
キャタピラー インコーポレイテッドにより出願された特許
41 - 50 / 296
無限軌道式機械のためのアイドラと車台アセンブリ
無限軌道式機械(13)の車台アセンブリ(10)のアイドラ(25)が開示される。車台アセンブリは少なくとも2つのリンク(55)を有していてもよく、これらはカートリッジ(34)によって相互連結されていてもよい。カートリッジは、ピン(43)の周囲に配置され、これに関して回転可能なブッシュ(37)を有していてもよい。リンクの少なくとも1つは、リンクレール摩耗面(61)を有していてもよく、この摩耗面は、ブッシュから当初摩耗面高さ(82)の位置に位置付けられていてもよい。アイドラは下側面(67)を有していてもよく、下側面はリンクレール摩耗面に当たって摩耗するように構成されていてもよい。アイドラはまた、上側面(70)を有していてもよく、上側面はブッシュに当たって摩耗するように構成されていてもよい。上側面は、下側面から半径方向に、当初上側面高さ(85)の分だけ外側に位置付けられていてもよい。当初上側面高さは、当初摩耗面高さの約70%と約90%の間であってもよい。  (もっと読む)
(もっと読む)
ピストン作動式分割入力トランスミッションシンクロナイザ
分割トルクトランスミッションのためのピストン作動式シンクロナイザシステムであって、ピストンは、シンクロナイザの中心線上のシンクロナイザシフトカラーに直接取り付けられて、小さな空間で必要な作動を実現し、そのようなシステムを使用するその他のシンクロナイザに見られるフォークとロッドの変形の問題を解決する。ピストンは、圧力が印加され、バネで解放される。この設計はまた、シンクロナイザの係合をモニタするための変位センサも使用する。  (もっと読む)
(もっと読む)
フィード・フォワード制御を利用する油圧制御システム
本開示は、油圧制御システムに関する。本システムは、ポンプと、ポンプによって提供される加圧流体流によりツールを移動させるように構成されるツールアクチュエータとを有することができる。本システムは、ツールアクチュエータへの加圧流体流を制御するように構成されるツール制御弁をさらに有することができる。本システムはまた、ツール制御弁およびポンプに動作可能に接続されるコントローラも有することができる。コントローラを、ツール移動要求を受け取るように構成することができる。コントローラを、さらに、ツール移動要求に関連するツール制御弁にわたる流量要求の変化を推定するように構成することができる。コントローラを、ツール移動要求を満たすように流量要求の推定された変化に基づいてポンプの吐出流量の調整を命令するように構成することも可能である。  (もっと読む)
(もっと読む)
キャブマウントを用いる機械及び機械位置に基づくキャブマウントの制御方法
制御自在マウント(106)を用いる機械(100)、及び機械位置に基づくかかるマウント(106)の制御方法が開示される。制御自在マウント(106)は、ハウジング(108)と、ピン(120)と、ハウジング(108)内のレオロジー流体(116)と、レオロジー流体(116)に近接して提供されたコイル(131)とを含み得る。コイル(131)に電流が印加されるとレオロジー流体(116)の見掛け粘度が増加し、それにより制御自在マウント(106)の剛性も増加する。しかしながら、機械位置によっては、操作者は制御自在マウント(106)の1つ又は複数において異なるレベルの剛性を求め得る。例えば、岩地で道路整地を行う際、操作者は、大きい振動入力を吸収し、より快適性の高い乗り心地を生じさせるため、比較的弛緩したマウント(106)を求め得る。従って本開示は、全地球測位衛星情報、地形図、傾斜計、高度計、操作者入力などを介して機械位置を特定し、それに従いコイルに対する電流、ひいては制御自在マウントの相対的な剛性及び減衰性を制御する。 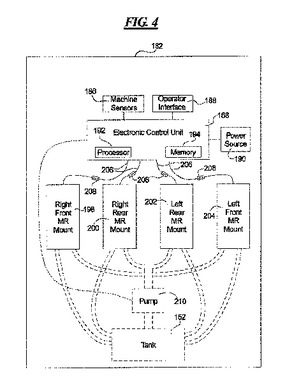 (もっと読む)
