,254A,254B デッキ
56,56A,56B,256,256A,256B 推進装置
60 フラップ
80 プラットホーム
82 クランプ機構
84 移動機構
86 パッシブ誘導・ガイド装置
120,122 偏光板付再帰レフレクタ
130,132,134 直角レフレクタ
150,152 再帰レフレクタ
【技術分野】
【0001】
この発明は、飛行機などの飛翔体の着陸のための装置に関し、特に、多数の飛翔体を安全かつ効率的に着陸させるための着陸装置に関する。
【背景技術】
【0002】
近年のロボット技術及び飛行制御技術の開発及び運用の急速な進展に伴い、最近、多くの国でUAV(Unmanned Air Vehicle)と呼ばれる、無人飛行機の研究、開発及び実用化に向けての積極的な活動が進行している。米国DARPA(Defense Advanced Research Project Agency)の研究開発、日本の防衛省の超小型偵察機の開発、複数の企業によるUAVの研究開発、及びビジネスへの応用などが刺激となって、多くの学会でも、この分野に関連する技術の紹介、研究、及び開発を紹介した記事を見ることが出来る。
【0003】
例えば、比較的小型のUAVを施設の周辺に飛ばし、搭載したカメラで周囲を監視させる技術などが開発されている。UAVに物流を担わせることも可能であろう。UAVには人間が登場する必要はないため、コストがそれほどかからないこともあって、今後UAVが普及する可能性は高い。
【0004】
しかし、そうしたUAV普及のネックは地上設備である。UAVの離陸及び着陸を担う空港とその設備とに関しては、研究はそれほど進んでいない。既存の国際空港及び地方空港をはじめとする、民間航空輸送システムを担う空港の能力については、依然として長期展望が未だに開けていない様子である。今後、UAVの利用が多くなる場合、既存の空港に頼った運用を行なうことは不可能であろう。大量のUAVを利用した物流、監視及びモニタ、災害防止のための空撮などの需要が将来発生したときに、都市近郊又は災害地域などでUAVを有効に利用できるかどうかは心許ない状況である。特に、UAVの利点を生かして、人間の手をできるだけ必要としないような形でUAVが離陸及び着陸できるようにすることが望ましい。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開昭47-17198号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
UAVの発射又は離陸に関しては、現在のところ「手投げ」方式が主流である。手投げ方式は、飛行場のような広い土地が不要なため便利ではあるが、多数のUAVを自動的に運用する際には利用できない。着陸方式としては、気球を利用してゆっくりと落下させたり、低空を低速度で飛ばしながら推力を切って、無理やりに落下させたりする方式が行なわれている。しかしこのような方式はいずれも、自動的に大量のUAVの着陸を行なわせるには不適当な方法である。
【0007】
こうした問題に対処するため、広い土地を準備して、通常の民間飛行機と同様、滑走路を使用した離陸及び着陸をさせることも考えられる。しかし、極めて多くのUAVを絶え間なく離陸させ、着陸させることに対応する空港設備を設けることは、費用面から言っても、保守の作業量という面から見ても、これまでの発想では不可能に近い。したがって、ビジネスとして、UAVを大量に発射及び着陸させることができるシステム(自動誘導、ガイド、混雑回避、衝突回避などを含め)が必要になると考えられる。
【0008】
こうした問題は解決するための一つの方策として、回転するウィングの先端にデッキを設け、このデッキに航空機を着陸させる航空機の離着設備が、特許文献1に開示されている。特許文献1に開示の航空機の離着設備では、ウィングを回転させながら航空機をデッキに着陸させ、そのまま回転を続けながら給油などを行なって再度デッキから離陸させる。ウィングが回転を続けているため、離陸も容易に行なえるという特徴がある。こうした構成であれば、広い土地を用いなくとも多数の航空機を連続して着陸させたり離陸させたりすることができる。
【0009】
