
セイコーエプソン株式会社により出願された特許
1,761 - 1,770 / 51,324
読取装置、読取装置の制御方法、及び、プログラム
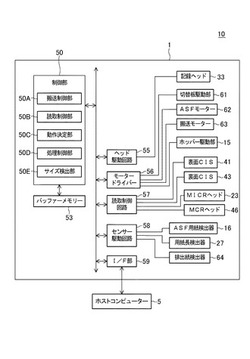
【課題】読取対象物を読み取って、読取結果に応じて読取対象物を処理する読取装置を小型化できるようにする。
【解決手段】読取装置1は、読取対象物を搬送し、搬送される読取対象物に記録された情報を読取対象物の搬送路に設けられた読取手段によって読み取り、この読取結果に基づいて決定された読取後の動作内容に従って、処理制御部50Dが、読取対象物の搬送路上において読取手段より下流に設けられた処理手段により読取対象物を処理し、動作決定部50Cが動作内容を決定した後に、搬送制御部50Aが処理手段の処理位置または処理位置の前まで読取対象物を上流側に搬送する。
(もっと読む)
温度補償発振器および電子機器

【課題】より低消費電力で、起動時の周波数変動を抑制すること。
【解決手段】温度補償発振器は、第1入力端子から入力された温度補償電圧に応じた周波数で発振した基準信号を第1出力端子から出力する発振回路と、第2入力端子から入力された基準信号に基づいて周波数補償量を示す補正データを第2出力端子から出力する補償回路と、補償回路内に設けられ、第3入力端子に第1レベルの信号が入力されている間は基準信号をN分周した信号を第3出力端子から出力し、第3入力端子に第2レベルの信号が入力されると動作を停止する分周器と、補償回路内に設けられ、第4入力端子から入力された信号をクロック信号として動作し、クロック信号を基準として所定の時間が経過すると第2レベルの信号を第4出力端子から出力するカウンター回路とを有する。
(もっと読む)
圧電デバイス、圧電デバイスの製造方法
【課題】信頼性が高い圧電デバイスの製造方法を実現する。
【解決手段】圧電デバイス10の製造方法は、回路素子40の接続電極42,45に第1バンプ72,75を形成する工程と、パッケージ21内に圧電振動片30を収容し、圧電振動片30と電気的に接続されるパッケージ21の外底面22aに設けられた外部端子50,53を有する圧電振動子20と、貫通孔61,62有する配線基板60と、を接合する工程と、貫通孔61,62の外部端子50,53を露出する位置に第2バンプ77,78を形成する工程と、貫通孔61,62の配設位置において、第1バンプ72,75と第2バンプ77,78を接合し、外部端子50,53と接続電極42,45とを接続する工程と、を含む。
(もっと読む)
電気機械装置、ロボット及び移動体
【課題】渦電流損失による発熱を抑制して、電気機械装置の効率を向上させる。
【解決手段】電気機械装置10であって、中心軸230と、前記中心軸230の外周に沿った円筒面上に配置された永久磁石200と、を有するローター20と、前記永久磁石200の外周に沿った円筒面上に配置された空芯の電磁コイル100A、100Bと、前記永久磁石200と前記電磁コイル100A、100Bとの間に配置された円筒形のパイプ部材270と、を有するステーター15と、を備え、前記パイプ部材270は、炭素繊維強化プラスチックで形成されており、前記炭素繊維強化プラスチックは、炭素繊維271が束ねられて形成された炭素繊維束272が編まれて形成されている。
(もっと読む)
駆動装置、及び、駆動方法
【課題】 圧電アクチュエーターを用いた駆動装置の起動時において、起動時間のばらつきの少ない安定した起動を実現する。
【解決手段】 信号が印加されることによって振動する素子を有する振動部と、前記素子の振動により駆動される被駆動体と、前記素子を振動させる第1の信号、及び、前記第1の信号よりも高い周波数を有する第2の信号を生成する信号生成部と、を備える駆動装置であって、前記被駆動体と前記振動部とが接触した状態において、前記第1の信号を前記素子に印加することと、前記第2の信号を所定時間だけ前記素子に印加することと、によって、前記被駆動体の駆動を開始する。