(もっと読む)
キャブマウントを用いる機械及び機械動作に基づくキャブマウントの制御方法
制御自在マウント(106)を用いる機械(100)、及び機械動作に基づくかかるマウント(106)の制御方法が開示される。制御自在マウント(106)は、ハウジング(108)と、ピン(120)と、ハウジング(108)内のレオロジー流体(116)と、レオロジー流体(116)に近接して提供されたコイル(131)とを含み得る。コイル(131)に電流が印加されると、レオロジー流体(116)の見掛け粘度が増加し、その際、制御自在マウント(106)の減衰及び剛性の特性がそれに従う。仕上げの地ならし、耕起及び積み込みなどの特定の機械動作では、これは、操作者が所与の作業をより迅速に又は効率的に行うのに役立ち得る。道路整地又は平坦な表面での作業などの他の動作では、マウント(106)により提供されるフィードバックは操作者の快適性ほど重要ではなく、その場合、コイル(131)に印加される電流を低下させてもよく、従ってマウント(106)がより弛緩した状態となり得る。本開示の機械(100)は、センサ(270)、予測アルゴリズム(266)、器具(268)の位置、及び操作者入力(188)を介して行われている機械動作を特定し、それに従い制御自在マウント(106)の電流及び特性を設定する。 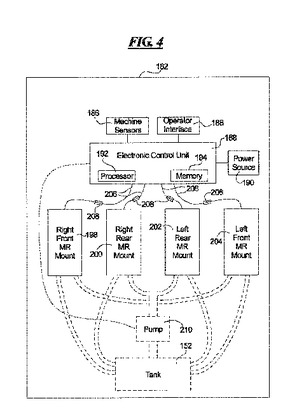 (もっと読む)
(もっと読む)
流体力を補償する油圧制御システム
機械(10)用の油圧制御システム(28)を開示する。油圧制御システムは、流体を加圧するように構成されるポンプ(38)と、ポンプの押しのけ容積に影響を与えるように構成される押しのけ容積制御弁(58)と、ポンプから加圧流体を受け取り、加圧流体を油圧アクチュエータに選択的に向けるように構成されるツール制御弁(68)とを有することができる。油圧制御システムはまた、押しのけ容積制御弁と通信するコントローラ(34)も有することができる。コントローラを、所望の圧力勾配とは実質的に異なる、ツール制御弁の前後の圧力勾配を確定し、その圧力勾配に基づいて押しのけ容積制御弁の所望の条件を確定し、所望の条件に基づいて押しのけ容積制御弁に加えられる流体力を確定するように構成することができる。コントローラを、さらに、所望の条件および流体力に基づいて押しのけ容積制御弁に向けられるロードセンシング応答信号を生成するように構成することができる。 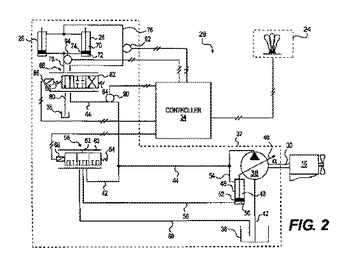 (もっと読む)
(もっと読む)
キャブマウントを用いる機械及び操作者入力に基づくキャブマウントの制御方法
制御自在マウント(106)を用いる機械(100)、及び操作者入力に基づくかかるマウント(106)の制御方法が開示される。制御自在マウント(106)は、ハウジング(108)と、ピン(120)と、ハウジング(108)内のレオロジー流体(116)と、レオロジー流体(116)に近接して位置決めされたコイル(131)とを含み得る。コイル(131)に電流が印加されると、レオロジー流体(116)の見掛け粘度が増加し、その際、制御自在マウント(106)の剛性及び減衰がそれに従う。様々な要因に依存して、操作者は特定のフィードバックレベルを求め得る。例えば、仕上げの地ならしを行うとき、操作者はあらゆる振動を感じ取りたいと思うことがあり、従って制御自在マウント(106)は可能な限り硬くなければならない。