
富士重工業株式会社により出願された特許
1,131 - 1,140 / 3,010
運転支援装置
【課題】カーブ進入時における運転者の違和感を軽減した運転支援装置を提供する。
【解決手段】車両の運転を操舵トルクの付与により支援する運転支援装置において、車速検出手段120と、操舵角、ヨーレート、求心加速度の少なくとも1つを検出する操舵実際値検出手段130と、カーブの曲率を取得するカーブ曲率取得手段110と、操舵目標値を算出する操舵目標値算出手段160と、操舵機構10へ操舵トルクを付与する操舵制御を実行する操舵制御手段170と、操舵目標値と操舵実際値に基づいて操舵制御の実行を予測する操舵制御予測手段180と、操舵制御の実行が予測される時に操舵制御の実行に先立って第1の減速制御を実行する第1の減速制御手段180とを備える構成とする。
(もっと読む)
操舵輪舵角制御における補償値取得方法および操舵輪舵角制御における補償方法

【課題】操舵系における摩擦や車体の持ち上がり、持ち下がり等の外乱要素を総合的に取り込んで操舵輪舵角制御における電動操舵アクチュエータの出力値を的確に補償する補償値を取得することが可能な操舵輪舵角制御における補償値取得方法を提供する。
【解決手段】操舵輪舵角制御における補償値取得方法では、電動操舵アクチュエータ6から操舵系に出力する出力値τを変化させた場合のステアリングホイール2等の舵角δのデータを取得し、舵角δのデータが変化し始める際、および舵角δのデータが変化し終わる際の舵角δと出力値τとの各相関に基づいて操舵系における静止摩擦ポテンシャル特性および動摩擦ポテンシャル特性を取得し、操舵系における静止摩擦ポテンシャル特性および動摩擦ポテンシャル特性をそれぞれ数式的にモデル化して、操舵系における静止摩擦発生時および動摩擦発生時の出力値τに対する各補償値τcをそれぞれ取得する。
(もっと読む)
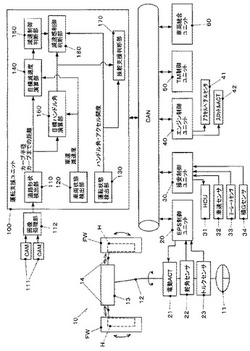
エアーブロー装置
【課題】被処理物に形成された有底穴の内部から異物を確実に除去し得るエアーブロー装置を提供する。
【解決手段】エアーブロー装置は、被処理物としてのシリンダブロックWに形成されたねじ穴H内から異物を除去するために適用されている。底付き穴としてのねじ穴H内にはノズル24が軸方向に挿入されるようになっており、ノズル24にはエアー供給部からエアーが供給される。ノズル24の先端部にはこれよりも大径の拡径部41が設けられており、この拡径部41とねじ穴Hの内周面との絞り流路の断面積は、開口部27の断面積よりも小さくなっている。開口部から吐出したエアーは、絞り流路で絞られた後に拡径部41を通過すると膨張して流速が低下する。流速が変化して脈動となってエアーがねじ穴Hの内周面に吹き付けられて異物の除去が行われる。
(もっと読む)
車両の前部車体構造
【課題】車両衝突時にキャビンを保護するために有効な抗力を発生させることができる車両の前部車体構造を提供する。
【解決手段】フロントドア20の閉成時に、前端部がトーボードクロスメンバ11に対向するとともに後端部がサイドシル13の湾曲部13cに対向するようドアビーム本体22を配置する。ドアビーム本体22の前後端部に突出・退避移動自在な第1,第2のビーム部材23,24を連結し、これらを突出方向に動作させてトーボードクロスメンバ11及び湾曲部13cの各嵌合用凹部25a,25bとの嵌合位置でロックすることにより、車両衝突時にトーボードクロスメンバ11及びサイドシル13等に対するドアビーム21の相対位置を保持する。
(もっと読む)
加圧成形パッド
【課題】オス型に積層した繊維強化樹脂複合材の積層体の外側に被せて用いられる加圧成形パッドの加圧成形時に必要な弾性特性を損なわず、着脱や成形使用の繰返しにおいて変形の激しい部分の損傷を防止する。
【解決手段】本発明の加圧成形パッドは、オス型治具4の頂部bに跨って被せられるゴム製の加圧成形パッド15であって、表面のうち、頂部の曲率の大きい一端部に合わせられる部分の外表面のみに、目の空いた織物14が接着され、織物が接着される表面以外の表面にゴム材が露出するとともに内部がゴム材のみで構成されてなる。織物は、構成糸14a1本の太さ以上の間隔に目の空いたものとする。本パッドは、頂部の曲率の大きい一端から他端側に移るに従って当該頂部の曲率が小さくなるオス型の形状に倣って曲率が変化する形状を有し、前期一端相当位置から他端側に移るに従って織物の構成糸が太く、織物の目が粗くなっている。
(もっと読む)
電源制御装置
【課題】新たな充電回路を追加せずに低下したサブ蓄電体の電圧を回復させる。
