
日産自動車株式会社により出願された特許
91 - 100 / 16,386
正極活物質の製造方法
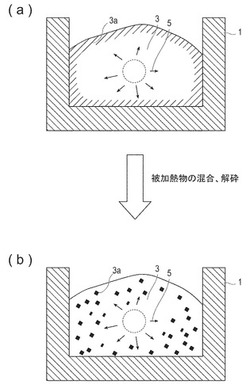
【課題】乾式法での電磁波加熱を用いた正極活物質の製造方法において、被加熱物の温度履歴を均一化することができ、単相で高純度の正極活物質を得ることができる、正極活物質の製造方法を提供する。
【解決手段】電磁波加熱を用いる正極活物質の製造方法において、複数回の電磁波照射の間に、被加熱物を解砕および混合することを特徴とする電気デバイス用正極活物質の製造方法により達成される。
(もっと読む)
正極活物質の製造方法

【課題】乾式法および電磁波加熱を用いた正極活物質の製造方法において、高純度の正極活物質を得るための手段を提供することを目的とする。
【解決手段】第一の容器と、当該第一の容器の外側に空間を隔てて存在する第二の容器とを有する二重構造の焼成容器を準備し、第一の容器に第一の正極活物質前駆体を入れ、第一の容器と第二の容器との間の空間に、第一の正極活物質前駆体と同一の金属元素を含有する第二の正極活物質前駆体またはその焼成物を入れる工程(A)と、焼成容器に入れた第一の正極活物質前駆体、および第二の正極活物質前駆体またはその焼成物に、電磁波を照射する工程(B)と、第一の容器の中の生成物を取り出し、当該生成物を解砕する工程(C)とを有する正極活物質の製造方法。
(もっと読む)
正極活物質の製造方法
【課題】乾式法および電磁波加熱を用いた正極活物質の製造方法において、高純度の正極活物質を得るための手段を提供することを目的とする。
【解決手段】正極活物質前駆体に電磁波を照射する工程(A)と、工程(A)で得られた反応物から、塊状の生成物とそれ以外の残留物とを分離する工程(B)と、工程(B)で分離した残留物に電磁波を照射する工程(C)と、工程(B)で分離した生成物および工程(C)で得られた生成物を解砕する工程(D)とを有する、正極活物質の製造方法。
(もっと読む)
制振制御装置
【課題】フィルタへの余剰トルク成分の蓄積を抑制する制振制御装置を提供する。
【解決手段】車両に設けられたモータを制振させる制振制御装置において、車両の車両情報を入力として、車両へのトルク入力と前記モータの回転速度の理想伝達特性のモデルGm(s)と、車両へのトルク入力とモータの回転速度の実伝達特性のモデルGp(s)とを用いたモデルGm(s)/Gp(s)を含むフィルタにより第1トルク目標値を算出する第1トルク目標値算出手段と、モータの回転速度を検出するモータ回転速度検出手段と、モデルGp(s)を含むフィルタを用いて、トルク指令値及び回転速度検出手段により検出された検出回転速度に基づいて、第2トルク目標値を算出する第2トルク目標値算出手段と、第1トルク目標値と前記第2トルク目標値とを加算してトルク指令値を算出する加算手段と、トルク指令値に基づいて、モータを制御するモータ制御手段とを備える。
(もっと読む)
電力変換装置
【課題】電力変換装置に含まれる回路の故障箇所を特定することができる電力変換装置を提供する。
【解決手段】 電源の正負両端に接続される電源線P、Nの間に、接続されたスイッチング素子Q1〜Q6と、スイッチング素子Q1〜Q6の順方向導通時に流れる電流の向きと逆方向で、スイッチング素子Q1〜Q6と並列に接続されたダイオードD1〜D6と、スイッチング素子Q1〜Q6の低電位側端子とダイオードD1〜D6のアノード端子との接続点よりもスイッチング素子側に接続され、電流を検出する電流検出手段と、電流検出手段によって検出された検出電流に基づいてスイッチング素子Q1〜Q6の故障を検出する故障検出手段とを備える。
(もっと読む)
車両の操舵支援装置及び操舵支援方法
【課題】操舵操作に対する運転者の意図の反映度合いが低下することを抑制可能な、車両の操舵支援装置及び操舵支援方法を提供する。