しかし、特許文献1では、航空機は、管制塔からの指示にしたがって操縦士が操縦することになっている。UAVのような無人の飛翔体ではそのような前提条件が充足されない。無線を使用して多数のUAVの離陸又は着陸を誘導しようとする場合、チャンネルが限定されるため、安全に誘導が行なえないという問題がある。特に、離陸と異なり着陸の際には、飛翔体とデッキとを共に移動させながら飛翔体をデッキに誘導しなければならず、上記した問題が顕著に現れる。
【0010】
それゆえに本発明の目的は、多数の飛翔体を、限定された面積の中で安全に着陸させる飛翔体の着陸装置を提供することである。
【課題を解決するための手段】
【0011】
本発明の第1の局面に係る着陸装置は、飛翔体を着陸させるための着陸装置であって、飛翔体を着脱自在な着脱装置を備えた飛翔体着陸用のデッキと、一定の周回軌道上でデッキを所定の方向に移動させるための駆動手段とを含み、デッキの、予め定められる位置には、飛翔体からの光を反射することにより飛翔体を誘導するパッシブ誘導装置が設けられている。
【0012】
駆動手段は、一定の周回軌道上でデッキを所定の方向に移動させる。このデッキに着陸しようとする飛翔体は、デッキに向けて光を照射する。光を受けたパッシブ誘導装置は、この光を反射する。この反射光により、デッキに着陸しようとする飛翔体が誘導される。
【0013】
誘導に光を用いるので、複数の飛翔体がデッキに着陸しようとするときに、電波と異なり混乱が生じる可能性は小さい。デッキが移動するときにも飛翔体を自動的にデッキ上に着陸させることができる。移動するデッキに飛翔体を着陸させるために、飛翔体の速度を大きく減速させる必要がない。したがって既存の空港のような長い滑走路は不要になる。
【0014】
その結果、多数の航空機を、限定された面積の中で安全に着陸させる飛翔体の着陸装置を提供することができる。
【0015】
好ましくは、パッシブ誘導装置は、デッキの姿勢により定められる基準面に対してそれぞれ所定の関係を持つように配置された複数個の直角レフレクタと、複数個の直角レフレクタが取付けられる基板とを含み、複数個の直角レフレクタの各々は、稜線を形成するように、かつ互いの間に直角が形成されるように組合された2つの反射面を有し、複数個の直角レフレクタは、それぞれの稜線と基準面とのなす角度が互いに異なるように基板に取付けられている。
【0016】
直角レフレクタは、それぞれの稜線と基準面とのなす角度が互いに異なるように基板に取付けられる。飛翔体がデッキにアプローチするときに、降下角度の変化に応じ、異なる直角レフレクタからの反射光が飛翔体に戻る。この反射光によって、基準面に対する飛翔体の進入角度が変化したことを知ることができる。
【0017】
より好ましくは、複数個の直角レフレクタは、第1、第2及び第3の直角レフレクタを含む。
【0018】
さらに好ましくは、第1の直角レフレクタの稜線が基準面となす角度と、第2の直角レフレクタが基準面となす角度との差と、第2の直角レフレクタの稜線が基準面となす角度と、第3の直角レフレクタが基準面となす角度との差が互いに等しい。
【0019】
第1、第2及び第3の直角レフレクタの少なくとも一部には、第1、第2及び第3の直角レフレクタからの反射光の色が互いに異なるようなフィルタが設けられていてもよい。
【0020】
異なる直角レフレクタからの反射光の色が互いに異なる。飛翔体において反射光の色を判別することにより、基準面への飛翔体の降下角度を知ることができる。そのため、飛翔体は安全にデッキにアプローチすることができる。
【0021】
パッシブ誘導装置はさらに、複数個の直角レフレクタに隣接して設けられた再帰反射装置を含む。
【0022】
再帰反射装置は、広い範囲からの入射光を、その入射光方向と平行な方向に反射する。飛翔体が光を照射したときに、再帰反射装置からの反射光を検知することで、デッキの大まかな方向を知ることができ、正しい進入路に飛翔体のコースを制御することが可能になる。さらに、飛翔体から照射された光が再帰反射装置により反射されて飛翔体に戻るまでの時間を測定することで、飛翔体からデッキまでの距離を知ることができる。その結果、飛翔体をデッキまで安全に誘導することが可能になる。
【0023】
好ましくは、複数個の直角レフレクタは、基準面と平行な一直線上に配置されている。
【0024】
