
キャタピラー インコーポレイテッドにより出願された特許
31 - 40 / 296
重量を釣り合わせた内燃機関ピストン
内燃機関用のピストンは、外側円筒状壁を有しかつピストンの胴体部分より上で胴体部分に連結されたピストン冠部を含む。ピストンは、外側円筒状壁に形成され、ピストン冠部の外周のまわりに延びる少なくとも1つのピストンリングシール溝と、外側円筒状壁内で、少なくとも1つのピストンリングシール溝より下に形成され、ピストンの外周全体のまわりに、少なくとも1つのピストンリングシール溝に対して平行に延びる第1のオイル収集溝とを含む。第1のオイル収集溝は、ピストンの中心線に沿って測定した第1の幅を有する。第2のオイル収集溝は、外側円筒状壁内で、第1のオイル収集溝より下に形成され、ピストンの外周全体のまわりに、第1のオイル収集溝に対して平行に延び、第1のオイル収集溝の幅の少なくとも2倍の幅を有する。  (もっと読む)
(もっと読む)
可動機械用のテザー追跡システムおよび同方法
可動機械(12)用のテザー追跡システム(28)が開示される。テザー追跡システムは、可動機械に配置されて、可動機械が作業現場を移動して回るときに、可動機械から固定供給源(14)まで延びるテザー(16)を選択的に取り出し、巻き取るスプール(26)を有することができる。テザー追跡システムはまた、スプールパラメータを示す第1の信号を生成する、スプールに付属する少なくとも1つのセンサ(32)と、可動機械の位置を示す第2の信号を生成する、可動機械に付属する位置特定システム(33)と、少なくとも1つのセンサおよび位置特定システムと通信するコントローラ(34)とを有することができる。コントローラは、第1および第2の信号に基づいて、テザー回避ゾーン(24)を定めるように構成することができる。 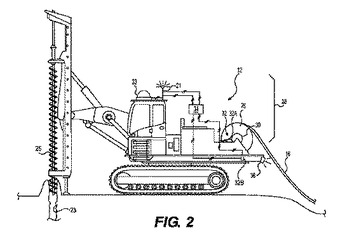 (もっと読む)
(もっと読む)
改良された磨耗表面のピンジョイントコンポーネント
本開示は、改良された磨耗表面を有するピンジョイントアセンブリのためのピンジョイントコンポーネントに対する。特には、スラストリング、へり、およびその他の近接する磨耗コンポーネントと接合するピンジョイントコンポーネントの部分に対する。ピンジョイントコンポーネントは、素材をピンジョイントコンポーネントの磨耗表面から除去し、被覆素材に置き換えることで形成される第1の処理領域を備える。この操作の前に、第2の処理領域が、第1の処理領域と異なるピンジョイントコンポーネントの部分から素材を除去し、その上に窒化処理を施すことにより形成される。  (もっと読む)
(もっと読む)
車輪速度を検知するシステムおよび方法
改良された速度感覚システムは、端部および軸とともに車軸を有する、トラックなどの装置のために開示される。装置は、車軸の端部に非回転自在に、かつ軸と同軸的に連結されたセンサをさらに含む。ホイールハブが、車軸に回転自在に連結され、ホイールカバーが、ホイールハブに連結される。装置は、軸と同軸状に配置され、車輪が回転する際の軸のまわりの回転のためにホイールカバーに連結された磁石をさらに含む。センサは、磁石および車輪の回転速度に基づいて信号を生成する。堅固である(または堅固なスピンドルを含む)回転しない車軸に対して、センサと電子コントロールモジュール(ECM)との間の通信回線のための通路が、容易にドリルにより設けられてもよい。それにより、開示されたシステムを既設機または車両に追加することを容易にする。  (もっと読む)
(もっと読む)
可変容量型液圧ポンプを制御する方法および装置
可変容量型液圧ポンプ用の制御システムが開示される。制御システムは2つの流れ制御弁を利用して、液圧流体の流れを2つの制御アクチュエータに供給する。制御アクチュエータは、ポンプ斜板に作用する反対方向のモーメントを生じさせて、斜板の向きおよびポンプ押しのけ容積を制御する。  (もっと読む)
(もっと読む)
付加機能のある希釈システム試験装置およびその運転方法
部分希釈排気サンプリングシステム(20)の能力を、動力源(30)からの排気に2つの異なる評価を同時に行うように拡大する。粒子状物質生成に関する試験のほか、システム(20)は、NOxおよび二酸化炭素などの望まないガス状排出物に関して排気を同時に評価し得、および/または排気サンプル中の粒径および粒子分布を同時に評価し得る。動力源(30)の排気流からサンプル流を抜き取ってサンプル流に希釈剤を添加した後、希釈されたサンプル流は、第1の部分流と第2の部分流とに分割される。追加的な排気評価装置(81、83、86、87)が微粒子測定重量フィルタ(50)と並列であるかまたはフィルタ(50)と直列であるかに依存して、補助排気評価装置(81、83、86、87)に向けられた希釈されたサンプル流の部分を計上するために希釈流アクチュエータ(44)および/または出口アクチュエータ(53)を調整し得る。 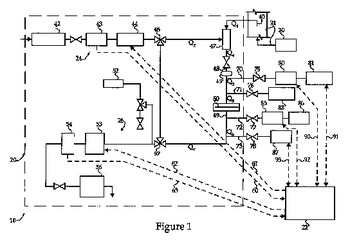 (もっと読む)
