
株式会社小松製作所により出願された特許
891 - 900 / 1,686
銅系焼結摺動材料および複層焼結摺動部材
【課題】摺動面における局部凝着体の掻き落とし作用を発現させて相手材料に対するアタック性を少なくし、かつ自身の耐摩耗性を改善し、さらに硬質相による摩擦発熱性を抑制して、焼付き限界性を改善する。
【解決手段】Ni、Si、Ti、Co、Al、V、Pの2種以上よりなる金属間化合物が1種以上分散され、その添加量がNi、Si、Ti、Co、Al、V、Pの2種以上の合計添加量で0.5〜10質量%になるようにされている。
(もっと読む)
燃料判別装置
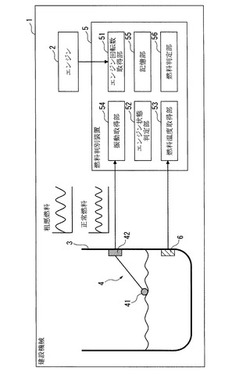
【課題】燃料の状態を適切に判別することができる燃料判別装置の提供。
【解決手段】作業機械1は、エンジン2と、燃料タンク3と、フロート式センサ4と、燃料判別装置5とを備える。燃料判別装置5は、振動取得部54と、記憶部55と、燃料判別部56とを備える。振動取得部54は、フロート式センサ4からの出力信号に基づいて、燃料タンク3に貯留される燃料の液面の高さにおける振動状態を取得する。記憶部55は、正常燃料にてエンジン2を駆動した場合に、フロート式センサ4にて検出される燃料の液面の高さにおける振動状態を記憶する。燃料判別部56は、エンジン2を駆動した場合に振動取得部54により取得される振動状態と、記憶部55に記憶される振動状態とを比較して燃料が正常であるか否かを判別する。
(もっと読む)
作業車両

【課題】作業現場ごとに異なる積み込み作業の態様に適するように、エンジン出力を作業機及び走行装置に分配する。
【解決手段】エンジン21の出力を作業機のシリンダ13,15へ伝達する可変容量型油圧ポンプ27と、エンジン21の出力を走行装置のトルクコンバータ23へ伝達する可変クラッチ22と、ホイールローダの運転者が操作可能であって、作業機が作業を行っているときの走行装置の走行距離を調節するための作業設定ダイヤル60と、作業設定ダイヤル60が受け付けた入力に基づいて可変容量型油圧ポンプ27及び可変クラッチ22の可変度合いを制御するコントローラ200とを備える。
(もっと読む)
サスペンション装置
【課題】シリンダ回りの構造を簡素にでき、全体として小型化できるか、あるいは小型化できる分、他の機構を容易に組み込むことができるサスペンション装置を提供すること。
【解決手段】サスペンション装置1は、圧油が入り込むボトム室21を有したシリンダ2と、シリンダ2に対して出没自在に設けられたロッドチューブ3と、ロッドチューブ3の端部に設けられてシリンダ2内を摺動するピストン31と、シリンダ2内のボトム室21と当該シリンダ2およびロッドチューブ3間に形成される背室22とを連通させる外部流路25と、ピストン31に設けられた減衰力調節機構50とを備えている。
(もっと読む)
リダクション型アクスル装置
【課題】デファレンシャルギヤユニットから遊星歯車機構に動力を伝動する伝動軸の太陽歯車側端面と、キャリアをアクスル軸に固定するホルダープレートの端面との間の摩擦を減少させることにより、小型で長寿命のリダクション型アクスル装置を提供する。
【解決手段】軸方向に直接拘束されていない伝動軸(30)の太陽歯車(54)側端面と、伝動軸(30)よりも低速で回転するホルダープレート(60)との間の接触面に、回り止めされたワッシャ(70)を配置した。また、ワッシャ(70)を、少なくともホルダープレート(60)締結用のホールドボルト(90)を含む締結手段の座面に形成されたワッシャ抜け止め面(96)と係合させて脱落を防止する構造とした。これにより、ホルダープレート(60)締結用のホールドボルト(90)を用いて、ワッシャ(70)を保持することができる。
(もっと読む)
作業機械
【課題】電動アクチュエータを備えることに起因した問題を招来することなくアイドリング運転を停止して燃料消費量の低減や排出する二酸化炭素量の低減を図ること。