さらに好ましくは、パッシブ誘導装置はさらに、一直線上に配置されている複数個の直角レフレクタの両端の外側にそれぞれ設けられた、第1及び第2の再帰反射板と、それぞれ第1及び第2の再帰反射板の再帰反射面上に設けられ、それぞれ基準面に対して互いに異なる角度を形成する偏光面を有する第1及び第2の偏光板とを含む。
【0025】
このような偏光板と再帰反射板とを設けることにより、飛翔体と偏光面との間の角度、したがって飛翔体と基準面との間の相対的なローリング角を知ることができる。さらに、第1及び第2の再帰反射板及び偏光板が、複数の直角レフレクタの両端より外側に配置されているため、上記した角度の測定を正確に行なうことができる。
【図面の簡単な説明】
【0026】
【図1】本発明の一実施の形態に係る一層式ロータリー空港の概略を示す斜視図である。
【図2】図1に示すロータリー空港のウィング52とその先端に設けられたデッキ54との平面図である。
【図3】図2に示すデッキ54の斜視図である。
【図4】デッキ54の後端面に設けられるパッシブ誘導・ガイド装置86の斜視図である。
【図5】パッシブ誘導・ガイド装置86が持つ3種の直角レフレクタ130,132及び134の傾きを説明するための図である。
【図6】パッシブ誘導・ガイド装置86を用いた、デッキ54に進入するUAV230の誘導方式を説明するための図である。
【図7】本発明の実施の形態に係る多層式ロータリー空港の概略を示す斜視図である。
【発明を実施するための形態】
【0027】
以下の図面及び説明において、同一部品には同一の参照符号を付してある。それらの名称及び機能も同一である。したがって、それらについての詳細な説明は繰返さない。
【0028】
図1を参照して、本発明の飛翔体の着陸装置の一実施の形態に係るロータリー空港40は、一層式のロータリー空港であって、地上に設置された中央デッキ50と、中央デッキ50を中心軸としてその周囲を回転可能なように中央デッキ50に結合された、翼型断面の2つのウィング52A及び52B(このようなウィングを総称して単にウィング52と呼ぶ。)と、ウィング52A及びウィング52Bの先端上にそれぞれ設けられ、離陸時及び着陸時にUAV58をリリースしたり、ホールドしたりする機構を備えたデッキ54A及び54B(このようなデッキを総称してデッキ54と呼ぶ。)とを含む。ウィング52は中央デッキ50に装着された、中央デッキ50の周囲を回転可能なリング(図示せず)に、ピン接続で取付けられている。ただし、この接続はピン接続でなく、固定されていてもよい。
【0029】
ロータリー空港40はさらに、それぞれウィング52A及び52Bの下面に固定された、ダクテッドファンからなる推進装置56A及び56B(このような推進装置を総称して推進装置56と呼ぶ。)を含む。ウィング52はそれほど高速で回転させる必要はないので、推進装置56としては低速でもできるだけ経済的なものを用いるのが好ましい。本実施の形態では、推進装置56として電動型のダクテッドファンを使用する。
【0030】
図2を参照して、ウィング52は、図示しないリングなどを介して中央デッキ50に固定されている。ウィング52の先端近くの後縁部には、ウィング52の揚力を調整するためのフラップ60が設けられている。ウィング52の断面を翼型としておくことで、推進装置56による推進力でウィング52が中央デッキ50の周囲を矢印62により示される方向に回転すると揚力が発生する。この揚力をフラップ60で調整することにより、ウィング52の先端部分の傾きを調整することができる。推進力を絞るとウィング52の先端は下に下がる。予めウィング52が設けられている高さを適切な高さにしておくと、デッキ54を地面に安全に下ろすことができる。
【0031】
デッキ54は、平坦な直方体形状を有するプラットホーム80と、プラットホーム80の上面に設けられ、UAVを保持したりリリースしたりする機能を持つクランプ機構82と、プラットホーム80の上面でウィング52の翼幅方向(ウィング52の回転方向と直交する方向)にクランプ機構82を移動させることにより、UAVの着陸時の飛行コースとデッキ54との位置のずれを修正してクランプ機構82によるUAVの保持を容易にするための移動機構84と、プラットホーム80の後端面に設けられ、デッキ54にUAVが着陸しようとするときにUAVを誘導するための、パッシブ誘導・ガイド装置86とを含む。
