
日産自動車株式会社により出願された特許
111 - 120 / 16,386
車両用制動力制御装置
【課題】ブレーキ操作時であって、マスターシリンダピストンの移動速度であるピストン速度が速いとき、ドライバーに与えるブレーキ操作違和感を防止すること。
【解決手段】車両用制動力制御装置は、ブレーキペダル1と、電動ブースタ2と、マスターシリンダ3と、乖離量算出部60と、ペダル踏力算出部61と、目標減速度算出部69と、を備える。乖離量算出部60は、プライマリピストン11のピストン速度が速いほど大きくなるペダル踏力の過渡的変化分を補正値Hとして算出する。ペダル踏力算出部61は、マスターシリンダ圧に基づくペダル踏力(e-ACT反力)を、補正値Hにより補正することで制御用ペダル踏力を算出する。
(もっと読む)
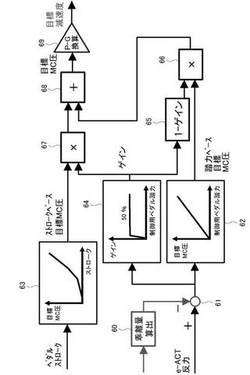
車両用制動力制御装置

【課題】ブレーキ操作時、ドライバーによるペダル操作状態にかかわらず、ドライバーに与えるブレーキ操作違和感を防止すること。
【解決手段】車両用制動力制御装置は、ブレーキペダル1と、電動ブースタ2と、マスターシリンダ3と、第1目標MC圧分算出部66と、第2目標MC圧分算出部67と、S-P変化率算出部70と、F-P変化率リミット部71と、目標減速度算出部69と、を備える。S-P変化率算出部70は、ストロークベース目標MC圧分の算出に至るまでの演算処理系列にて得られるストローク相当値としてのストロークベース目標MC圧の変化率を算出する。F-P変化率リミット部71は、踏力ベース目標MC圧分の算出に至るまでの演算処理系列にて得られる踏力相当値である踏力ベース目標MC圧の変化率を、ストロークベース目標MC圧の変化率が小さいほど制限する。
(もっと読む)
ブレーキ制御装置
【課題】ブレーキ踏み上げ操作の際、ペダルストロークに対するホイールシリンダ液圧特性が段付き特性になるのを抑えることで、制動減速度のフィーリングを向上すること。
【解決手段】ブレーキ制御装置は、マスターシリンダ13と、VDCブレーキ液圧ユニット2と、ブレーキスイッチ93と、ブレーキコントローラ7と、を備える。VDCブレーキ液圧ユニット2は、両M/Cカットソレノイドバルブ25,26と、低圧リザーバ23からブレーキ液を吸い込む液圧ポンプ22と、によりポンプアップ液圧を発生する。ブレーキコントローラ7は、ブレーキ踏み上げ操作の際、少なくともマスターシリンダ13内のブレーキ液が低圧リザーバ23に流れ込むストローク位置S2から、ホイールシリンダ液圧の低下が終わるストローク位置S3までを含むストローク領域において、ペダルストロークの上昇に対して滑らかな勾配にて前記ホイールシリンダ液圧が増加するように両M/Cカットソレノイドバルブ25,26を制御する(図3)。
(もっと読む)
ブレーキ制御装置
【課題】ブレーキ操作時、ペダルストロークに対するホイールシリンダ液圧特性の段付きとペダル反力の変動を小さく抑えることで、ペダルフィールの違和感を緩和すること。
【解決手段】ブレーキ制御装置は、マスターシリンダ13と、VDCブレーキ液圧ユニット2と、マスターシリンダ液圧センサ24と、ブレーキコントローラ7と、を備える。VDCブレーキ液圧ユニット2は、ブレーキ液を吸い込んで吐出する液圧ポンプ22によりポンプアップ液圧を発生する。マスターシリンダ液圧センサ24は、運転者によるブレーキ操作速度を検知する。ブレーキコントローラ7は、ブレーキ操作速度が所定値以上の場合、ポンプアップ液圧によりホイールシリンダ4FL,4FR,4RL,4RRへの液圧を所定値まで増加させる際、ペダルストロークがリザーバポートの閉鎖位置に達するまでのポンプアップ液圧増加速度よりも、ペダルストロークがリザーバポートの閉鎖位置を通過した後のポンプアップ液圧増加速度を遅くする(図3)。
(もっと読む)
電動車両のブレーキ制御装置
【課題】回生協調ブレーキ制御時、ブレーキパッドとロータとの間にクリアランス変化が発生しても、良好なブレーキフィーリングと回生エネルギーの確保を達成すること。
【解決手段】ハイブリッド車のブレーキ制御装置は、マスターシリンダと、ホイールシリンダと、VDCブレーキ液圧ユニットと、モータコントローラと、統合コントローラと、を備える。統合コントローラは、ブレーキ操作時、目標減速度を基本液圧分と上乗せ制動分(回生分と加圧分)で達成する回生協調ブレーキ制御を行う。そして、推定したブレーキパッドとロータとの間のクリアランス量が設計値のクリアランス量に対して変化する場合に、実MC圧発生ポイントでの目標減速度が、上乗せ制動分の最大値となるように、設計値からのクリアランス変化量に応じて目標減速度特性を設定する。