【解決手段】蓄電ユニット(電源電圧Vu)には、メイン蓄電体(電圧Vm)とサブ蓄電体(電圧Vs)とが設けられるとともに、これら蓄電体の接続状態を切り換えるリレースイッチS1,S2が設けられる。リレースイッチS1,S2を直列解除状態に切り換えると、メイン蓄電体からサブ蓄電体が切り離される一方、リレースイッチS1,S2を直列接続状態に切り換えると、メイン蓄電体にサブ蓄電体が直列接続される。この蓄電ユニットを充放電させる際には、電源電圧Vu(Vu=Vm)が下限電圧A1に達したときに(符号a)、リレースイッチS1,S2が直列接続状態に切り換えられ、電源電圧Vu(Vu=Vm+Vs)が上限電圧A2に達したときに(符号c)、リレースイッチS1,S2が直列解除状態に切り換えられる。これにより、サブ蓄電体の電圧Vsを引き上げることが可能となる。
(もっと読む)
車両の運転支援装置
【課題】実際の回避走行に沿った目標自車進路を設定して自然な運転支援を行う。
【解決手段】制御ユニット5は、対象物と自車両1との相対速度Vfと対象物の種類に応じて対象物からの横移動量Wを設定し、対象物からの横移動量Wと距離dとに基づいて目標自車進路を推定し、最大横加速度(d2y/dt2)maxを推定する。そして、最大横加速度(d2y/dt2)maxが、警報制御閾値Ca以上の場合は警報制御を行ない、ブレーキ制御閾値Cb以上の場合は警報制御を行うと共にブレーキ制御を行う。また、許容最大横加速度(d2y/dt2)max_cを設定し、許容最大横加速度(d2y/dt2)max_cと対象物からの横移動量Wと自車速Vとに基づいて限界自車進路を推定して必要横加速度(d2y/dt2)cを演算し、実横加速度(d2y/dt2)rと必要横加速度(d2y/dt2)cとに基づいて操舵制御を行う。
(もっと読む)
ステアリングパラメータ最適化システム
【課題】市場において実際に車両を運転する個々のドライバの特性に合わせたステアリングの味付けを実現する。
【解決手段】車両特性同定部10で車両モデルのパラメータを同定すると共にドライバ特性同定部20で現在のドライバの運転特性を表現するドライバパラメータを同定する。これらの車両パラメータ及びドライバパラメータは修正操舵量推定部30に出力されてドライバ−車両系のモデルによるシミュレーションが実施され、ドライバの目標走行軌跡に対する修正操舵量が計算される。修正操舵量推定部30の推定結果はパラメータ学習部40で学習され、この学習によって最適化された修正操舵量がパラメータ適応部50に出力されてステアリングパラメータの変更量が決定される。これにより、市場において実際に車両を運転する個々のドライバの特性に合わせたステアリングの味付けを実現することができる。
(もっと読む)
リスク融合認識システム
【課題】並列に動作する複数のリスク要素認識からの情報を総合的に判断して実際の運転環境に適応した認識を可能とし、個々のドライバに最適な安全運転環境を実現する。
【解決手段】シーンリスク認識部2で外界を撮像した画像情報から画像全体のリスク分布を認識し、抽出リスク認識部3で画像中のリスク対象を認識する。そして、互いに独立して動作するシーンリスク認識部2及び抽出リスク認識部3の各認識結果を、リスク融合部4の処理結果ベクトル生成部41でベクトルデータ化し、このベクトルデータを入力データとして融合リスク認識部42で総合的なリスクを認識し、音声装置5や画像表示装置6へ出力してドライバへの警告や情報伝達を行うことで、複数のリスク要素認識からの情報を総合的に判断して実際の運転環境に適応した認識を可能とし、個々のドライバに最適な安全運転環境を実現する。
(もっと読む)
車線逸脱防止装置
【課題】運転者による保舵状態を短時間で適切に判定できる車線逸脱防止装置を提供する。
【解決手段】車線逸脱防止装置を、自車両の走行車線を設定する車線設定手段110と、運転者の操舵操作による操舵角を検出する操舵角検出手段150と、運転者の操舵操作による入力トルクを検出するトルク検出手段140と、走行車線からの自車両の逸脱傾向を判定する逸脱判定手段130と、逸脱判定手段が逸脱傾向を判定した場合に、逸脱を防止する方向へ操舵機構10にパルス状の操舵トルクを付与する操舵制御手段170と、パルス状の操舵トルクを付与した際の操舵角の変位量が所定の閾値以上であり又は入力トルクが所定の閾値以下の場合に運転者による保舵状態低下を判定する保舵状態検出手段160とを備える構成とする。
(もっと読む)
1,131 - 1,140 / 3,010
[ Back to top ]