【0032】
図4を参照して、パッシブ誘導・ガイド装置86は、断面L字型の、基板としてのブロック110と、ブロック110上に、いずれもほぼ同じ方向を向くように一直線上にそろえて固定され、各々、稜線を形成するように互いに直角に組合せた2枚の反射面を持ち、所定の面に平行に入射する光のみを光源側に反射するレフレクタ(以下、このようなレフレクタを「直角レフレクタ」と呼ぶ。)130,132及び134と、直角レフレクタ130及び132の間、並びに直角レフレクタ132及び134の間にそれぞれこれらレフレクタに隣接して設けられた、UAVがデッキ54との距離を測定する際に使用する再帰レフレクタ150及び152と、直角レフレクタ130及び134の外側にそれぞれ設けられ、UAVがデッキ54の上面を基準面として相対的なローリング角を検出する際に使用する偏光板付再帰レフレクタ120及び122と、直角レフレクタ130、132、及び134、並びに再帰レフレクタ150及び152を安定して保持するよう、ブロック110に固定された支持部材140とを含む。
【0033】
偏光板付再帰レフレクタ120及び122はいずれも、再帰反射板と、偏向角が再帰反射板の長辺を基準として所定の角度をなすように再帰反射板の上に貼付された偏光板とを含む。偏光板付再帰レフレクタ120及び122には、好ましくは偏光角が異なる複数の偏光板を所定の順序で設けておく。こうすることで、偏光を用いてこれら偏光板付再帰レフレクタ120及び122をスキャンし、その反射光のパターンからデッキ54とUAVとの相対的なピッチ角を推定できる。
【0034】
直角レフレクタ130,132及び134はいずれも、稜線を形成するように互いに直角をなすように組合せた2枚の鏡面を含む。このような直角レフレクタでは、これら鏡面の双方に対して直角な面に平行な方向から入射する光は、その方向に反射される。それ以外の方向から入射する光は、別の方向に反射され、光源側には反射されない。なお、鏡面の裏面には、光を通さないような塗装がされている。
【0035】
直角レフレクタ130、132及び134は、図5(A)(B)(C)に示すように、それぞれブロック110の上面との間で5度、10度、及び15度をなすようにブロック110の上面に固定されている。したがって、ブロック110に対して進入するUAVからパッシブ誘導・ガイド装置86に向けて光を照射すると、進入角度が5度付近のときには直角レフレクタ130からの反射光のみが、10度付近の時には直角レフレクタ132からの反射光のみが、そして15度付近の時には直角レフレクタ134からの反射光のみが、それぞれUAVに戻る。このようにこれらレフレクタの角度差が互いに等しくなるようにすることで、アプローチの際の制御が容易になるという効果がある。
【0036】
一方、本実施の形態では、直角レフレクタ130の鏡面の1枚には緑のフィルタが設けられ、直角レフレクタ134の鏡面の一枚には赤のフィルタが設けられている。直角レフレクタ132の面にはフィルタは設けられていない。したがって、ブロック110に対して進入するUAVからパッシブ誘導・ガイド装置86に向けて光を照射すると、進入角度が5度付近のときには緑色の反射光が、10度付近の時には白色の反射光が、そして15度付近の時には赤色の反射光のみが、それぞれUAVから観測される。この光の色を見ることで、UAVがデッキ54に対して相対的にどのような進入角でアプローチしているかを知ることができる。
【0037】
図5(A)は直角レフレクタ130の側面図、図5(B)は直角レフレクタ132の側面図、図5(C)は直角レフレクタ134の側面図をそれぞれ示す。これら図においては、図を明快にするために、背後に存在する直角レフレクタ、再帰レフレクタ150及び152、支持部材140などは示していない。
【0038】
図5(B)を参照して、直角レフレクタ132は、その稜線(直角レフレクタ132を構成する2枚の鏡面の交線の背部に相当)がブロック110の上面に対する垂線から10度だけ、後方に傾くようにブロック110の上面に固定されている。したがって直角レフレクタ132は図5(B)に示すようにブロック110の上面に平行な方向170より10度上を向く。すなわち、直角レフレクタ132は、ブロック110の上面に平行な方向から10度上方を向いた面内で入射する光はその方向に反射するが、それ以外の方向から入射する光は光源側には反射しない。