(もっと読む)
電気駆動式機械の駆動方向を制御するための方法とシステム
本願は、1つの態様において、第一の方向に移動している機械の方向を転換するための方法を開示する。この方法は、機械の方向を第二の方向に転換しようとする意思を示す信号を受信するステップを含む。この方法はまた、機械の速度を示す信号がある閾値より大きいか否かを、少なくとも部分的に電気モータのパラメータに基づいて判断するステップを含む。最後に、この方法は、速度が閾値に到達するまで、アクセルペダルの位置を示す信号に応答して制動トルクを機械の少なくとも1つの走行機構にかけるステップを含む。  (もっと読む)
(もっと読む)
可動機械用の位置監視システム
可動機械(20)および中央制御ステーション(30)を有するシステム(10)を提供する。可動機械は、通信装置(70)と、測位衛星(40)から位置データを受信するとともに位置信号を生成するように構成された受信機(55)を有する位置監視システム(50)とを有する。位置監視システムはまた、センサ(61、62、63)を有し、可動機械のパラメータを測定するとともに移動信号を生成するように構成された、慣性航法装置(60)も有する。位置監視システムはまた、位置信号および移動信号を受信し、位置信号が受信できないことを検出し、位置パラメータを計算し、パラメータの第1値と第2値との差が所定閾値を超えるか否かを確定し、警報信号を生成するように構成された、コントローラ(65)も有する。中央制御ステーションは、コントローラと通信し、位置信号および/または移動信号を受信し、可動機械の位置を監視するように構成されている。  (もっと読む)
(もっと読む)
電力インバータのグリッド接続遷移制御
電力インバータ(140)の制御システムが開示される。電力インバータはグリッド(190)を接続および切断するように構成された接触器(180)に結合されてもよい。制御システムは複数の出力電圧センサ(172〜175)と複数の出力電流センサ(182〜185)を含んでもよい。グリッドが接続されると出力電圧センサは接触器における少なくとも2つのライン電圧を測定するように構成され、出力電流センサは接触器における少なくとも2つのライン電流を測定するように構成されてもよい。制御システムは出力電圧センサと出力電流センサに接続されたコントローラ(200)をさらに含んでもよい。コントローラは電力インバータの出力電圧の目標振幅と目標周波数を決定するように構成されてもよい。コントローラはさらに目標振幅と目標周波数に基づき複数の電力トランジスタスイッチングパルスを決定するように構成されてもよい。制御システムはまた、コントローラと電力インバータに接続されたインターフェース回路(210)を含んでもよい。インターフェース回路は電力インバータに電力トランジスタスイッチングパルスを供給するように構成されてもよい。  (もっと読む)
(もっと読む)
無限軌道式機械のためのアイドラと車台アセンブリ
無限軌道式機械(13)の車台アセンブリ(10)のアイドラ(25)が開示される。車台アセンブリは少なくとも2つのリンク(55)を有していてもよく、これらはカートリッジ(34)によって相互連結されていてもよい。カートリッジは、ピン(43)の周囲に配置され、これに関して回転可能なブッシュ(37)を有していてもよい。リンクの少なくとも1つは、リンクレール摩耗面(61)を有していてもよく、この摩耗面は、ブッシュから当初摩耗面高さ(82)の位置に位置付けられていてもよい。アイドラは下側面(67)を有していてもよく、下側面はリンクレール摩耗面に当たって摩耗するように構成されていてもよい。アイドラはまた、上側面(70)を有していてもよく、上側面はブッシュに当たって摩耗するように構成されていてもよい。上側面は、下側面から半径方向に、当初上側面高さ(85)の分だけ外側に位置付けられていてもよい。当初上側面高さは、当初摩耗面高さの約70%と約90%の間であってもよい。  (もっと読む)
(もっと読む)
31 - 40 / 296
[ Back to top ]