(もっと読む)
電気機械装置、並びに、電機機械装置を用いた移動体およびロボット
【課題】電気機械装置のケーシングで発生する渦電流損失を抑制する。
【解決手段】本発明の電気機械装置は、円筒状の磁石バックヨーク、および、磁石バックヨークの外周に沿って円筒状に配置されたローター磁石、を有するローターと、ローターの外周に沿って円筒状に配置された空芯の電磁コイル、および、円筒状に配置された電磁コイルの外周に配置された円筒状のコイルバックヨーク、を有するステーターと、ステーターおよびローターを覆うケーシングと、を備え、ケーシングの少なくとも一部は、炭素繊維強化プラスチックで形成されている。
(もっと読む)
電気機械装置、ロボット及び移動体
【課題】渦電流損失を抑制して、電気機械装置の効率を向上させる。
【解決手段】電気機械装置10であって、中心軸230、前記中心軸の外周に沿った第1の円筒面上に配置された永久磁石200、を有するローター20と、前記永久磁石の外周に沿った第2の円筒面上に配置された電磁コイル100A、100B、前記電磁コイルを挟んで前記永久磁石とは反対側の円筒面に配置されたコイルバックヨーク115、を有するステーター15と、を備え、前記永久磁石と前記コイルバックヨークとの間の間隔をL1、前記コイルバックヨークの厚さをL2とするとき、前記コイルバックヨークの外周面から漏れる最大漏磁束密度が20ミリテスラ以下となるように、前記間隔L1、厚さL2の値が設定されている。
(もっと読む)
超音波測定装置及び超音波測定装置の制御方法
【課題】超音波測定を被検者自身が容易に行うことのできる機器等の提案。
【解決手段】超音波測定装置において、本体部30の裏面部には、血管位置判定用アレイ10と血管性状測定用アレイ20との2本のアレイで構成される超音波振動子アレイが構成されている。血管位置判定用アレイ10は、超音波振動子を第1方向に沿って配列した第1アレイ11と、超音波振動子を第1方向と平行な第2方向に沿って配列した第2アレイ12との平行な2本のアレイを有する。血管性状測定用アレイ20は、複数の超音波振動子の組でなる超音波振動子組を第1方向に交差する第3方向に沿って配列し、各超音波振動子組を第1方向に徐々にずらして配列して構成される。
(もっと読む)
マニピュレーター、マニピュレーターの駆動方法およびロボット
【課題】複雑で大量のデータを処理してアームを制御することによって生じる制御駆動時間の遅れが発生しない、慣性機構、ジャイロ装置によってリアルタイムにアームの振動を抑制し、正確な停止位置が維持できるマニピュレーターと、そのマニピュレーターを用いたロボットを実現する。
【解決手段】回転軸と、前記回転軸の軸方向に交差する面で回転可能に前記回転軸を介して接続される第1アームと第2アームと、を備え、前記第1アームまたは前記第2アームの少なくとも一方に、前記回転軸の軸方向に交差する方向の回転軸中心を有するフライホイールを備えるマニピュレーター。
(もっと読む)
ロボット、ロボット制御装置、ロボット制御方法、およびプログラム
【課題】ロボットの姿勢ごとのハンドに加わる重力の影響を適切に補正するロボット、ロボット制御装置、ロボット制御方法、およびロボット制御プログラムを提供することを目的としている。
【解決手段】ハンドとアーム2との間に介挿されている力センサー30に対して入力される重力の影響をモデル化した定数を有するモデル式を記憶する記憶部104と、ハンドが対象物を把持していない状態における力センサーが出力する検出値を用いて、モデル式の定数の値を算出する変数算出部106と、変数算出部が算出した定数をモデル式に代入して力センサーに対して入力される重力の影響の補正値を算出し、力センサーが出力する検出値から算出した補正値を差し引くことで、力センサーの検出値を補正する補正部107とを備える。
(もっと読む)
1,761 - 1,770 / 51,324
[ Back to top ]