【0039】
同様に、図5(A)を参照して、直角レフレクタ130は、その稜線がブロック110の上面に対し垂直な位置から10度だけ後方に傾くようにブロック110の上面に固定されている。その結果、直角レフレクタ130は、仰角10度の面内で入射する光についてはその方向に反射する。それ以外の方向から入射する光は別の方向に反射され、光源側には反射されない。
【0040】
図5(C)を参照して、直角レフレクタ134は、その稜線がブロック110の上面に対し垂直な位置から15度だけ後方に傾くようにブロック110の上面に固定されている。その結果、直角レフレクタ134は、仰角15度の面内で入射する光についてはその方向に反射し、それ以外の方向から入射する光は反射しない。
【0041】
例えば、図5(B)に示す、直角レフレクタ132への入射光180が仰角10度の面内で入射するものとする。すると、この光は直角レフレクタ132の2枚の反射面で反射され、光源側に反射される。一方、仰角が10度以外の面から入射する入射光182の場合、図5(B)に示すように、光源とは異なる方向に反射され、光源に戻ることはない。直角レフレクタ130及び134についても同様である。
【0042】
以上に述べたパッシブ誘導・ガイド装置100の構成についてまとめると、以下のようになる。図4を参照して、例えば直角レフレクタ132は、2つの反射面を互いに直角に組合せた稜線を有する。直角レフレクタ132は、この稜線が、ブロック110の上面に対する直交面内にあるように、かつ図4から明らかなように、2つの鏡面がこの直交面(直角レフレクタ132の中心面)を中心に面対称となるように、ブロック110の上面に固定されている。
【0043】
このように構成されたパッシブ誘導・ガイド装置100によれば、UAVを次のようにしてデッキ54に着陸させることができる。推進装置56により適切な大きさの推力を発生させると、ウィング52が回転する。この回転に伴い、ウィング52の断面が翼型であるため、ウィング52に揚力が生じ、デッキ54を適当な高さに維持することができる。デッキ54が一定の速さで回転している状態で、UAVがこのデッキ54にアプローチし、両者の相対速度がほぼ0となった時点でUAVがデッキ54の上に位置するようにUAVの速度を調整し、クランプ機構82でUAVを保持する。
【0044】
このとき、UAVは次のようにしてデッキ54にアプローチする。UAVがデッキ54にアプローチする時に、前方に向けて白色光のライトを照射する。UAVにはパッシブ誘導・ガイド装置100からの反射光が次のように見えることになる。
【0045】
図6を参照して、図4に示す偏光板付再帰レフレクタ120及び122、再帰レフレクタ150及び152はいずれも再帰反射性を持っている。したがって、UAV230がおおむねデッキ54に向かってさえいれば、例えば図6の半直線200及び202の間のような広い領域のどこにいてもデッキ54に向けて白色光を照射すると、反射光が必ずUAV230に戻ってくる。この反射光を用いて、デッキ54に対するUAV230の相対的なローリング角及び距離を測定し、デッキ54にアプローチすることができる。
【0046】
図6を参照して、UAV230がデッキ54にアプローチするときの相対的な進入(降下)角度は以下のようにして調整できる。図6に示す角度領域210、212及び214は、それぞれ、デッキ54に対する相対進入角が5度、10度、15度の近辺である領域を示す。
【0047】
UAVが領域210に位置している場合には、UAVからの光は直角レフレクタ134のみによって反射され、UAVの方向に戻る。直角レフレクタ132及び直角レフレクタ130からの反射光はUAVには戻らない。その結果、UAVからは反射光は1つだけ見える。UAVに戻る光は直角レフレクタ134からのものであるから、赤色である。
【0048】
