
ブルックス オートメーション インコーポレイテッドにより出願された特許
11 - 20 / 81
マニピュレータの自動ティーチング及び位置補正システム
処理デバイスの少なくとも一部を囲むハウジングと、当該処理デバイスに取り付けられた少なくとも1つの標的と、ハウジング内に配されている少なくとも1つの送信機であって、当該少なくとも1つの標的に当該少なくとも1つの送信機を特定する識別信号を送信する少なくとも1つの送信機と、当該少なくとも1つの標的及び当該少なくとも1つの送信機に動作可能に接続されているコントローラと、を含む基板処理システムであって、当該処理デバイスは、当該少なくとも1つの標的と既知の関係にある第1の処理デバイス基準点を有し、当該コントローラは当該識別信号に基づいて、当該少なくとも1つの標的及び当該少なくとも1つの送信機のうちの1つからデータ信号を受信して、当該データ信号に基づいて当該処理デバイスの動作特徴を制御する基板処理システム。  (もっと読む)
(もっと読む)
排気系が組み込まれたプロセスチャンバ

【課題】プロセスチャンバとポンプとの間のバルブや導管に起因するコンダクタンス損失を低減または解消し、かつ、ポンプをプロセスチャンバのプロセス空間に流入する気体分子の気体分子源に対して最適な位置に配置することができるプロセスチャンバシステムを提供する。
【解決手段】本発明のプロセスチャンバシステム500は、プロセス空間514を有するプロセスチャンバと、プロセスチャンバに着脱可能に取り付けられた複数の冷凍機502と、冷凍機502に着脱可能に取り付けられた複数のアレイ504とを備える。冷凍機502とアレイ504とがプロセスチャンバ内に延在して、プロセス空間514内に排気面を形成している。この排気面は、プロセス空間に連通する気体分子源の近傍に配置され得る。
(もっと読む)
真空品質測定システム

【課題】複雑性を最小限に抑えたかまたは解消したガス分析装置を提供する。
【解決手段】本発明の真空チャンバ用のガス分析装置は電子処理部を備えており、この電子処理部が、質量スペクトルデータを受け入れ、真空チャンバ内の全圧を示す入力を受け入れ、少なくとも1つのセンサからの外部入力を受け入れ、これら質量スペクトルデータ、真空チャンバ内の全圧、および少なくとも1つのセンサからの外部入力を用いて、少なくとも1つの品質基準に基づき真空品質指数を算出するように構成されている。
(もっと読む)
基板搬送装置及び方法
【課題】大型基板インデックス型ロードロック群を有する装置に匹敵する基板スループットを達成可能で且つ相当に低コストの基板処理装置を提供する。
【解決手段】基板処理装置50において、複数の基板支持シェルフ有する第1の基板保持位置を有するロードロック58に対して基板を搬入及び搬出する方法であって、非インデックス型ロードロックであるロードロック58が有する前記第1の基板保持位置内の第1の基板支持シェルフから未処理基板を除去するステップと、前記未処理基板が、前記基板保持位置の前記基板支持シェルフの垂直方向運動無しに前記第1の基板支持シェルフから除去された後かつ他のいずれかの既処理または未処理基板が、ロードロック58が有する前記第1の基板保持位置の他の基板支持シェルフに挿入もしくはそこから除去される前に既処理の基板を前記第1の基板支持シェルフに挿入する挿入ステップと、を含む。
(もっと読む)
異なる保持エンドエフェクタを有する基板搬送装置
【課題】基板処理装置の基板移動方法に関し、大気搬送部分での、第1エンドエフェクタと第2のエンドエフェクタでの搬送機構を提供する。
【解決手段】半導体基板を第1位置から第2位置に移す装置。該第1及び第2位置は個別的な支持領域において複数の該半導体を保持するようになされている。その装置は、個別的に支える半導体の異なった最大数の支持領域をおのおのが有する2つの基板保持エンドエフェクタ46,48を有する搬送機構を含む。該半導体は該第1位置から該第2位置へと該第1エンドエフェクタ46によって搬送され、該第2位置又は該第1位置における空の個別的支持領域が該第1エンドエフェクタ46上の支持領域の該最大数よりも小さいときは、該第1位置から該第2位置へと該第2エンドエフェクタ48を用いて基板を搬送する。