【解決手段】自車両が有する操舵輪の目標とする回転角度である目標操舵角を算出し、操舵輪の現在の回転角度である現在操舵角を検出し、目標操舵角と現在操舵角との差分である操舵角偏差を算出し、操舵角偏差を縮小させるための操舵支援トルクを算出し、自車両が走行する走行路上において、操舵輪の回転角度を目標操舵角とした状態で自車両が通過すると予測する目標経路上の点である目標点に自車両が到達した時点における、自車両の車幅方向右側及び車幅方向左側のうち少なくとも一方に存在する障害物と自車両との間の距離である余裕代を算出し、算出した余裕代が大きいほど小さい値に算出した操舵支援トルクを操舵輪へ出力する。
(もっと読む)
サスペンション装置
【課題】マルチリンク式サスペンションにおける各リンクの車体に対する位置精度を高める。
【解決手段】リアサスペンションメンバ21とリアアクスルハウジング11とは、リアアッパリンク19、フロントロアリンク25、リアロアリンク23及びラジアスロッド27で連結する。リアサスペンション装置1に荷重が掛かっていない状態で、フロントロアリンク25及びリアロアリンク23に張力を発生させ、その状態でリンク端部の各マウント部を締結する。張力を発生させる際には、フロントロアリンク25はキャンバ調整用のカム機構31を利用し、リアロアリンク23はトー調整用のカム機構29を利用する。
(もっと読む)
サスペンション装置
【課題】左右の操舵輪で車両重量を受ける割合が互いに異なる場合であっても、車両走行時での操舵特性に左右差が生じるのを抑える。
【解決手段】ラジアスロッド57の前端57a及び後端57bを、車体側のサスペンションメンバ53及び後輪7,9のリアアクスルハウジング45に、外筒、内筒及びゴムブッシュを有するマウント部材59及び61を介してそれぞれ連結する。左右の前輪3,5のうち車両重量を受ける割合が低いほうの前輪3に対角する位置にある右後輪9が、サスペンション装置に荷重が掛かっていない状態で、左後輪7よりも車体に対して下方位置となるようラジアスロッド57を連結する。サスペンション装置に荷重が掛かっている実車状態では、ゴムブッシュはねじりが付与されて弾性変形した状態となる。
(もっと読む)
運転支援装置
【課題】修正操舵を抑えつつ車線に沿った安定した走行を可能とする。
【解決手段】ステアリングバイワイヤ方式の操舵装置を備える。運転者が操舵する操作子の操舵量の変化に伴い周期的に付与操舵反力を操作子に入力し、一方向に向けた連続する操舵入力中に発生した上記付与操舵反力の数を検出する。そして、本発明は、検出した付与操舵反力の数に応じて、車線に沿って走行するための走行経路を選択し、選択した走行経路に沿って走行するように転舵輪4の転舵を制御する。
(もっと読む)
路面摩擦係数推定装置
【課題】ノイズの影響を大きく受ける場合において路面摩擦係数を正確に推定し得るような路面摩擦係数推定装置を提案する。
【解決手段】連続値変換部B3b-1は、離散時間周波数伝達特性G(z)を連続時間周波数伝達関数G(s)に変換し、位相情報抽出部B3b-4は、所定の位相情報抽出周波数f[Hz]と連続時間周波数伝達関数G(s)とから、当該周波数f[Hz]でのヨーレート位相遅れ情報θ(f|t)[deg]を抽出する。この位相遅れ情報θ(f|t)[deg]から、予定の路面摩擦係数マップを基に、走行路の路面摩擦係数を検索する。上記位相情報抽出周波数f[Hz]を操舵角の基本周波数よりも高い所定の周波数に決定することで、ノイズの影響を受けにくい操舵周波数における情報のみを用いたり、路面変化に対する感度が高い操舵周波数における情報のみを用いることができ、ノイズが多い場合においても、路面摩擦係数を正確に求める得る。
(もっと読む)
91 - 100 / 16,386
[ Back to top ]