UAVが領域212に位置している場合には、UAVからの光は直角レフレクタ132のみによって反射され、UAVの方向に戻る。直角レフレクタ134及び直角レフレクタ130からの反射光はUAVには戻らない。その結果、UAVからは反射光は1つだけ見える。これは直角レフレクタ132によるものであるから、入射光の色と同じである。
【0049】
UAVが領域214に位置している場合には、UAVからの光は直角レフレクタ130のみによって反射され、UAVの方向に戻る。直角レフレクタ134及び直角レフレクタ132からの反射光はUAVには戻らない。その結果、UAVからは反射光は1つだけ見える。これは直角レフレクタ130によるものであるから、緑色である。
【0050】
UAVが角度領域210の上限より上方にいると、UAVからの光はパッシブ誘導・ガイド装置100に対し5度、10度、15度のいずれとも異なる角度で入射する。直角レフレクタ132、134、及び130からの反射光の方向はUAVとは別の方向となる。その結果、UAVにはパッシブ誘導・ガイド装置100から全く光が反射して来ない。
【0051】
以上から、UAVから見て、パッシブ誘導・ガイド装置100から常に白色の反射光が見えるような角度で滑走路60に進入すれば、安全な進入角度であることが分かる。赤い反射光が見えれば、高度が高すぎることが分かる。緑の反射光が見えれば高度が低すぎることが分かる。UAVでは、この反射光をカメラで捉えて電気信号に変換することで安全かつ効率的に自動着陸をすることが可能である。
【0052】
本実施の形態のようなロータリー空港を用いることにより、多数のUAVを効率的に着陸させたり、離陸させたりすることができる。ロータリー空港を設置するために必要な面積も少なくて済む。電波を使用しないので、UAVの誘導に混乱が生じる危険性も少ない。
【0053】
なお、本実施の形態では、UAVにおいて着陸時に照射する光線は白色光であり、照射範囲が絞られてはいるものの、ある広がりを持っているので、UAVからの光が直角レフレクタ130,132及び134のいずれによって反射された場合も、進入角度が5度、10度、及び15度の近辺であればUAVには確実に反射光が到達する。
【0054】
上記実施の形態では、推進装置56として電動型ダクテッドファンを使用するが、これに限定されるわけではない。エンジンで稼動するものを使用してもよい。中央デッキ50にモータを設け、モータによりウィング52を回転させるようにしてもよい。中央デッキ50に設けたモータと、ウィング52に設けた推進装置とを併用してもよい。
【0055】
上記実施の形態では、ウィング52は2枚だけとなっているが、もちろんこの枚数をもっと増やしてもよい。共振を防ぐため、ウィング52を奇数枚としてもよい。
【0056】
さらに、上記実施の形態では、再帰レフレクタ150及び152はUAVからデッキ54までの距離の測定のみに使用している。しかし本発明はそのような実施の形態には限定されない。再帰レフレクタ150及び152を光通信に利用することもできる。光通信では、デッキ54を識別する情報を全UAVに送信したり、時分割で複数のUAVの各々と通信したりすることができる。
【0057】
上記実施の形態では、もっぱらロータリー空港をUAVの離着陸に使う場合のみを説明している。しかし本発明はそのような実施の形態には限定されず、有人の航空機の離着陸に使用できることはもちろんである。
【0058】
上記実施の形態では、ウィング52を水平方向の面内で回転させている。しかし本発明はそのような実施の形態に限定されるわけではない。ウィング52に多少角度を持たせて回転させることも可能である。デッキを移動させる機構は、回転するウィングに限定されるわけではなく、例えばベルトコンベアのようなものでもよい。対象となる飛翔体がUAVに限定される場合には、デッキがベルトコンベアの上面を移動している状態で飛翔体を着陸させ、ベルトコンベアの下面にデッキがあるときに飛翔体をデッキから取り外すような機構を用いてもよい。いずれの場合にも、デッキの後端にパッシブ誘導・ガイド装置86のような装置を設けることにより、UAVの自動的な着陸が可能になる。
【0059】
上記実施の形態では、パッシブ誘導・ガイド装置86に飛翔体から光を照射し、その反射光を飛翔体の誘導に用いている。反射光を検知する仕組みを飛翔体に備えるならば、飛翔体から照射される光は可視光には限らない。例えば遠赤外線、赤外線、又は紫外線を使用してもよい。このように、光を誘導に用いることにより、電波を用いた場合と異なり、妨害に強く、セキュリティの高い誘導を行なうことができる。