(もっと読む)
静電型イオントラップ
【課題】高い圧力でもスペクトルのノイズを抑え、基線オフセットおよびスペクトル分解能の損失が小さい、イオンとラップを提供する。
【解決手段】
第1および第2の対向ミラー電極6,7ならびにミラー電極6,7間の中央レンズ3を含む電極構造体を含み、電極構造体は、イオンを固有振動周波数において軌跡に閉じ込める静電電位を生成し、閉じ込め電位は非調和である。さらに、イオンの固有振動周波数の約2倍の周波数で閉じ込められたイオンを励起させる励起周波数fを有するAC励起源21を含み、AC励起周波数源は、好ましくは、中央レンズ3に接続される。
(もっと読む)
バッチローダーを有する二本アーム・サブストレート取扱いロボット
【課題】ロボットに基づいたサブストレートの大量移送のための改良技術を提供する。
【解決手段】サブストレート取扱いロボット20は第一アーム22と第二アーム26が接続されているアーム駆動機構34を含む。複数サブストレート・バッチローダー24が第一アーム22に接続され、単一面エンド・エフェクタ28が第二アーム26に接続されている。複数サブストレート・バッチローダー24は保持するサブストレート数を示す真空信号を生じる。真空信号インタープリータがサブストレート装荷数に応じて、第一アーム22の運動を代える。第二アーム26に接続されている対象物センサー58は、複数サブストレート・バッチローダー24に隣接するカセットの中のサブストレート数を査定する。サブストレート装荷順コントローラが、カセットの中のサブストレート数に応じて、アームの運動を制御し、複数サブストレート・バッチローダー24の完全装荷を促進する。
(もっと読む)
基板処理装置
搬送装置の駆動システムは、搬送装置に接続されている複数の永久マグネット、複数の永久マグネットの少なくとも1つの磁界に曝されている複数の固定巻線、固定巻線に電圧を加えて搬送装置に磁力をもたらす制御システム、及び搬送装置の浮揚、ピッチ及びロールの受動的安定化を提供するための搬送装置の少なくとも一側部に近接している強磁性コンポーネントの配列を含んでいる。 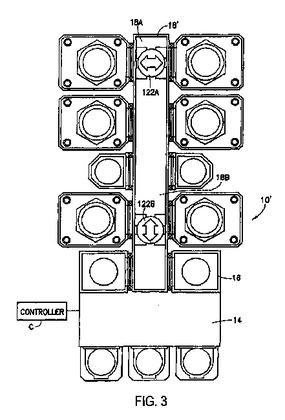 (もっと読む)
(もっと読む)
フロントエンド拡張部及び内部基板バッファを備えた基板搬送装置を有する基板処理装置
【課題】基板搬送装置チャンバ(31)に連結される複数の基板処理モジュール(14)を有する基板処理装置(10)を提供すること。
【解決手段】基板搬送チャンバ(31)は、ハウジング(13)と基板搬送機構(22)とを有する。ハウジング(13)は、基板処理モジュール(14)のためのメイン搬送チャンバへの出入り口を有する実質的に閉じたメイン搬送チャンバ(31)を形成する。搬送機構(22)は基板保持体(29)を有し、基板保持体は可動に該搬送チャンバ(31)に設けられる。ハウジング(13)はフロントエンド拡張部(30)を有し、フロントエンド拡張部は装填ロック(16)に連結される。フロントエンド(28)の拡張部(30)は、整列器(32)と、冷却器(36)と、バッファ(34)とを有し、バッファはハウジング(13)に直接連結され且つメイン搬送チャンバ(31)の一部であるフロントエンド拡張部(30)内に位置する。
(もっと読む)
放出電流およびバイアス電圧を制御する電離真空計
【課題】電子源の歪力を軽減しながら、様々な圧力レベルでの動作において、スパッタリングによる損傷を受けることがない電離真空計、そのような電離真空計を使用した圧力測定方法、および真空の気体雰囲気内での各種方法を提供する。
【解決手段】本発明の電離真空計100は、電子125を放出する電子源105と、イオン化空間を形成する陽極120と、電子とイオン化空間における気体との衝突によって生成されるイオンを収集する収集電極110とを備える。なお、コントローラ105aにより、動作時の電子源105からの放出電流を、圧力以外の検出パラメータに応答して能動的に制御するように構成されている。
(もっと読む)
11 - 20 / 81
[ Back to top ]