
トヨタ自動車株式会社により出願された特許
151 - 160 / 59,920
車両用乗員拘束装置
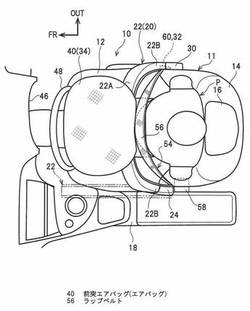
【課題】通常時に着座乗員に与える圧迫感を抑えつつ、車両前面衝突時の初期拘束性能を向上することができる車両用乗員拘束装置を得る。
【解決手段】車両用乗員拘束装置10は、使用位置で着座乗員Pの腹部の前方に非接触で位置するラップバー22と、ラップバー22に設けられインフレータからのガス供給により着座乗員Pの上体とステアリングホイール48又はインストルメントパネル46との間で展開される前突エアバッグ40と、プリテンショナ装置58の作動によりラップバー22から離脱可能に該ラップバー22に保持されたラップベルト56と、前面衝突の予測又は検知でプリテンショナ装置を作動させ、前面衝突の検知でインフレータを作動させる乗員保護ECUと、を備えている。
(もっと読む)
車両用トルクロッド及びパワーユニットの支持構造

【課題】複数の共振モードが発生しても振動を低減させることができる。
【解決手段】トルクロッド23は、長手方向の一端部がモータユニット(パワーユニット)12に取り付けられる。トルクロッド本体24の長手方向の中間に錘部材200を設けると共に錘部材200の重さを適宜調整して、並進系の共振モードの共振周波数と回転系の共振モードの共振周波数とを十分に離すことで振動を低減させている。したがって、錘部材200を設けていない場合よりも、トルクロッド本体24の振動が低減し、NV性能が向上する。
(もっと読む)
車両用シート及び車両用シート装置
【課題】呼吸センサからの出力信号を安定させることが課題である。
【解決手段】車両用シート12は、シートバック18のクッション層を構成する軟質ウレタンフォーム22と、フィルム状の圧力センサとされ、シートバック18におけるシート幅方向中央部であって着座乗員の胸郭60に対応する高さに配置されると共に、軟質ウレタンフォーム22のシート前側に設けられた呼吸センサ26と、軟質ウレタンフォーム22よりも硬質とされ、呼吸センサ26の全体をシート前側から覆う硬質ウレタンフォーム28と、硬質ウレタンフォーム28よりも軟質とされ、硬質ウレタンフォーム28の全体をシート前側から覆うスラブウレタンフォーム30と、を備えている。
(もっと読む)
車両
【課題】外部に設けられた送電部から電力を非接触で受電する受電部を有する車両において、受電時に生じる熱で触媒装置を暖機することができる車両を提供する。
【解決手段】車両は、内燃機関と、内燃機関に接続され、内燃機関からの排気ガスが流通する排気管35,36と、排気管35,36に接続された触媒装置33と、電力を蓄電する蓄電器15と、外部に配置された送電装置から電力を非接触で受電して、蓄電器15に電力を供給する受電部27とを含む電力蓄積ユニット9とを備え、受電部27は、触媒装置33の下部に配置される。
(もっと読む)
動力出力装置の制御装置および制御方法
【課題】エンジンの出力軸に少なくともねじれ要素を介して接続された電動機により当該エンジンの回転数をより精度良く制御してエンジンからの振動や騒音をより良好に抑制する。
【解決手段】エンジン22が運転されるときには、モータMG1の回転数Nm1が取得されると共に、取得された回転数Nm1をねじれ要素としてのダンパ28のねじれ角θdに基づいて補正することにより制御用回転数Nmc1が算出され(ステップS130〜S150)、エンジン22の目標回転数Ne*に基づいて設定されるモータMG1の目標回転数Nm1*と制御用回転数Nmc1との差がなくなるようにモータMG1が制御される(ステップS160〜S200)。
(もっと読む)
走行進路生成装置および走行制御装置
【課題】 生成した走行進路に基づいて実進路の走行を行うにあたり、実進路をスムーズなものとし、車両の乗員に与える違和感を小さくすることができる走行進路生成装置および走行制御装置を提供する。