【解決手段】油圧アクチュエータ21,22,23,31,32と、発電電動機44が発電動作した場合の電力を蓄積する一方、発電電動機44が電動動作する場合に電力を供給する蓄電器61と、旋回用電動モータ10とを備え、操作レバー50,70の操作により油圧アクチュエータ21,22,23,31,32及び旋回用電動モータ10を動作させるようにした作業機械において、エンジン40が運転されている状態において操作レバー50,70のニュートラル状態が所定の停止時間継続した場合に、少なくとも蓄電器61が所定の電圧以上蓄電されていることを条件にエンジン40のアイドリング運転を停止させ、かつ旋回用電動モータ10を動作禁止状態に保持するアイドリング停止制御手段110を備えた。
(もっと読む)
作業ロボットの位置計測装置
【課題】作業ロボットにおいて光切断法により3次元位置計測を行うに際して、作業ロボットの駆動軸の作動を不要とすることで、作業効率を向上させるとともに、位置計測ユニットがワーク等と干渉することを回避する。
【解決手段】作業ロボット10の手首先端軸11には、作業用ツール20が設けられるとともに、光切断法により位置計測を行う位置計測ユニット30が設けられている。位置計測ユニット30内には、作業対象のワークW上で交差する第1のスリット光61、第2のスリット光62をワークWに向けてそれぞれ投光する第1のスリット光源、第2のスリット光源と、第1のスリット光61に対応する光切断像を含む第1の画像を撮像するとともに、第2のスリット光62に対応する光切断像を含む第2の画像を撮像する撮像手段50とが設けられている。
(もっと読む)
建設機械の盗難防止システム、および移動機械の管理システム
【課題】建設機械のアンテナが切断等で機能しない場合も、建設機械の位置を追跡でき建設機械の盗難を防止できるシステムを提供すること。
【解決手段】盗難防止システム100において、建設機械1は、管理装置8と通信する通信端末およびアンテナ、建設機械の現在位置を計測するGPSセンサおよびアンテナ、通信アンテナおよびGPSアンテナの切断を判定する判定手段、無線LAN装置を備え、サービスカー2は、管理装置8と通信する通信端末、無線LAN装置を備え、建設機械1の無線LAN装置は、サービスカー2の無線LAN装置からの電波受信時に、通信アンテナおよびGPSアンテナの少なくとも一方が切断された旨の情報と、識別情報とを送信し、サービスカー2の通信端末は、無線LAN装置が受信した識別情報およびアンテナ切断情報をサービスカー2の現在位置情報とともに管理装置8に送信する。
(もっと読む)
作業機械の盗難防止監視システム
【課題】作業機械が盗難にあったことを確実に判断したり、また盗難にあう可能性を判断して盗難を未然に防止したりできる作業機械の盗難防止監視システムの提供。
【解決手段】作業機械A,Bと、作業現場に設置されている固定端末と、それらからの遠隔位置に配置されたサーバとを備え、作業機械A,Bおよび固定端末には、電力供給を不要とする受動型ICタグ18と、電力供給を必要とする能動型ICタグ19と、各ICタグ18,19からのICタグ情報信号を基にメンバーリストを作成するメンバーリスト作成手段とが設けられ、サーバには、メンバーリストを基にグループリストを作成するグループリスト作成手段と、作成されたグループリストを保存するグループリスト記憶部と、保存されたグループリストと新たに作成されたグループリストとを照合して盗難を特定する盗難特定手段とが設けられている。
(もっと読む)
ハイブリッド建設機械
【課題】旋回モータを駆動させるための操作用にパイロット油圧で遠隔操作する旋回操作レバーを用いる場合に、旋回操作レバーの操作に伴う信号に関する冗長性を向上させ、旋回モータを適正に制御できるようにする。
【解決手段】回転速度センサ105で検出される旋回モータ103の回転数SWGspdとともに、旋回モータ103を遠隔操作する旋回操作レバー42の操作情報として、旋回操作レバーの操作方向、操作量を電気的に検出するポジションセンサ46の出力信号Lswと、操作方向、操作量に応じて生ずるパイロット2次圧を電気信号に変換する油圧センサ48の出力信号PRswとの2系統の出力信号をコントローラ6に取り込んで、旋回モータ103の動作を制御するとともに、これらの出力信号が所定の条件を満たさないときには警報を発するようにした。
(もっと読む)
891 - 900 / 1,686
[ Back to top ]