従って本開示は、操作者に所望のフィードバックレベルを選択する能力を提供する。これは、操作者が各マウント(106)に対して電流を具体的に設定したり、又は他の情報を入力したりすることを可能にする操作者インタフェース(188)を介して行われることができ、それを受けて制御システム(182)のプロセッサ(168)が、操作者に最適なフィードバックレベルを提供するのに必要なアルゴリズム(262)を実行する。 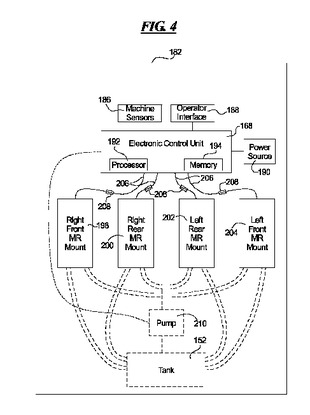 (もっと読む)
(もっと読む)
第2のリング溝に延在する通路を有するピストンアセンブリ
内燃機関のシリンダ内で往復するように構成されたピストンアセンブリを開示する。ピストンアセンブリは、頂面、円筒壁、第1のリング、第2のリング、および少なくとも1つの通路を備える。円筒壁は、頂面から延在し、かつ第1のリング溝、第2のリング溝、および第1のリング溝と第2のリング溝との間の第1のランドを含む。第1のリングは、第1のリング溝内に受容される。第2のリングは、第2のリング溝内に受容される。第2のリングは、シリンダに係合するように構成された外側表面と、外側表面に対向する内側表面とを含む。少なくとも1つの通路は、外側表面が曝されている第1の容積部を、内側表面が曝されている第2の容積部に流体連結する。  (もっと読む)
(もっと読む)
キャブマウントを用いる機械、及びスナッビング高さを維持し、且つマウント診断を提供するためのキャブマウントの制御方法
制御自在マウント(106)を用いる機械(100)、及び理想スナッビング高さ(144)を維持し、マウント診断を提供するためのかかるマウント(106)の制御方法が開示される。制御自在マウント(106)は、ハウジング(108)と、ピン(120)と、ハウジング(108)内のレオロジー流体(116)と、レオロジー流体(116)に近接して提供されたコイル(131)とを含み得る。ピン(120)は、エラストマー部材(124)により遊びの程度を制限されてハウジング(108)内に保持され、これによりピン(120)が理想スナッビング高さ(144)に保持され得る。時間が経つと、エラストマー部材(124)は分解し、弛み始め得る。ハウジングと連係するセンサ(160、170、214、222、226、230)がこの弛みを監視し、必要であればハウジング(108)内におけるレオロジー流体(116)にわたるフィールド又は加圧ガスを加え、それによりピン(120)の位置を調整して理想スナッビング高さ(144)に戻す。センサ(160、170、214、222、226、230)により収集されたデータはまた格納され、制御自在マウント(106)の残存使用可能寿命の判断及びそれを交換すべき時期の診断のために使用することができる。 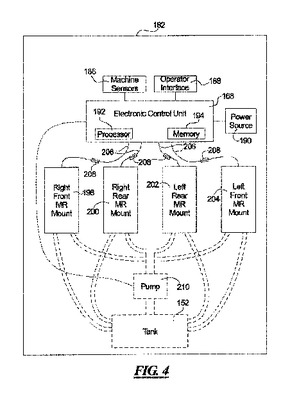 (もっと読む)
(もっと読む)
静止状態パワードローを低減するためのシステム及び方法並びにそれを使用した機械
機械(10)は、第1の電気回路(68)に沿って第1のリレー(72)を介して、且つ第2の電気回路(74)に沿って第2のリレー(76)を介して電源(62)に電気的に接続された複数の電子制御装置(70)を含む。リレー制御装置(78)が第3の電気回路(84)に沿って電源(62)に直接接続され、第1のリレー(72)及び第2のリレー(76)と通信している。リレー制御装置(78)は、パワー要求指示に応答して第1のリレー(72)又は第2のリレー(76)を開閉するように構成される。  (もっと読む)
(もっと読む)
41 - 50 / 296
[ Back to top ]