【解決手段】 走行進路生成ECU10における走行進路演算部13は、ルート算出部12で算出したルート12に含まれる今回目標通過点と、走行進路記憶部14に記憶された前回走行進路に含まれる前回目標通過点を用いて、今回走行進路を生成する。ここで、前回目標通過点には、車両の近傍における固定目標通過点と固定目標通過点以外の探索目標通過点が含まれており、今回走行進路を生成するにあたり、固定目標通過点は固定とし、探索目標通過点を適宜今回目標通過点に変更して今回走行進路を生成する。
(もっと読む)
走行進路生成装置および走行制御装置
【課題】 無駄な計算処理を少なくするとともに、計算に要する時間を短くすることができる走行進路生成装置および走行制御装置を提供する。
【解決手段】 走行進路生成ECU10における一時的到達位置算出部11は、走行進路算出時間と制限車速に基づいて、一時的到達位置距離を算出し、一時的到達位置距離に含まれる各位置の中から一時的到達位置を算出する。この一時的到達位置と、自車両の位置とを繋いで、走行進路を生成する。
(もっと読む)
走行進路生成装置および走行制御装置
【課題】 走行進路を所定の時間内で生成することができ、たとえば自車両を停止させる制御を行わずに済ませることができるとともに、所望の走行進路の精度をある程度維持することができる走行進路生成装置および走行制御装置を提供する。
【解決手段】 走行進路生成ECU10は、走行進路を生成する走行進路演算部13を備えている。走行進路演算部13では、自車両位置と目標到達位置に基づいて、デフォーメーション法によって走行進路を生成する。また、デフォーメーション法による走行進路の解が所定時間内に発見できない場合に、デフォーメーション法よりも演算時間が短いステッププランナ法によって走行進路を生成する。
(もっと読む)
走行車線判別装置
【課題】先行車両が自車線走行車両であるか否かを高精度に判別する。
【解決手段】走行車線判別装置は、自車両の速度パターンを特定する第1特定手段と、他車両の速度パターンを特定する第2特定手段と、他車線走行車両の速度パターンを特定する第3特定手段と、特定された自車両の速度パターンと他車両の速度パターンとの類似度としての第1類似度を判定する第1判定手段と、前記判定された第1類似度と所定の判別基準とに基づいて前記他車両が自車線走行車両であるか否かを判別する判別手段と、特定された自車両の速度パターンと他車線走行車両の速度パターンとの類似度としての第2類似度を判定する第2判定手段と、前記判定された第2類似度が高い程前記他車両が前記自車線走行車両であると判別され難くなるように、前記判定された第2類似度に応じて前記判別基準を変更する変更手段とを具備する。
(もっと読む)
ハイブリッド車
【課題】バッテリの出力電圧を計測する電圧センサの計測値が異常値を示した場合、バッテリレス走行に移行した後に、電圧センサが故障しているか否かをチェックし、電圧センサが故障している場合にはバッテリレス走行から通常走行に戻すハイブリッド車を提供する。
【解決手段】ハイブリッド車100のコントローラ9は、以下の処理を実行する。低圧側電圧センサ4の計測値が閾値電圧を下回った場合にはEVモードを禁止し、第1モータ8が発電した電力と、第2モータ18を含む電気デバイスの消費電力との収支がバランスするように第1インバータ7を制御する。コンバータ5の低圧側と高圧側を短絡し、低圧側電圧センサ4と高圧側電圧センサ6の計測値が一致する場合はEVモード禁止を維持する。コンバータ5の低圧側と高圧側を短絡したにも関わらず低圧側電圧センサ4の計測値が高圧側電圧センサ6の計測値よりも低い場合はEVモード禁止を解除する。
(もっと読む)
151 - 160 / 59,920
[ Back to top ]