【0060】
さらに、上記実施の形態では、ウィング52を一層式で用いている。しかし本発明はそのような実施の形態には限定されない。ウィング52を複数段設けて多層式とすると、機構は複雑になるがUAVなどの離着陸の容量を増大させることができる。図7に、多層式のロータリー空港240の概略を示す。
【0061】
図7を参照して、ロータリー空港240は、第1の実施の形態に係る中央デッキ50の先端部分を上に伸長させた中央デッキ250と、この中央デッキ250の周囲を回転可能なように、中央デッキ250に取付けられた第1層のウィング52A及び52Bと、第1層のウィング52A及び52Bの上部に、第1層のウィング52A及び52Bと同様に中央デッキ250の周囲を回転可能なように設けられた第2層のウィング252A及び252Bとを含む。
【0062】
第2層のウィング252A及び252Bの構成は、ウィング52と同様である。具体的には、第2層のウィング252Aの先端にはデッキ54と同様の構造のデッキ254Aが設けられる。第2層のウィング252Aの先端下部には推進装置56と同様の推進装置256Aが設けられる。第2層のウィング252Bにも同様に、デッキ254B及び推進装置256Bが備えられる。
【0063】
ウィング52を3層以上としてもよい。このように、ウィングを多層式とすることにより、一層式の場合と比較してロータリー空港の離着陸の処理能力を格段に向上させることができる。
【0064】
今回開示された実施の形態は単に例示であって、本発明が上記した実施の形態のみに制限されるわけではない。本発明の範囲は、発明の詳細な説明の記載を参酌した上で、特許請求の範囲の各請求項によって示され、そこに記載された文言と均等の意味及び範囲内での全ての変更を含む。
【符号の説明】
【0065】
40,240 ロータリー空港
50,250 中央デッキ
52,52A,52B,252,252A,252B ウィング
54,54A,54B,254,254A,254B デッキ
56,56A,56B,256,256A,256B 推進装置
60 フラップ
80 プラットホーム
82 クランプ機構
84 移動機構
86 パッシブ誘導・ガイド装置
120,122 偏光板付再帰レフレクタ
130,132,134 直角レフレクタ
150,152 再帰レフレクタ
【特許請求の範囲】
【請求項1】
飛翔体を着陸させるための着陸装置であって、
飛翔体を着脱自在な着脱装置を備えた飛翔体着陸用のデッキと、
一定の周回軌道上で前記デッキを所定の方向に移動させるための駆動手段とを含み、
前記デッキの、予め定められる位置には、飛翔体からの光を反射することにより飛翔体を誘導するパッシブ誘導装置が設けられている、着陸装置。
【請求項2】
前記パッシブ誘導装置は、
前記デッキの姿勢により定められる基準面に対してそれぞれ所定の関係を持つように配置された複数個の直角レフレクタと、
前記複数個の直角レフレクタが取り付けられる基板とを含み、
前記複数個の直角レフレクタの各々は、稜線を形成するように、かつ互いの間に直角が形成するように組合された2つの反射面を有し、
前記複数個の直角レフレクタは、それぞれの稜線と前記基準面とのなす角度が互いに異なるように前記基板に取付けられている、請求項1に記載の着陸装置。
【請求項3】
前記複数個の直角レフレクタは、第1、第2及び第3の直角レフレクタを含む、請求項2に記載の着陸装置。
【請求項4】
前記第1の直角レフレクタの稜線が前記基準面となす角度と、前記第2の直角レフレクタが前記基準面となす角度との差と、
前記第2の直角レフレクタの稜線が前記基準面となす角度と、前記第3の直角レフレクタが前記基準面となす角度との差が互いに等しい、請求項3に記載の着陸装置。
【請求項5】
前記第1、第2及び第3の直角レフレクタの少なくとも一部には、前記第1、第2及び第3の直角レフレクタからの反射光の色が互いに異なるようなフィルタが設けられている、請求項4に記載の着陸装置。
【請求項6】
前記パッシブ誘導装置はさらに、前記複数個の直角レフレクタに隣接して設けられた再帰反射装置を含む、請求項2〜請求項5のいずれかに記載の着陸装置。