(もっと読む)
車両用制動力制御装置
【課題】ブレーキペダルのペダルストローク量にノイズが混入したときであっても、ブレーキフィーリングの悪化を防止すること。
【解決手段】車両用制動力制御装置は、ブレーキペダル1と、電動ブースタ2と、ストロークセンサ18と、マスターシリンダ圧力センサ19と、倍力装置指令値演算手段61と、平滑化処理手段63と、を備える。ストロークセンサ18で検出されたペダルストローク量と、マスターシリンダ圧力センサ19で検出されたマスターシリンダ圧力と、から倍力装置指令値演算手段61によって倍力装置指令値が演算されて、演算された倍力装置指令値に、平滑化処理手段63によって平滑化処理を施して、電動ブースタ2の動作量とする。
(もっと読む)
ハイブリッド車両の制御装置
【課題】減速要求中、エンジン回転数の低下を遅らせることで再加速要求への移行に備えること。
【解決手段】ハイブリッド車両の制御装置は、エンジンEngと、ベルト式無段変速機構3と、ローブレーキL/B又はハイクラッチH/Cと、モータ・ジェネレータM/Gと、左右駆動タイヤLT,RTと、統合コントローラ59と、を備える。ローブレーキL/B又はハイクラッチH/Cは、ベルト式無段変速機構3の下流側の位置に配置され、開放することにより動力伝達を遮断する。モータ・ジェネレータM/Gは、ローブレーキL/B又はハイクラッチH/Cの下流側の位置に配置され、駆動・回生に用いられる。統合コントローラ59は、エンジンEngへの燃料噴射を停止する減速要求時、ローブレーキL/B又はハイクラッチH/Cを開放した後、ベルト式無段変速機構3の変速比をロー側へ変速する減速時制御を行う。
(もっと読む)
自動車の車体構造
【課題】車両旋廻時、車両後部が車両前部よりも旋廻外側に張り出すことを防止し、外輪差を気にすることなく運転できる自動車の車体構造を提供すること。
【解決手段】本発明の自動車の車体構造は、前輪3L,3Rの舵角θ2よりも後輪4L,4Rの舵角θ1が逆位相で相対的に大舵角とする舵角制御手段5と、右旋廻時に右側最大車体基準円11の内側に収まり、左旋廻時に左側最大車体基準円21の内側に収まる外側形状を有する車体2と、を有する。そして、右側最大車体基準円11は、右旋廻時最小回転半径の中心位置Pを中心点とし、車幅方向中心位置Oをはさんで中心位置Pと反対側の車体2上に設定する左車体基準点10を通る。また、左側最大車体基準円21は、左旋廻時最小回転半径の中心位置Qを中心点とし、車幅方向中心位置Oをはさんで中心位置Qと反対側の車体2に設定する右車体基準点20を通る。
(もっと読む)
車両用前後輪転舵制御装置
【課題】ステアリング操作による前後輪自動追従制御時、ステア角とヨーレートの比例関係を保つことで、ドライバーに与える操作違和感を軽減すること。
【解決手段】車両用前後輪転舵制御装置は、前輪11,11及び後輪12,12がステアリング操作とは独立して転舵可能である4WS車1において、軌跡演算機21及び後輪舵角演算機22と、前輪舵角演算機23と、を備える。軌跡演算機21及び後輪舵角演算機22は、4WS車1の進行方向側に設定した車両前部定点αの軌跡を、4WS車1の進行方向とは反対側に設定した車両後部定点βがトレースするように、後輪転舵角ψを制御する。前輪舵角演算機23は、ステアリング操作による操舵角Θに基づく前輪転舵角(k1Θ)を、前後輪転舵角差を減じるように、後輪転舵角ψに応じて補正制御する。
(もっと読む)
車両用走行支援装置
【課題】 車線逸脱の抑制とドライバに与える違和感の軽減との両立を図ることができる車両用走行支援装置を提供する。
【解決手段】 走行路上の自車前方に、車速Vに応じた前方注視点距離Lsだけ離れた目標走行位置Pを設定し、自車が設定した目標走行位置Pを走行するように自車の走行を支援する車両用走行支援装置において、走行路に対する自車の向きを判定する姿勢判定部14aと、自車が走行路外側を向いている場合、自車の向きが走行路と平行である場合よりも車速Vに応じた前方注視点距離のベース値Ls_baseを短縮した前方注視点距離Lsを設定する前方注視点距離設定部14と、を備えた。
(もっと読む)
111 - 120 / 16,386
[ Back to top ]