【請求項7】
前記複数個の直角レフレクタは、前記基準面と平行な一直線上に配置されている、請求項2〜請求項5のいずれかに記載の着陸装置。
【請求項8】
前記パッシブ誘導装置はさらに、
前記一直線上に配置されている前記複数個の直角レフレクタの両端の外側にそれぞれ設けられた、第1及び第2の再帰反射板と、
それぞれ前記第1及び第2の再帰反射板の再帰反射面上に設けられ、それぞれ前記基準面に対して互いに異なる角度を形成する偏光面を有する第1及び第2の偏光板とを含む、請求項7に記載の着陸装置。
【請求項1】
飛翔体を着陸させるための着陸装置であって、
飛翔体を着脱自在な着脱装置を備えた飛翔体着陸用のデッキと、
一定の周回軌道上で前記デッキを所定の方向に移動させるための駆動手段とを含み、
前記デッキの、予め定められる位置には、飛翔体からの光を反射することにより飛翔体を誘導するパッシブ誘導装置が設けられている、着陸装置。
【請求項2】
前記パッシブ誘導装置は、
前記デッキの姿勢により定められる基準面に対してそれぞれ所定の関係を持つように配置された複数個の直角レフレクタと、
前記複数個の直角レフレクタが取り付けられる基板とを含み、
前記複数個の直角レフレクタの各々は、稜線を形成するように、かつ互いの間に直角が形成するように組合された2つの反射面を有し、
前記複数個の直角レフレクタは、それぞれの稜線と前記基準面とのなす角度が互いに異なるように前記基板に取付けられている、請求項1に記載の着陸装置。
【請求項3】
前記複数個の直角レフレクタは、第1、第2及び第3の直角レフレクタを含む、請求項2に記載の着陸装置。
【請求項4】
前記第1の直角レフレクタの稜線が前記基準面となす角度と、前記第2の直角レフレクタが前記基準面となす角度との差と、
前記第2の直角レフレクタの稜線が前記基準面となす角度と、前記第3の直角レフレクタが前記基準面となす角度との差が互いに等しい、請求項3に記載の着陸装置。
【請求項5】
前記第1、第2及び第3の直角レフレクタの少なくとも一部には、前記第1、第2及び第3の直角レフレクタからの反射光の色が互いに異なるようなフィルタが設けられている、請求項4に記載の着陸装置。
【請求項6】
前記パッシブ誘導装置はさらに、前記複数個の直角レフレクタに隣接して設けられた再帰反射装置を含む、請求項2〜請求項5のいずれかに記載の着陸装置。
【請求項7】
前記複数個の直角レフレクタは、前記基準面と平行な一直線上に配置されている、請求項2〜請求項5のいずれかに記載の着陸装置。
【請求項8】
前記パッシブ誘導装置はさらに、
前記一直線上に配置されている前記複数個の直角レフレクタの両端の外側にそれぞれ設けられた、第1及び第2の再帰反射板と、
それぞれ前記第1及び第2の再帰反射板の再帰反射面上に設けられ、それぞれ前記基準面に対して互いに異なる角度を形成する偏光面を有する第1及び第2の偏光板とを含む、請求項7に記載の着陸装置。
【図1】


【図2】
【図3】

【図4】
【図5】
【図6】

【図7】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2010−247651(P2010−247651A)
【公開日】平成22年11月4日(2010.11.4)
【国際特許分類】
【出願番号】特願2009−98926(P2009−98926)
【出願日】平成21年4月15日(2009.4.15)
【新規性喪失の例外の表示】特許法第30条第1項適用申請有り 平成20年10月22日 社団法人日本航空宇宙学会、及び社団法人日本航空技術協会発行の「第46回 飛行機シンポジウム 講演集」に発表
【出願人】(397057809)株式会社津村総合研究所 (5)
【Fターム(参考)】
【公開日】平成22年11月4日(2010.11.4)
【国際特許分類】
【出願日】平成21年4月15日(2009.4.15)
【新規性喪失の例外の表示】特許法第30条第1項適用申請有り 平成20年10月22日 社団法人日本航空宇宙学会、及び社団法人日本航空技術協会発行の「第46回 飛行機シンポジウム 講演集」に発表
【出願人】(397057809)株式会社津村総合研究所 (5)
【Fターム(参考)】
[ Back to top ]